
一种仿生水下机器人.pdf

文库****品店

1/4
2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种水下仿生机器人.pdf
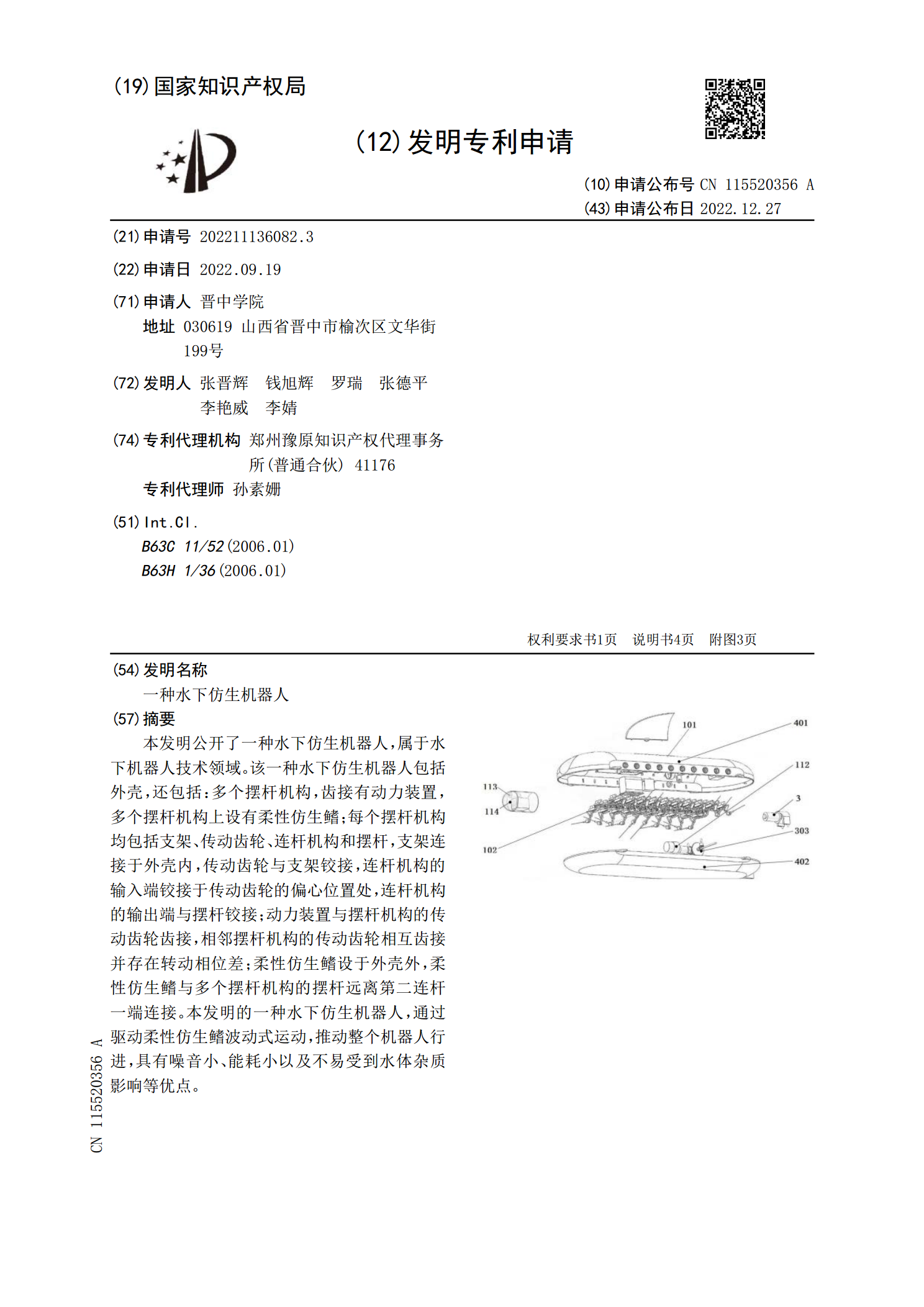
本发明公开了一种水下仿生机器人,属于水下机器人技术领域。该一种水下仿生机器人包括外壳,还包括:多个摆杆机构,齿接有动力装置,多个摆杆机构上设有柔性仿生鳍;每个摆杆机构均包括支架、传动齿轮、连杆机构和摆杆,支架连接于外壳内,传动齿轮与支架铰接,连杆机构的输入端铰接于传动齿轮的偏心位置处,连杆机构的输出端与摆杆铰接;动力装置与摆杆机构的传动齿轮齿接,相邻摆杆机构的传动齿轮相互齿接并存在转动相位差;柔性仿生鳍设于外壳外,柔性仿生鳍与多个摆杆机构的摆杆远离第二连杆一端连接。本发明的一种水下仿生机器人,通过驱动柔性

一种仿生水下机器人.pdf
(19)中华人民共和国国家知识产权局(12)发明专利说明书(10)申请公布号CN112706171A(43)申请公布日2021.04.27(21)申请号CN201911064564.0(22)申请日2019.10.26(71)申请人昆山市克洛弗智能科技有限公司地址215300江苏省昆山市玉山镇登云路268号1号房311室(72)发明人韩昊轩(74)专利代理机构代理人(51)Int.CIB25J11/00(20060101)B63C11/52(20060101)权利要求说明书说明书幅图(54)发明名称一种仿
一种仿生鳐鱼水下机器人.pdf
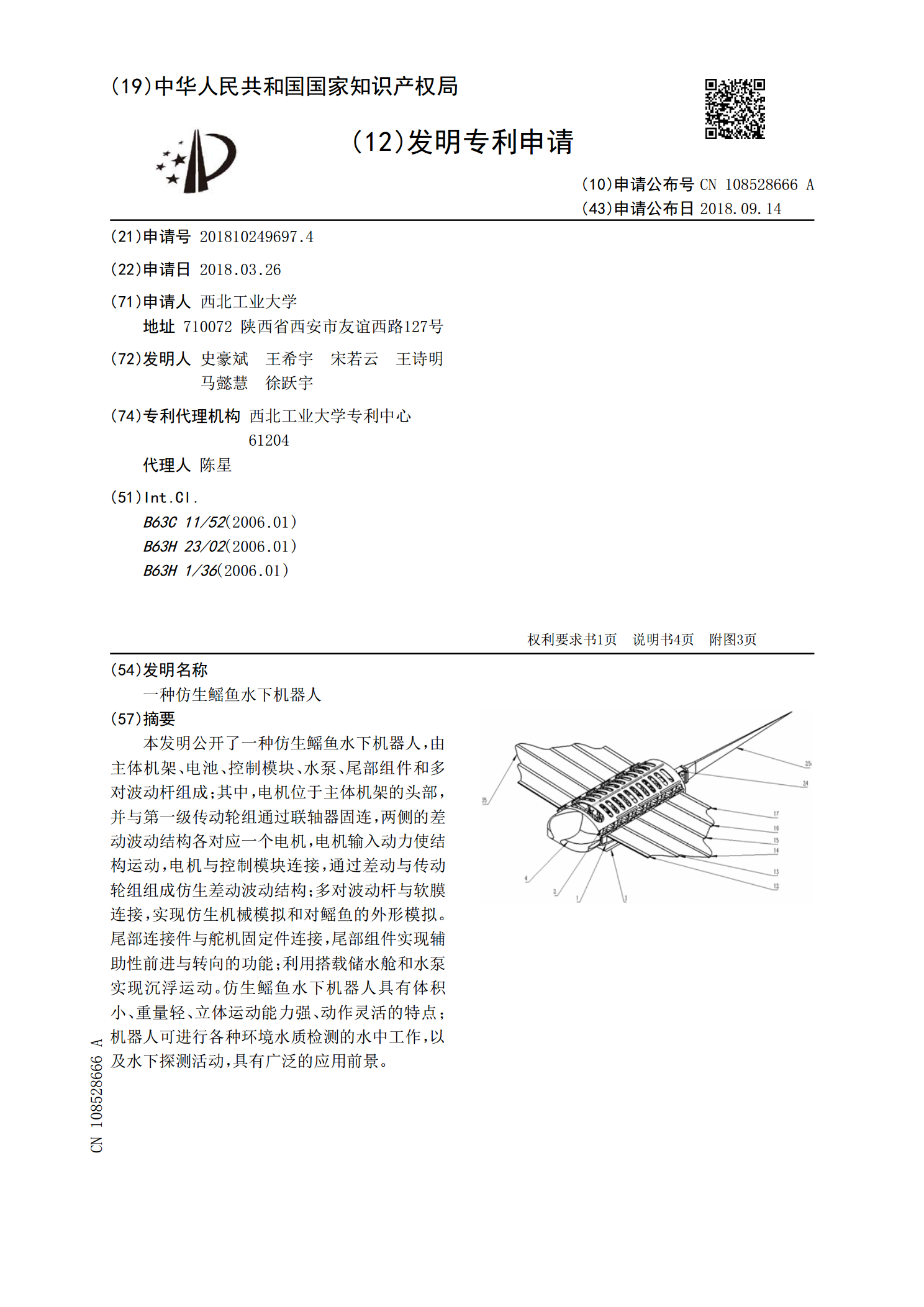
本发明公开了一种仿生鳐鱼水下机器人,由主体机架、电池、控制模块、水泵、尾部组件和多对波动杆组成;其中,电机位于主体机架的头部,并与第一级传动轮组通过联轴器固连,两侧的差动波动结构各对应一个电机,电机输入动力使结构运动,电机与控制模块连接,通过差动与传动轮组组成仿生差动波动结构;多对波动杆与软膜连接,实现仿生机械模拟和对鳐鱼的外形模拟。尾部连接件与舵机固定件连接,尾部组件实现辅助性前进与转向的功能;利用搭载储水舱和水泵实现沉浮运动。仿生鳐鱼水下机器人具有体积小、重量轻、立体运动能力强、动作灵活的特点;机器人
一种水下仿生叶轮.pdf
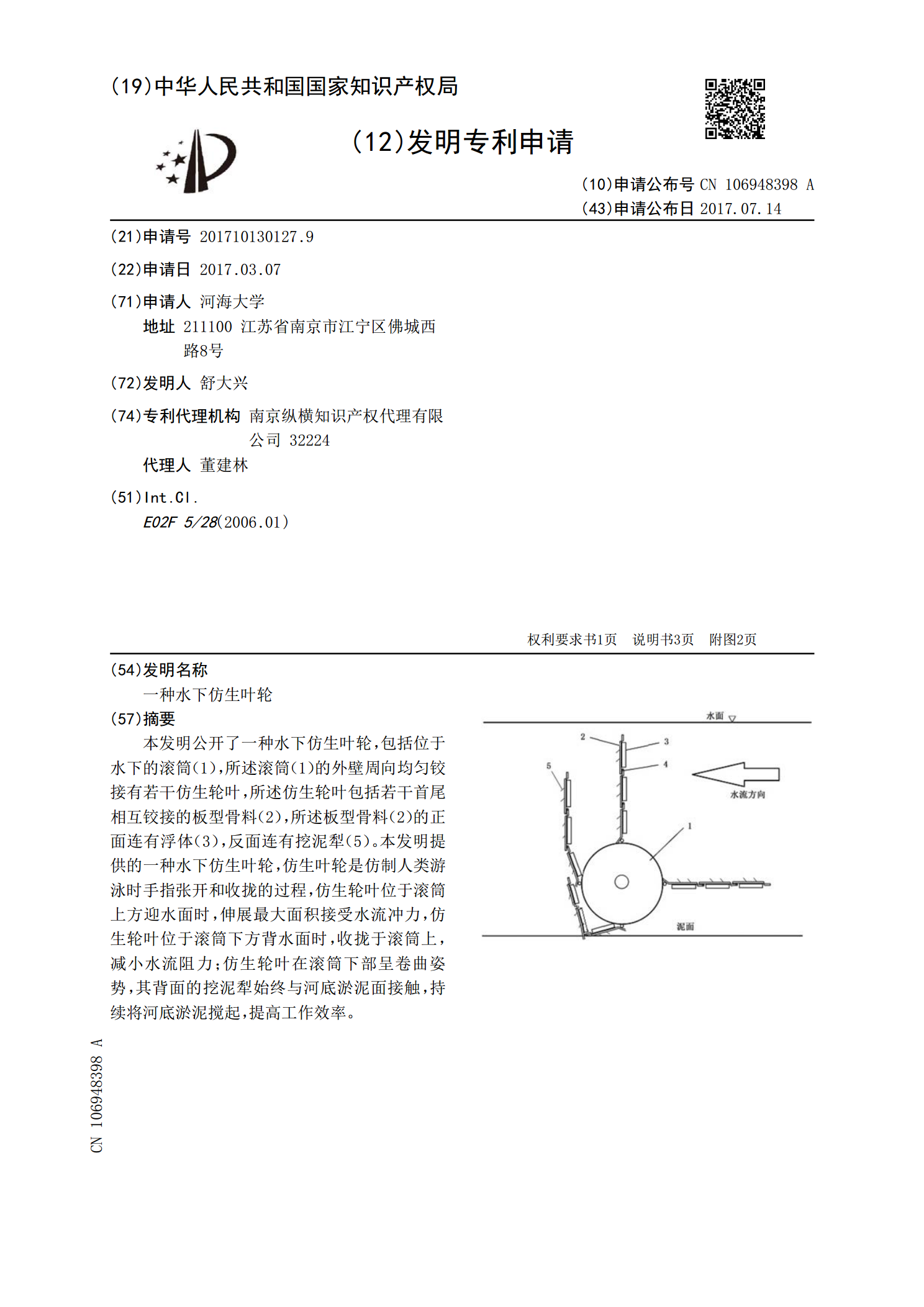
本发明公开了一种水下仿生叶轮,包括位于水下的滚筒(1),所述滚筒(1)的外壁周向均匀铰接有若干仿生轮叶,所述仿生轮叶包括若干首尾相互铰接的板型骨料(2),所述板型骨料(2)的正面连有浮体(3),反面连有挖泥犁(5)。本发明提供的一种水下仿生叶轮,仿生叶轮是仿制人类游泳时手指张开和收拢的过程,仿生轮叶位于滚筒上方迎水面时,伸展最大面积接受水流冲力,仿生轮叶位于滚筒下方背水面时,收拢于滚筒上,减小水流阻力;仿生轮叶在滚筒下部呈卷曲姿势,其背面的挖泥犁始终与河底淤泥面接触,持续将河底淤泥搅起,提高工作效率。
一种仿生波动鳍推进的水下多用途机器人.pdf
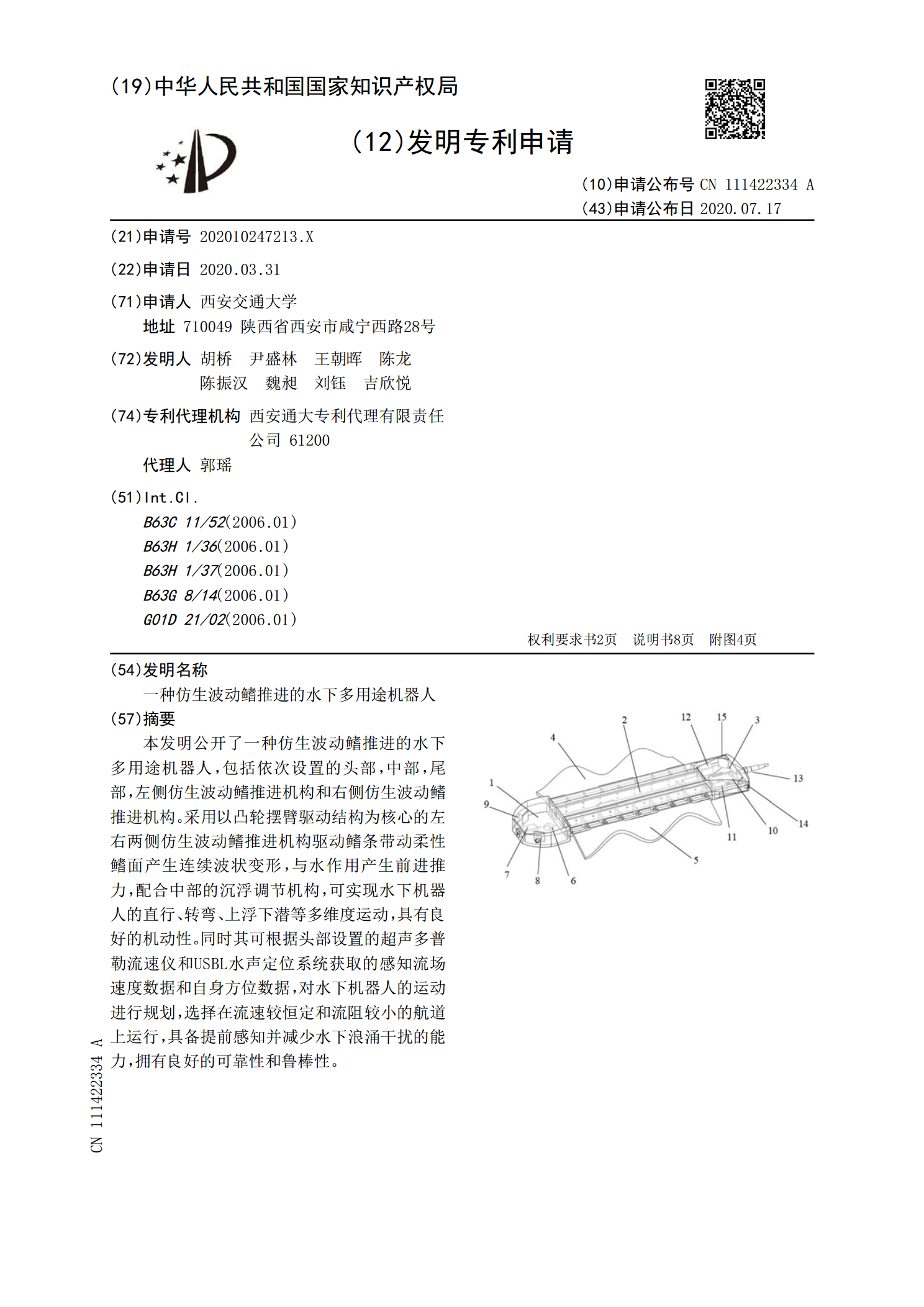
本发明公开了一种仿生波动鳍推进的水下多用途机器人,包括依次设置的头部,中部,尾部,左侧仿生波动鳍推进机构和右侧仿生波动鳍推进机构。采用以凸轮摆臂驱动结构为核心的左右两侧仿生波动鳍推进机构驱动鳍条带动柔性鳍面产生连续波状变形,与水作用产生前进推力,配合中部的沉浮调节机构,可实现水下机器人的直行、转弯、上浮下潜等多维度运动,具有良好的机动性。同时其可根据头部设置的超声多普勒流速仪和USBL水声定位系统获取的感知流场速度数据和自身方位数据,对水下机器人的运动进行规划,选择在流速较恒定和流阻较小的航道上运行,具备