
工业机器人软件仿真码垛工作站.pdf

文库****品店

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

工业机器人软件仿真码垛工作站.pdf
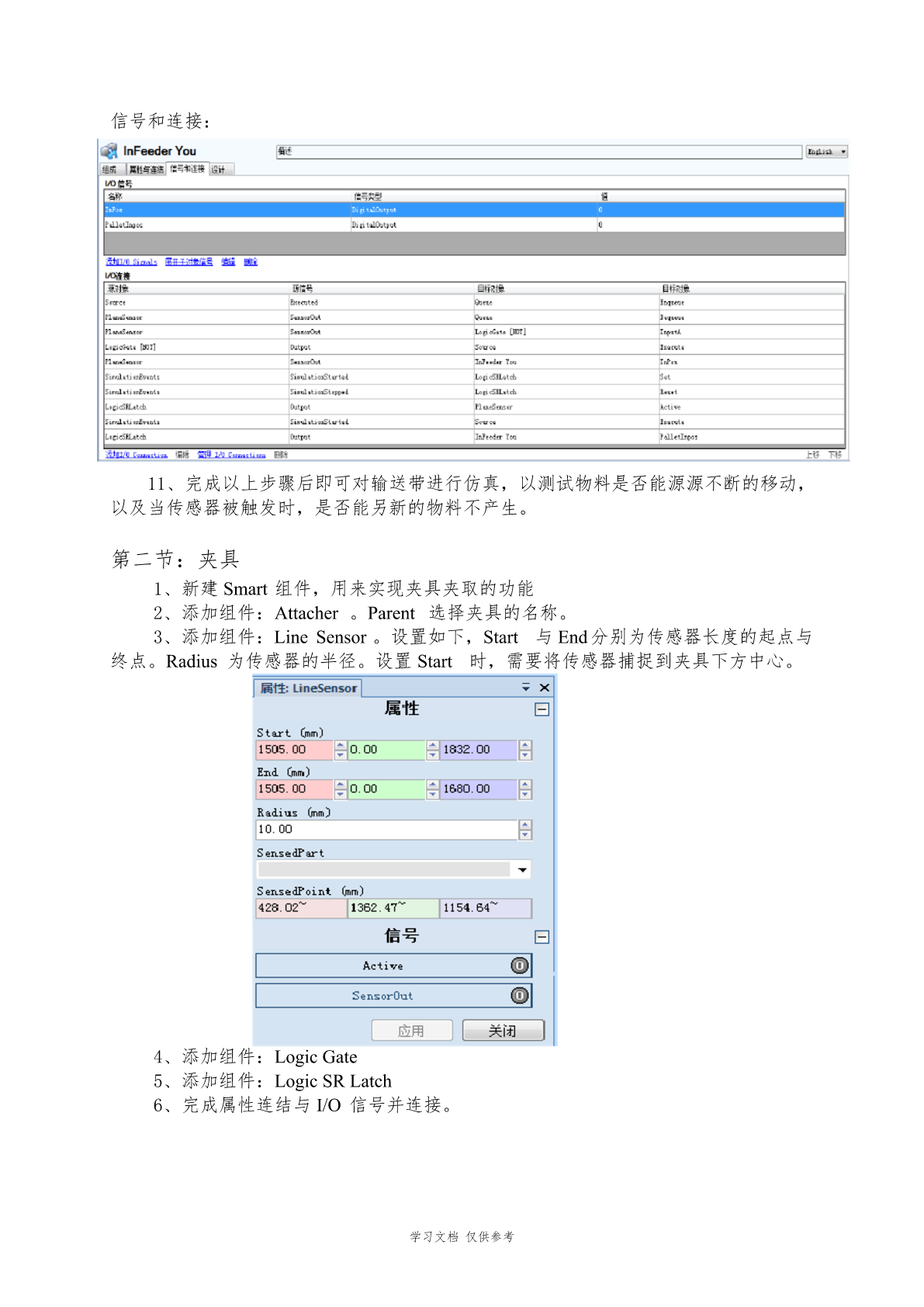
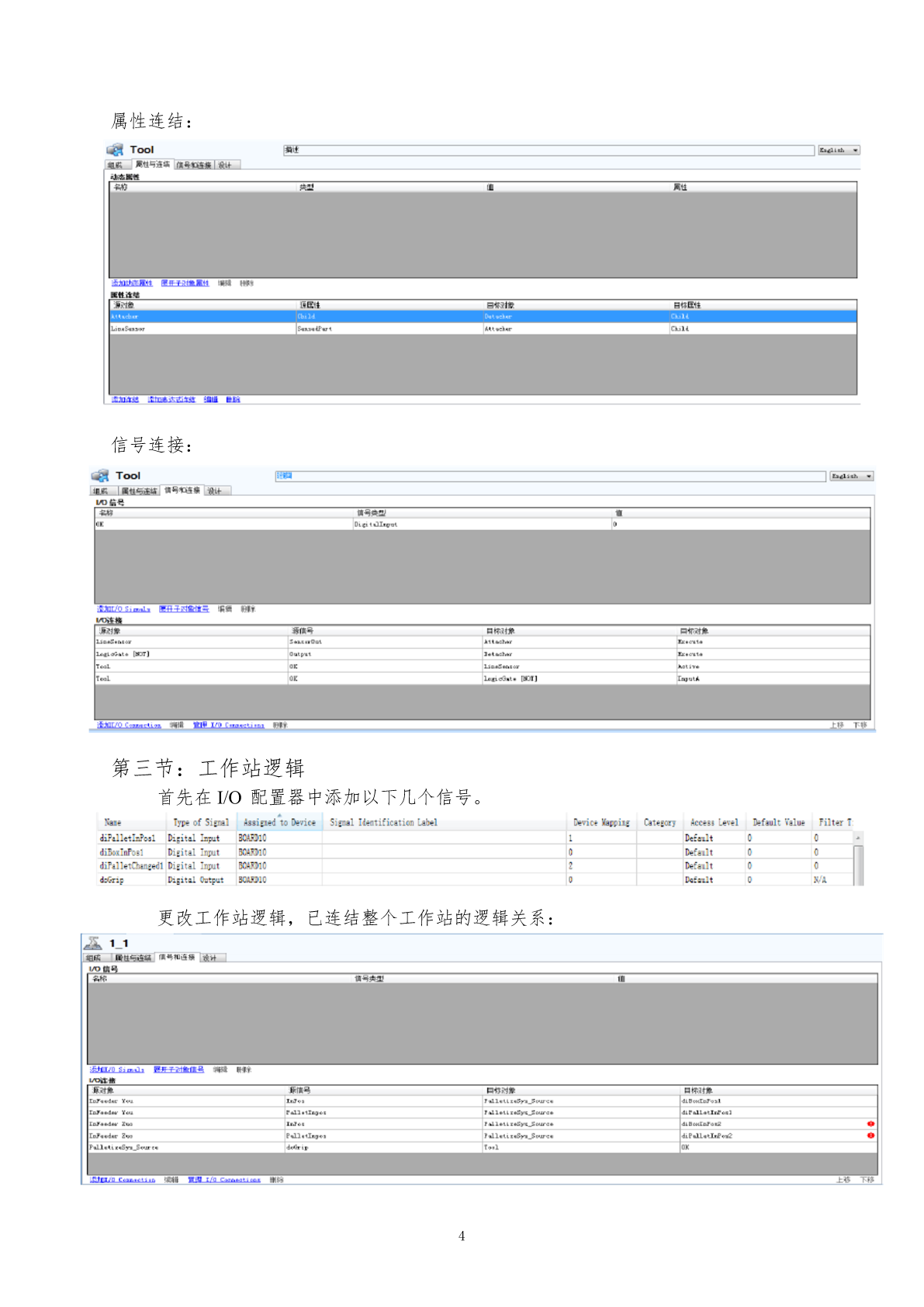
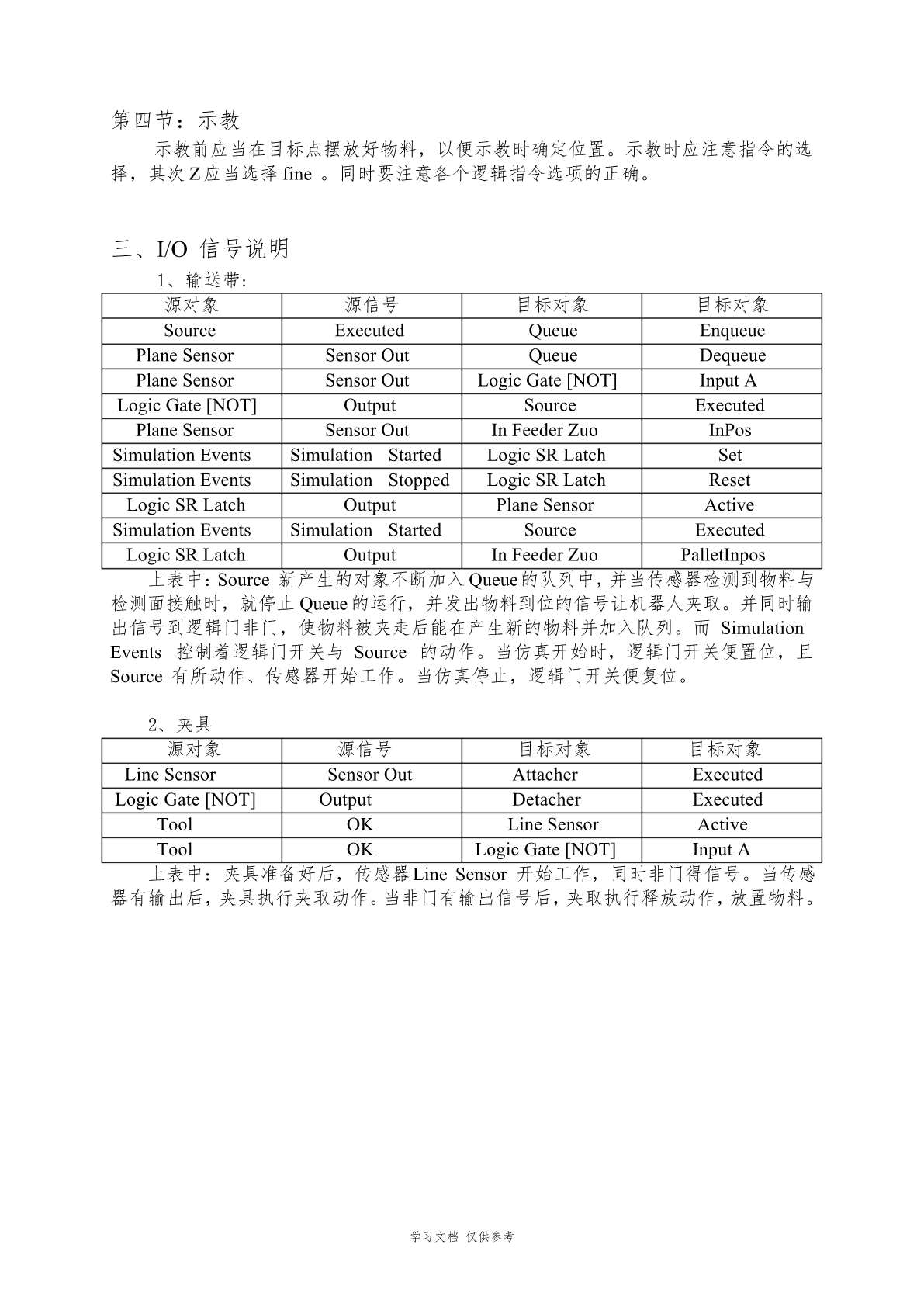
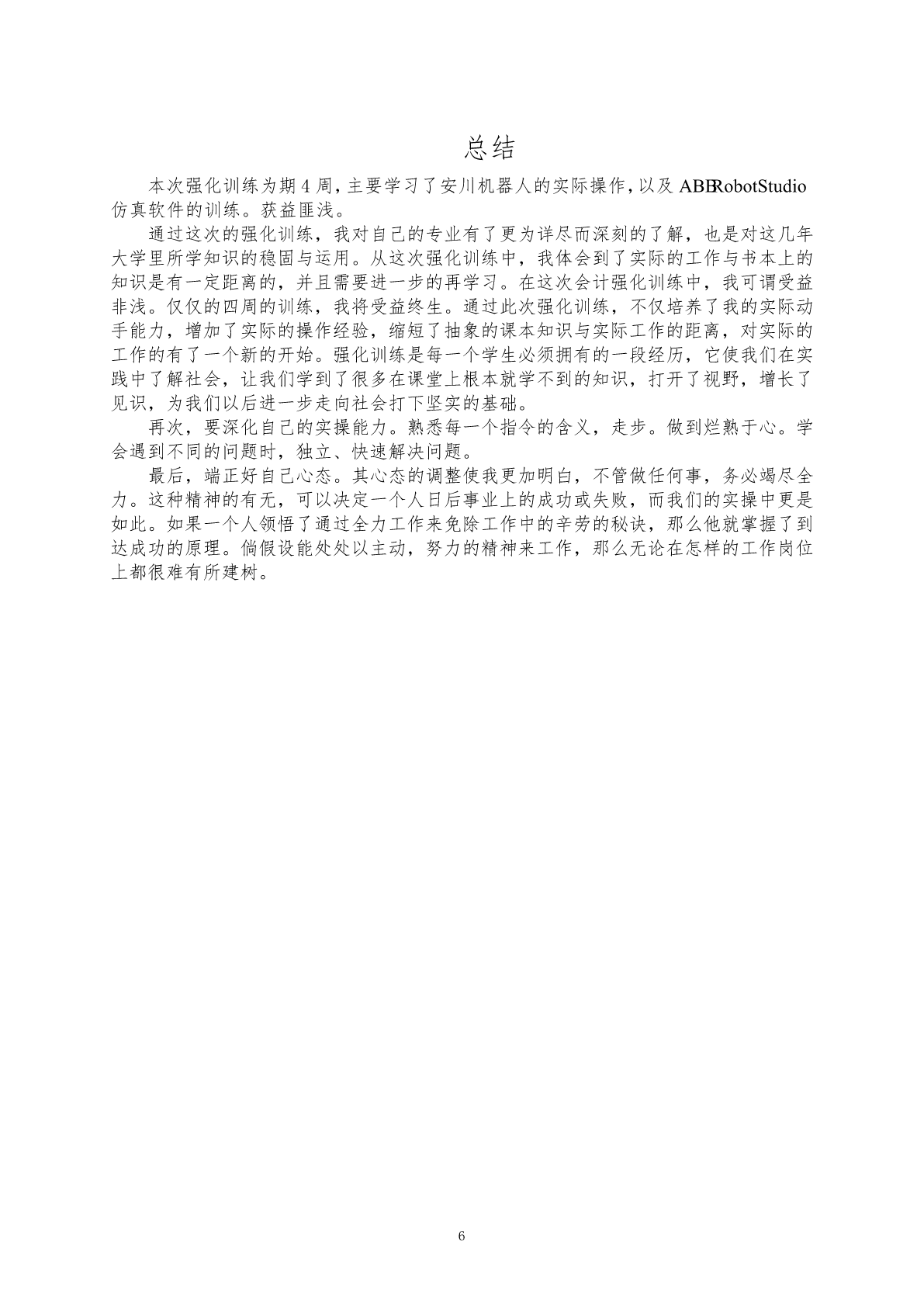
工业自动化技术强化训练Ⅱ实践报告工业机器人码垛应用作者姓名:指导老师:所在学院:提交日期:绪论一、摘要本次强化训练的时间为期4周,通过对ABB机器人的学习与操作,以完成本次强化训练的要求。这着4周的学习过程中,学习包括机器人的发展历程和机械结构等理论方面,还包含了编程、机器人I/O的接线。同时练习实操机器人,这是一个必不可少的环节,只有理论与实践相结合,才能出真知。在前一周的实操中完成了机器人循迹。而本次强化训练的重点为,利用ABBRobotStudio对双输送线单机械臂工作站完成工作站搭建并模拟仿真。A
工业机器人机箱码垛仿真工作站设计.pdf
目录一、设计思路................................................................................................................11.1设计前期调研..................................................................................................11.1.1码垛机器人的定义.............
工业机器人机箱码垛仿真工作站设计.pdf
目录一、设计思路................................................................................................................11.1设计前期调研..................................................................................................11.1.1码垛机器人的定义.............

基于RobotStudio的机器人码垛工作站仿真研究.pptx
汇报人:目录PARTONERobotStudio的背景和功能RobotStudio在机器人码垛工作站仿真中的应用PARTTWO机器人码垛工作站概述机器人码垛工作站仿真的必要性机器人码垛工作站仿真的实现过程PARTTHREE仿真模型的建立仿真参数的设置仿真结果的分析与评估PARTFOUR仿真结果展示结果分析与讨论对实际应用的指导意义PARTFIVE研究结论研究的局限性与展望THANKYOU
基于RobotStudio的机器人码垛工作站虚拟仿真设计.pdf
基于RobotStudio的机器人码垛工作站虚拟仿真设计摘要:本文介绍了基于RobotStudio的机器人码垛工作站虚拟仿真设计。该设计主要应用于工厂生产线上的码垛工作,以提高生产效率和产品质量为目标,实现了自动换盒和错误检测的功能。通过虚拟仿真,可以降低实际建设成本,同时保证设计方案的效果。本文详细阐述了机器人码垛工作站的整体设计思路、工作流程、仿真模拟结果以及未来的拓展方向。关键词:RobotStudio;机器人;码垛;自动换盒;错误检测正文:一、研究背景传统的码垛工作需要人工操作,效率低、出错率高,