
一种抓取机构.pdf

夏萍****文章

1/9
2/9
3/9

4/9

5/9
6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种抓取机构.pdf
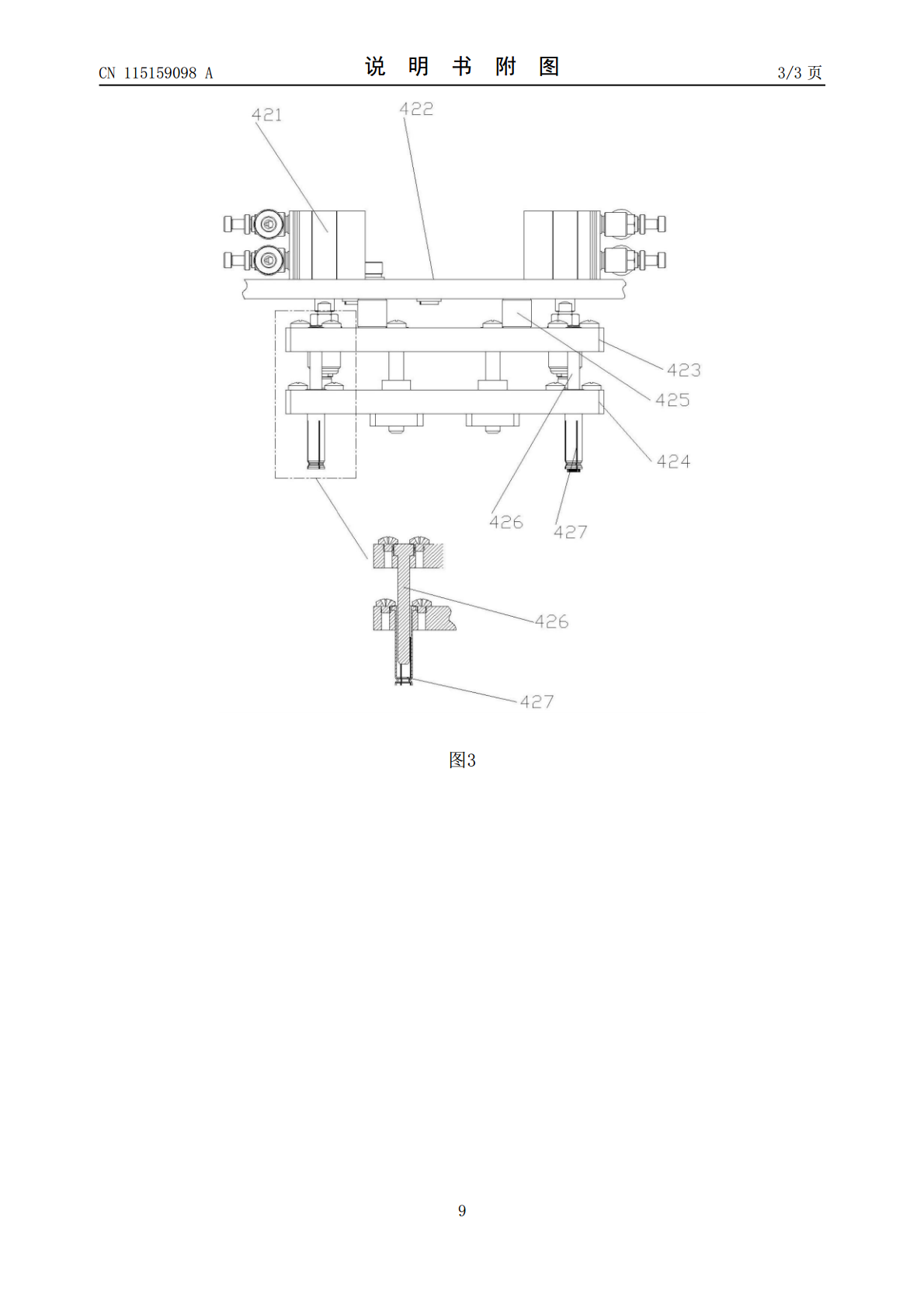
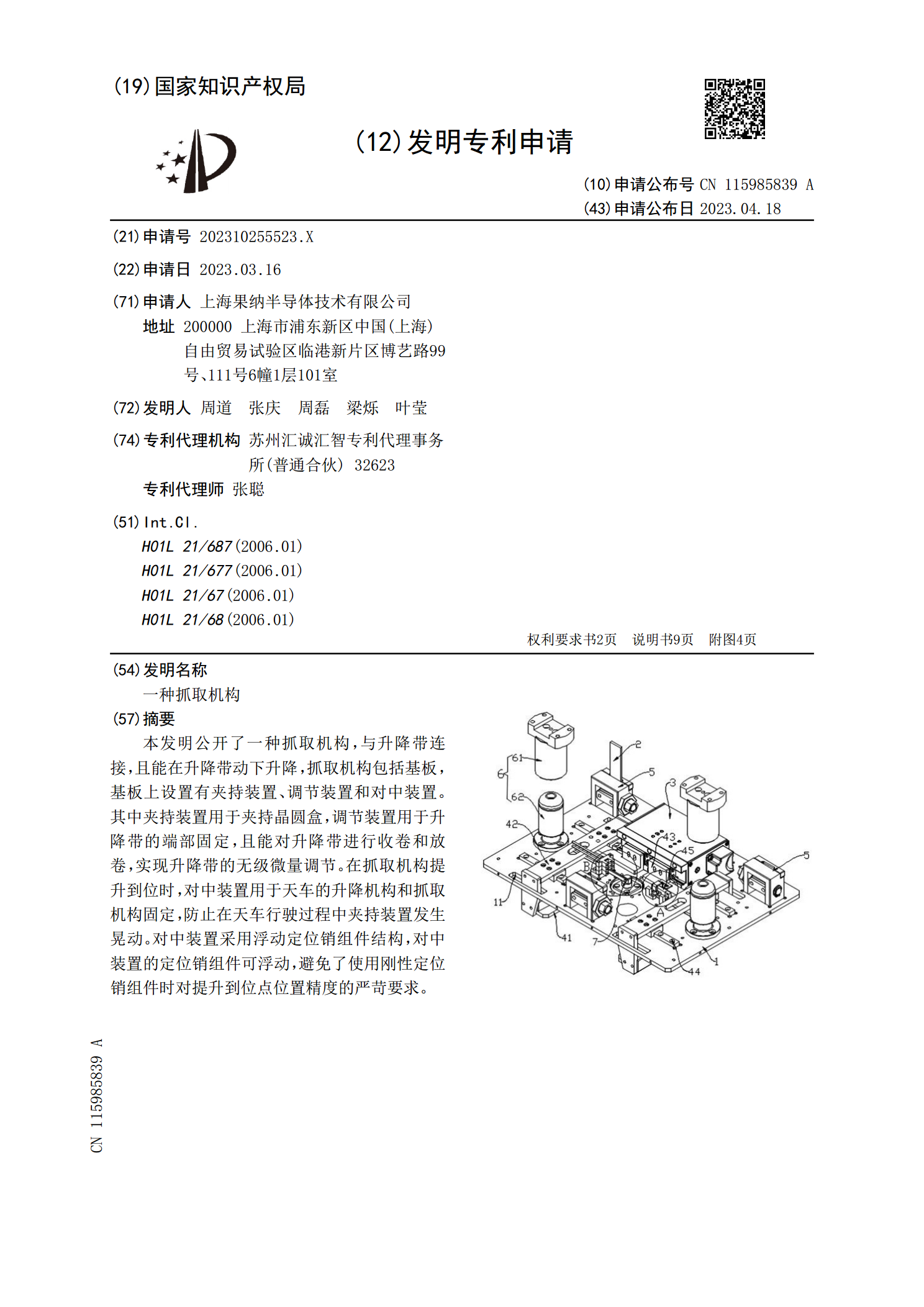
本发明公开了一种抓取机构,与升降带连接,且能在升降带动下升降,抓取机构包括基板,基板上设置有夹持装置、调节装置和对中装置。其中夹持装置用于夹持晶圆盒,调节装置用于升降带的端部固定,且能对升降带进行收卷和放卷,实现升降带的无级微量调节。在抓取机构提升到位时,对中装置用于天车的升降机构和抓取机构固定,防止在天车行驶过程中夹持装置发生晃动。对中装置采用浮动定位销组件结构,对中装置的定位销组件可浮动,避免了使用刚性定位销组件时对提升到位点位置精度的严苛要求。
一种抓取机构.pdf
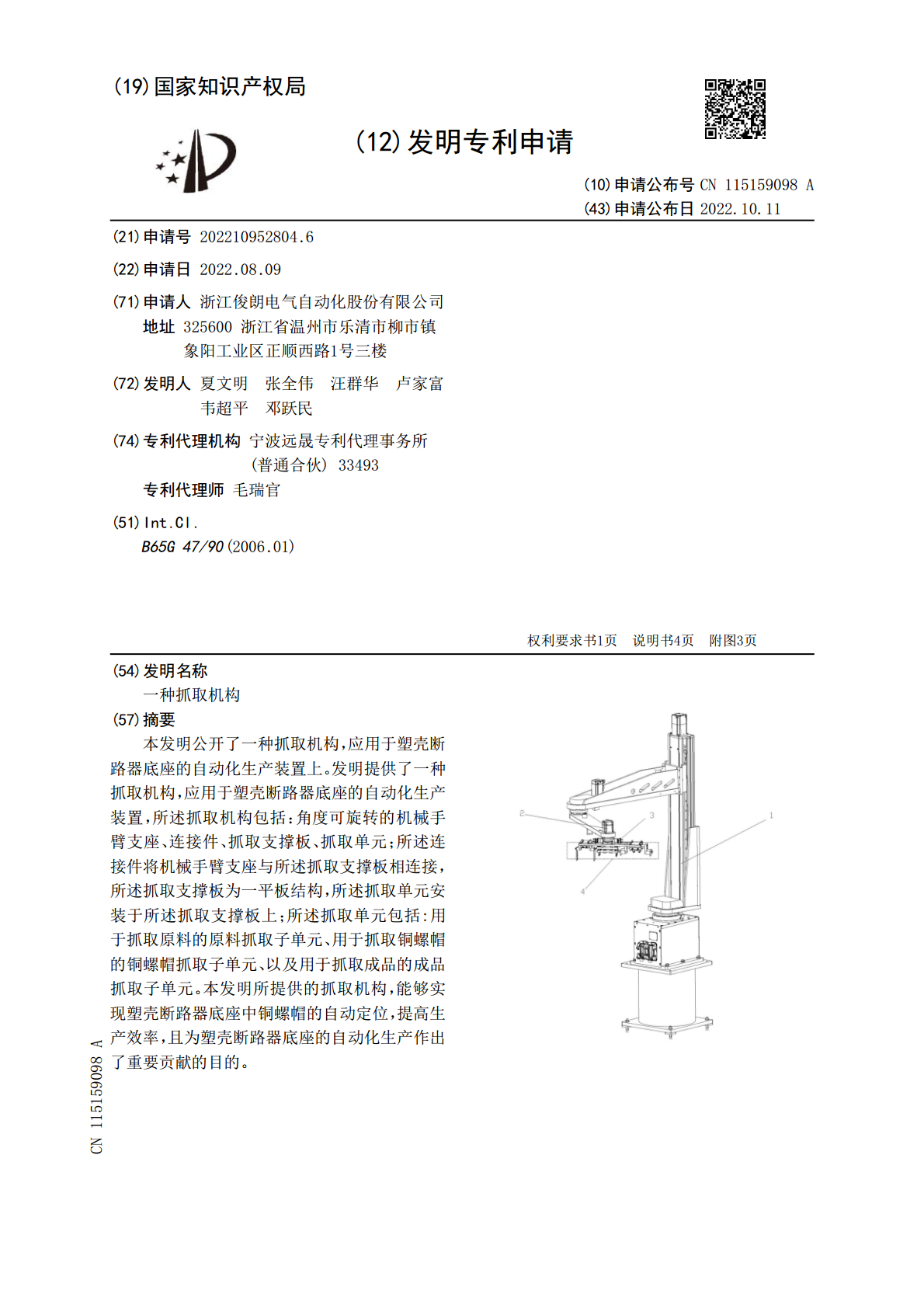
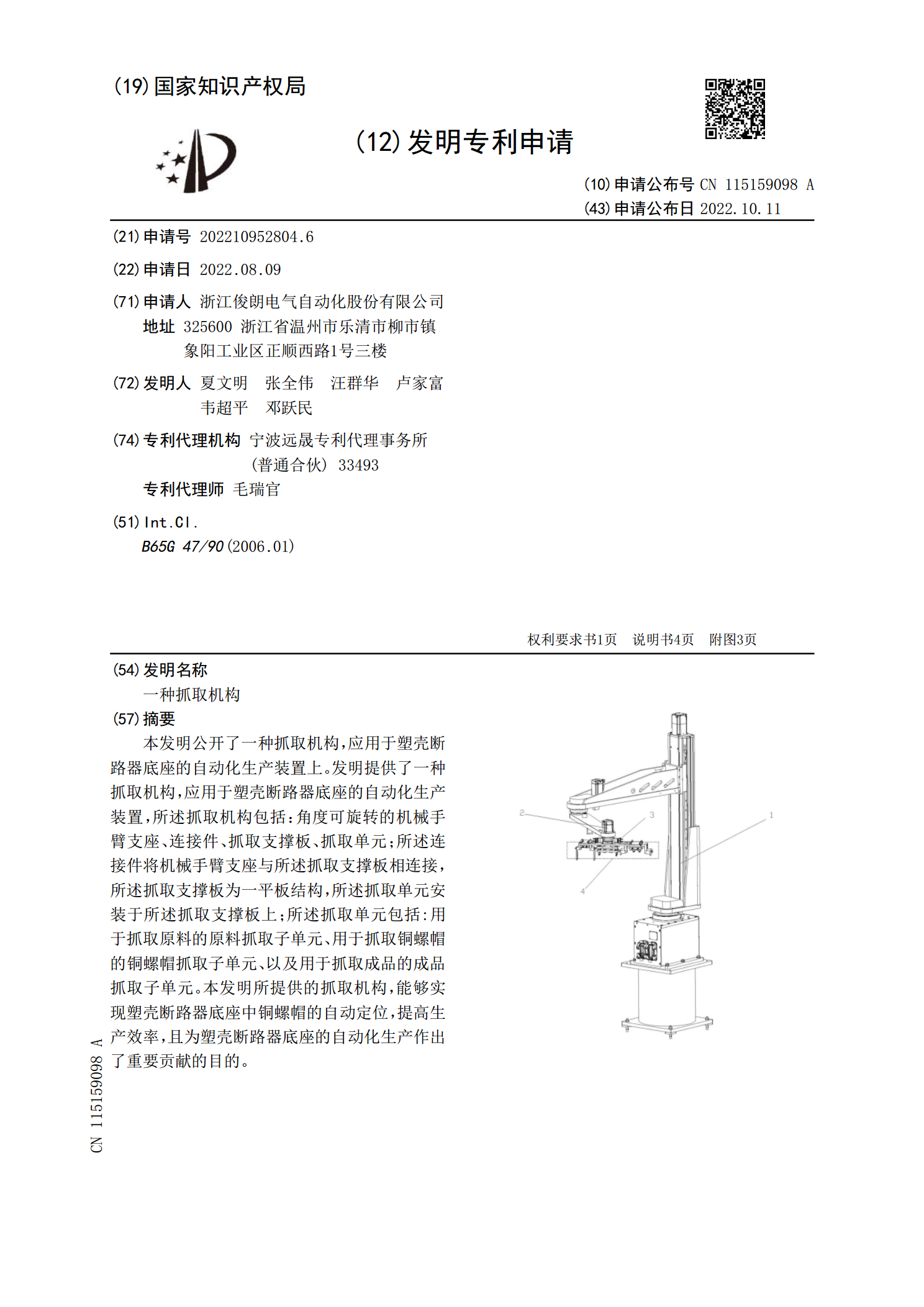
本发明公开了一种抓取机构,应用于塑壳断路器底座的自动化生产装置上。发明提供了一种抓取机构,应用于塑壳断路器底座的自动化生产装置,所述抓取机构包括:角度可旋转的机械手臂支座、连接件、抓取支撑板、抓取单元;所述连接件将机械手臂支座与所述抓取支撑板相连接,所述抓取支撑板为一平板结构,所述抓取单元安装于所述抓取支撑板上;所述抓取单元包括:用于抓取原料的原料抓取子单元、用于抓取铜螺帽的铜螺帽抓取子单元、以及用于抓取成品的成品抓取子单元。本发明所提供的抓取机构,能够实现塑壳断路器底座中铜螺帽的自动定位,提高生产效率,
一种抓取机构.pdf
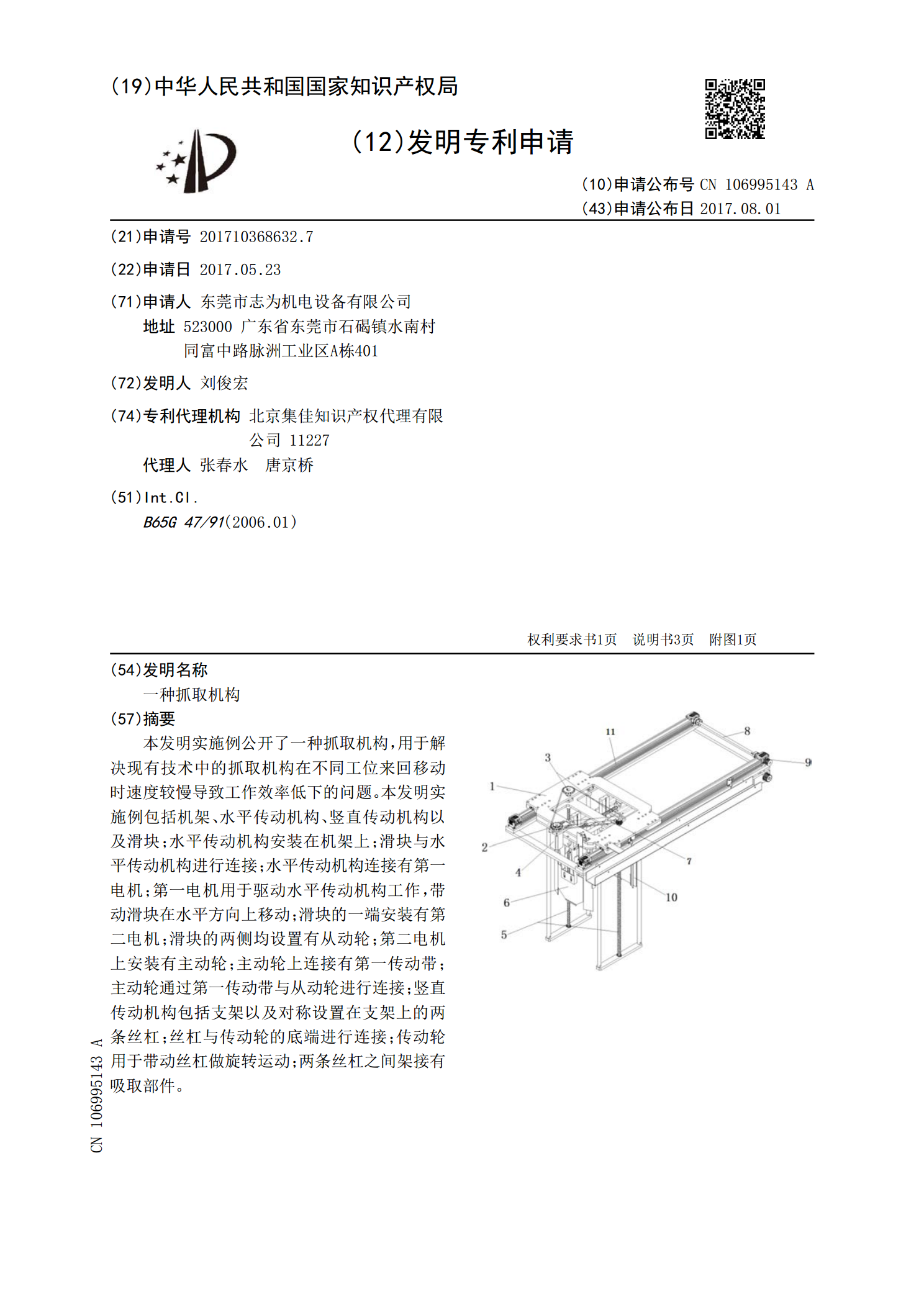
本发明实施例公开了一种抓取机构,用于解决现有技术中的抓取机构在不同工位来回移动时速度较慢导致工作效率低下的问题。本发明实施例包括机架、水平传动机构、竖直传动机构以及滑块;水平传动机构安装在机架上;滑块与水平传动机构进行连接;水平传动机构连接有第一电机;第一电机用于驱动水平传动机构工作,带动滑块在水平方向上移动;滑块的一端安装有第二电机;滑块的两侧均设置有从动轮;第二电机上安装有主动轮;主动轮上连接有第一传动带;主动轮通过第一传动带与从动轮进行连接;竖直传动机构包括支架以及对称设置在支架上的两条丝杠;丝杠与
一种抓取机构.pdf
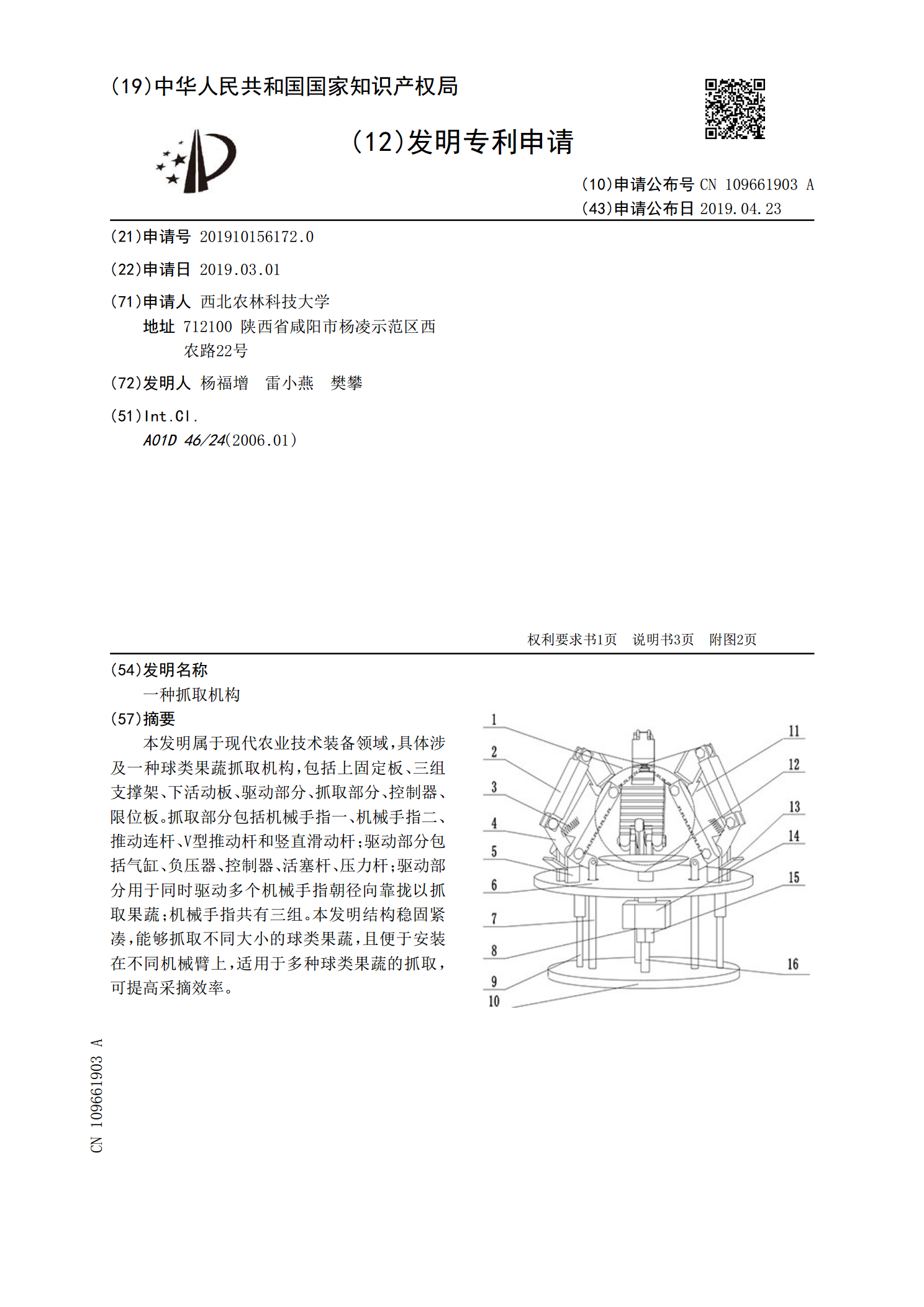
本发明属于现代农业技术装备领域,具体涉及一种球类果蔬抓取机构,包括上固定板、三组支撑架、下活动板、驱动部分、抓取部分、控制器、限位板。抓取部分包括机械手指一、机械手指二、推动连杆、V型推动杆和竖直滑动杆;驱动部分包括气缸、负压器、控制器、活塞杆、压力杆;驱动部分用于同时驱动多个机械手指朝径向靠拢以抓取果蔬;机械手指共有三组。本发明结构稳固紧凑,能够抓取不同大小的球类果蔬,且便于安装在不同机械臂上,适用于多种球类果蔬的抓取,可提高采摘效率。
一种可同时抓取多个产品的抓取机构.pdf
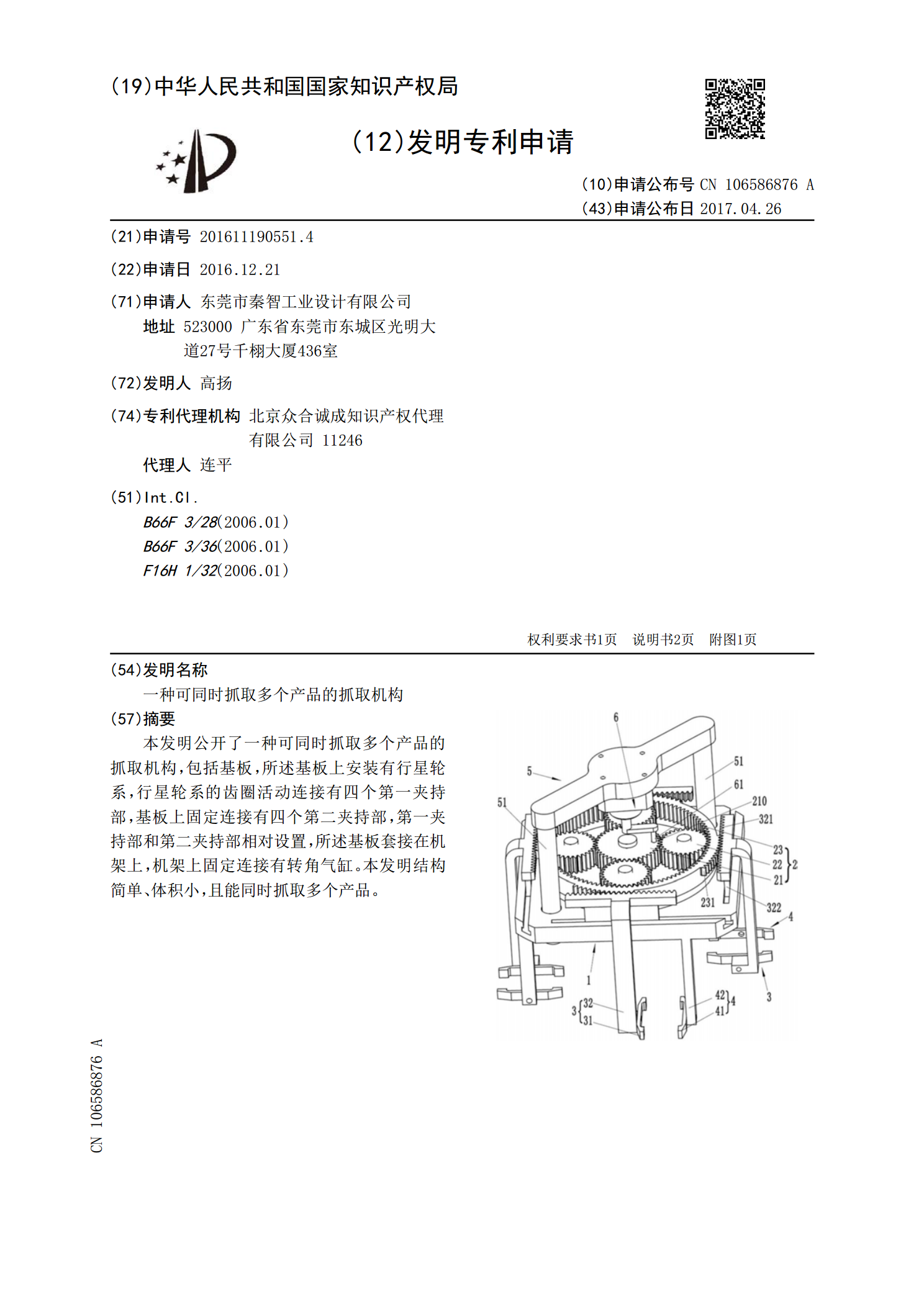
本发明公开了一种可同时抓取多个产品的抓取机构,包括基板,所述基板上安装有行星轮系,行星轮系的齿圈活动连接有四个第一夹持部,基板上固定连接有四个第二夹持部,第一夹持部和第二夹持部相对设置,所述基板套接在机架上,机架上固定连接有转角气缸。本发明结构简单、体积小,且能同时抓取多个产品。