
一种基于热成像相机的非视域成像装置及其方法.pdf

靖烟****魔王

1/9
2/9
3/9
4/9
5/9
6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于热成像相机的非视域成像装置及其方法.pdf
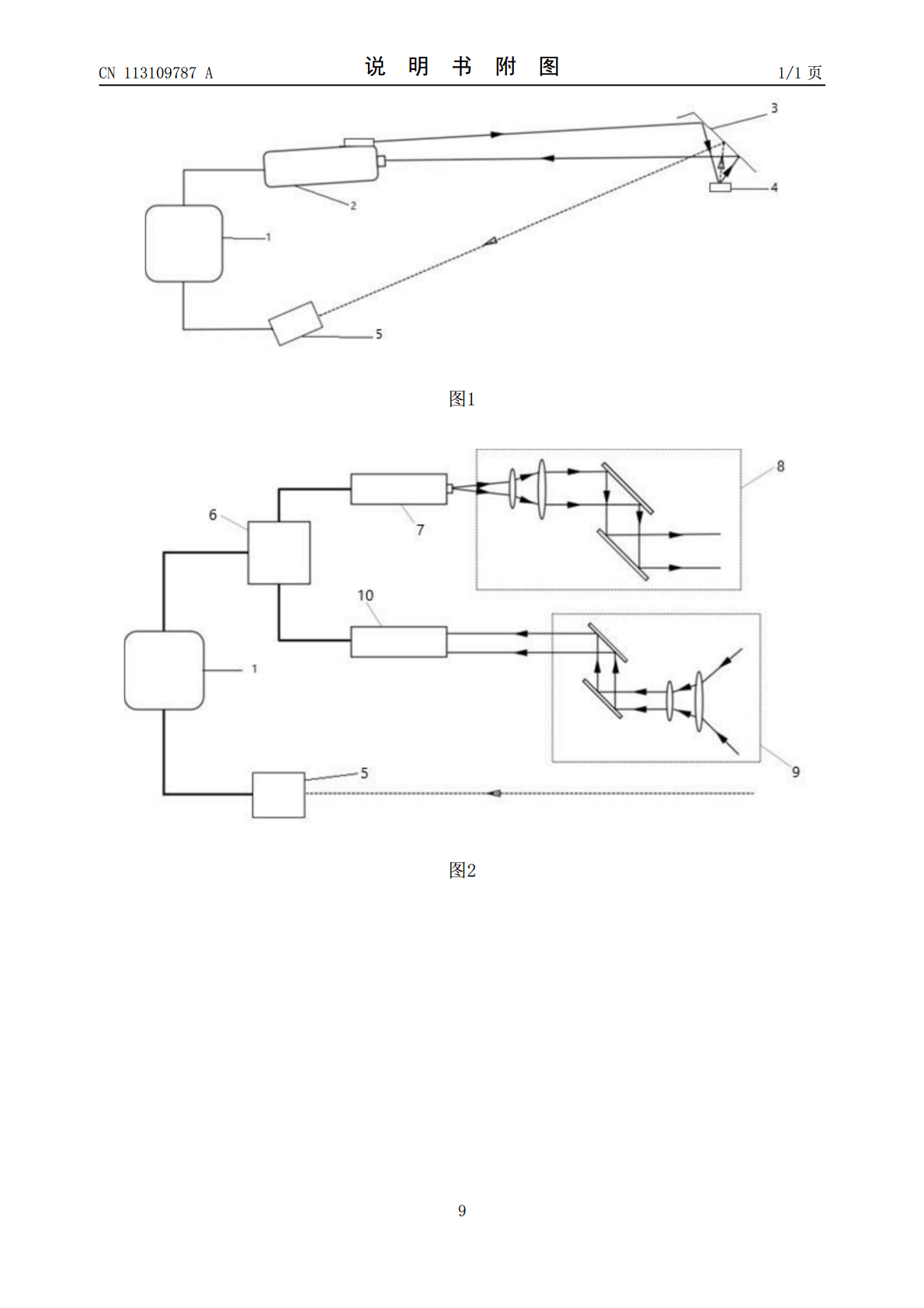
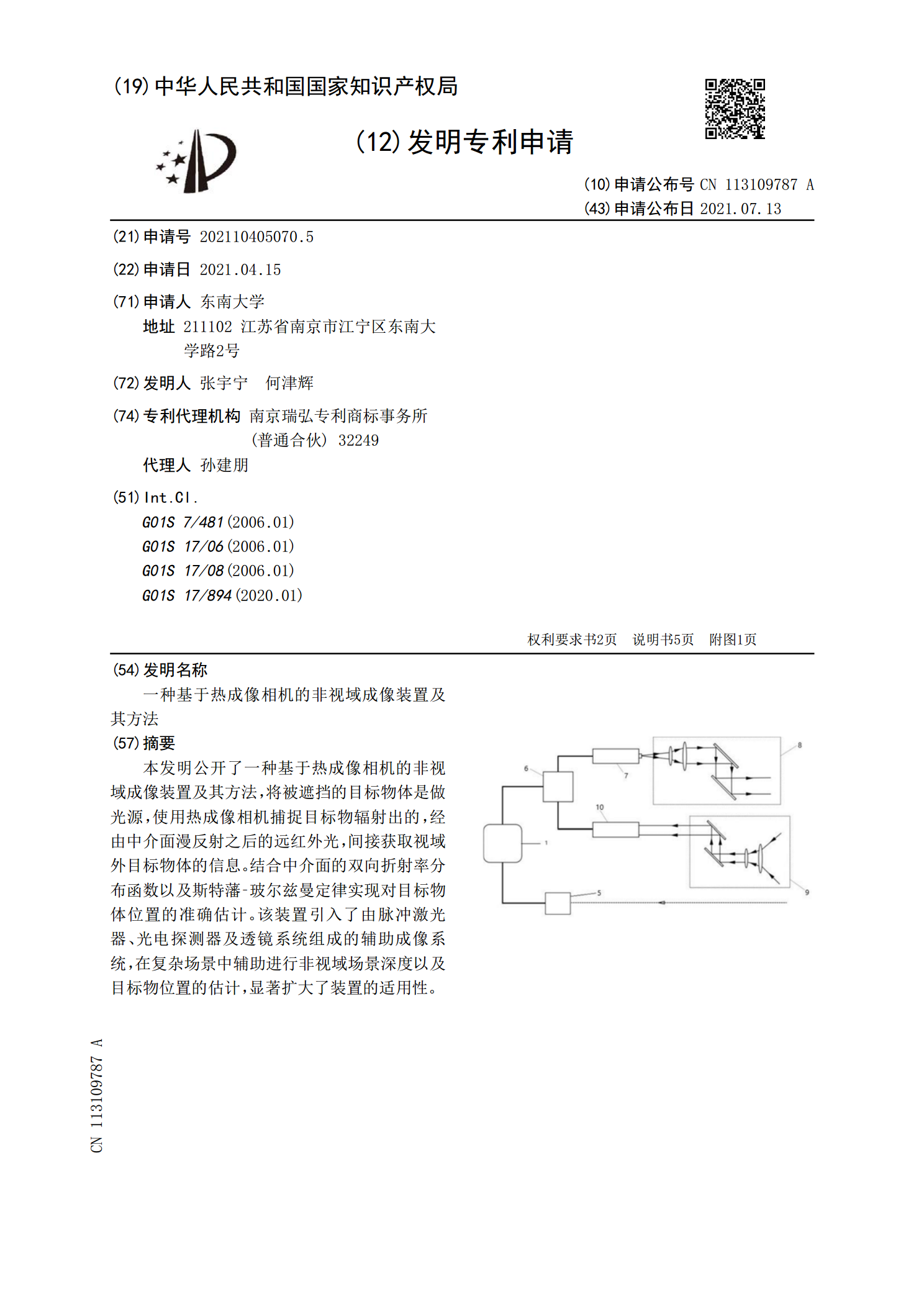
本发明公开了一种基于热成像相机的非视域成像装置及其方法,将被遮挡的目标物体是做光源,使用热成像相机捕捉目标物辐射出的,经由中介面漫反射之后的远红外光,间接获取视域外目标物体的信息。结合中介面的双向折射率分布函数以及斯特藩‑玻尔兹曼定律实现对目标物体位置的准确估计。该装置引入了由脉冲激光器、光电探测器及透镜系统组成的辅助成像系统,在复杂场景中辅助进行非视域场景深度以及目标物位置的估计,显著扩大了装置的适用性。
一种非视域成像系统及成像方法.pdf
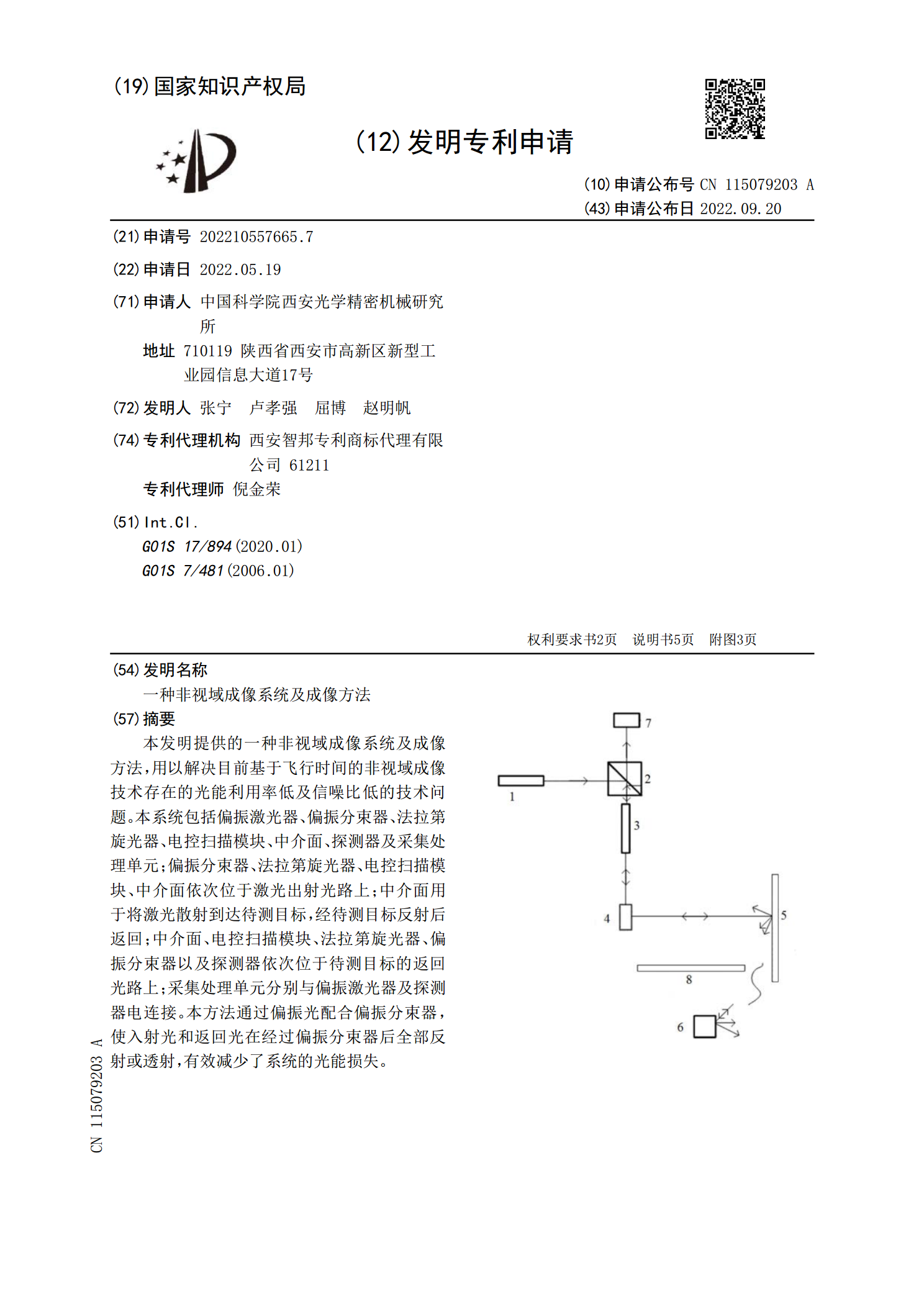
本发明提供的一种非视域成像系统及成像方法,用以解决目前基于飞行时间的非视域成像技术存在的光能利用率低及信噪比低的技术问题。本系统包括偏振激光器、偏振分束器、法拉第旋光器、电控扫描模块、中介面、探测器及采集处理单元;偏振分束器、法拉第旋光器、电控扫描模块、中介面依次位于激光出射光路上;中介面用于将激光散射到达待测目标,经待测目标反射后返回;中介面、电控扫描模块、法拉第旋光器、偏振分束器以及探测器依次位于待测目标的返回光路上;采集处理单元分别与偏振激光器及探测器电连接。本方法通过偏振光配合偏振分束器,使入射光
热成像装置和热成像方法.pdf
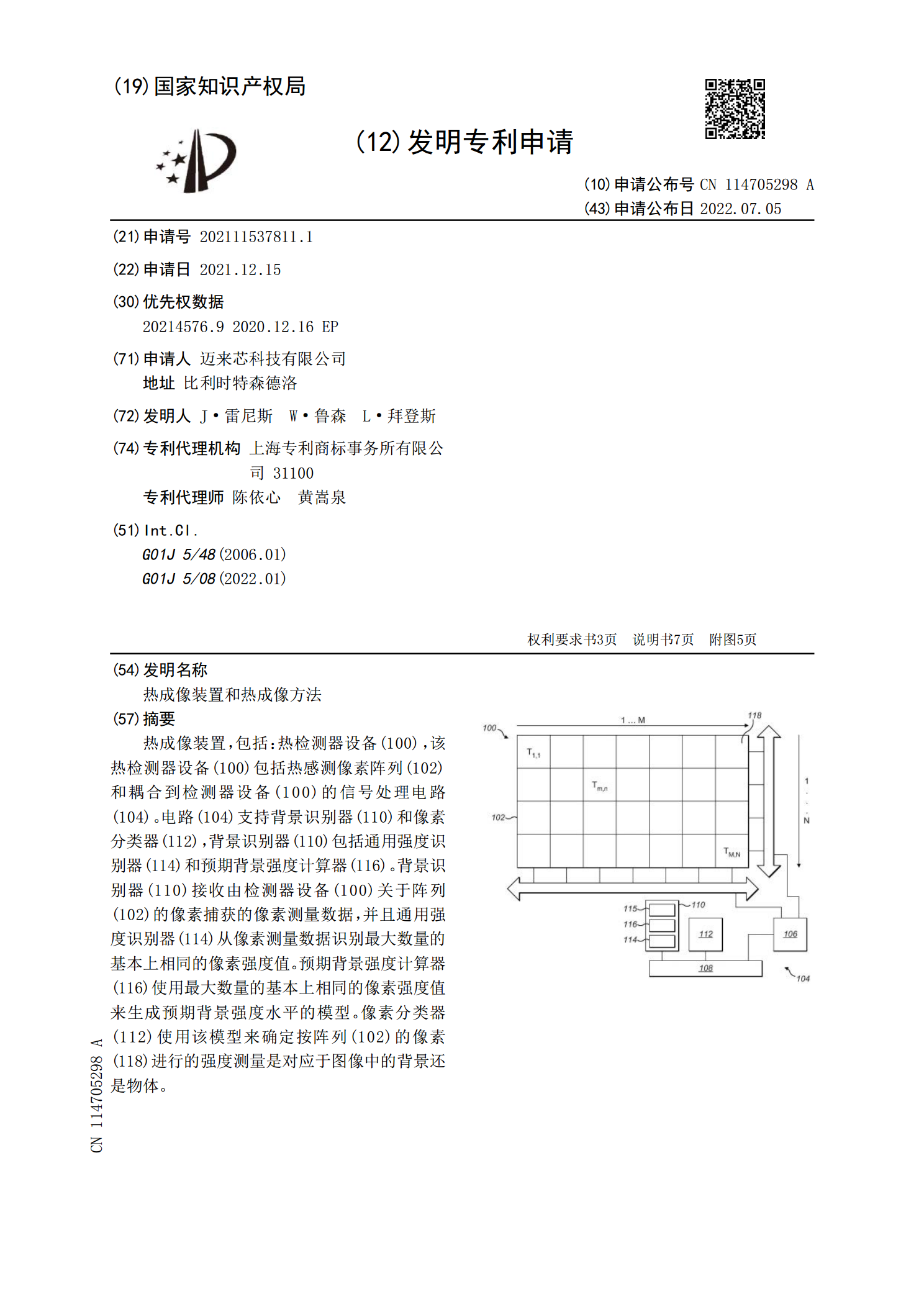
热成像装置,包括:热检测器设备(100),该热检测器设备(100)包括热感测像素阵列(102)和耦合到检测器设备(100)的信号处理电路(104)。电路(104)支持背景识别器(110)和像素分类器(112),背景识别器(110)包括通用强度识别器(114)和预期背景强度计算器(116)。背景识别器(110)接收由检测器设备(100)关于阵列(102)的像素捕获的像素测量数据,并且通用强度识别器(114)从像素测量数据识别最大数量的基本上相同的像素强度值。预期背景强度计算器(116)使用最大数量的基本上相
基于光强互关联的非视域成像方法.pdf
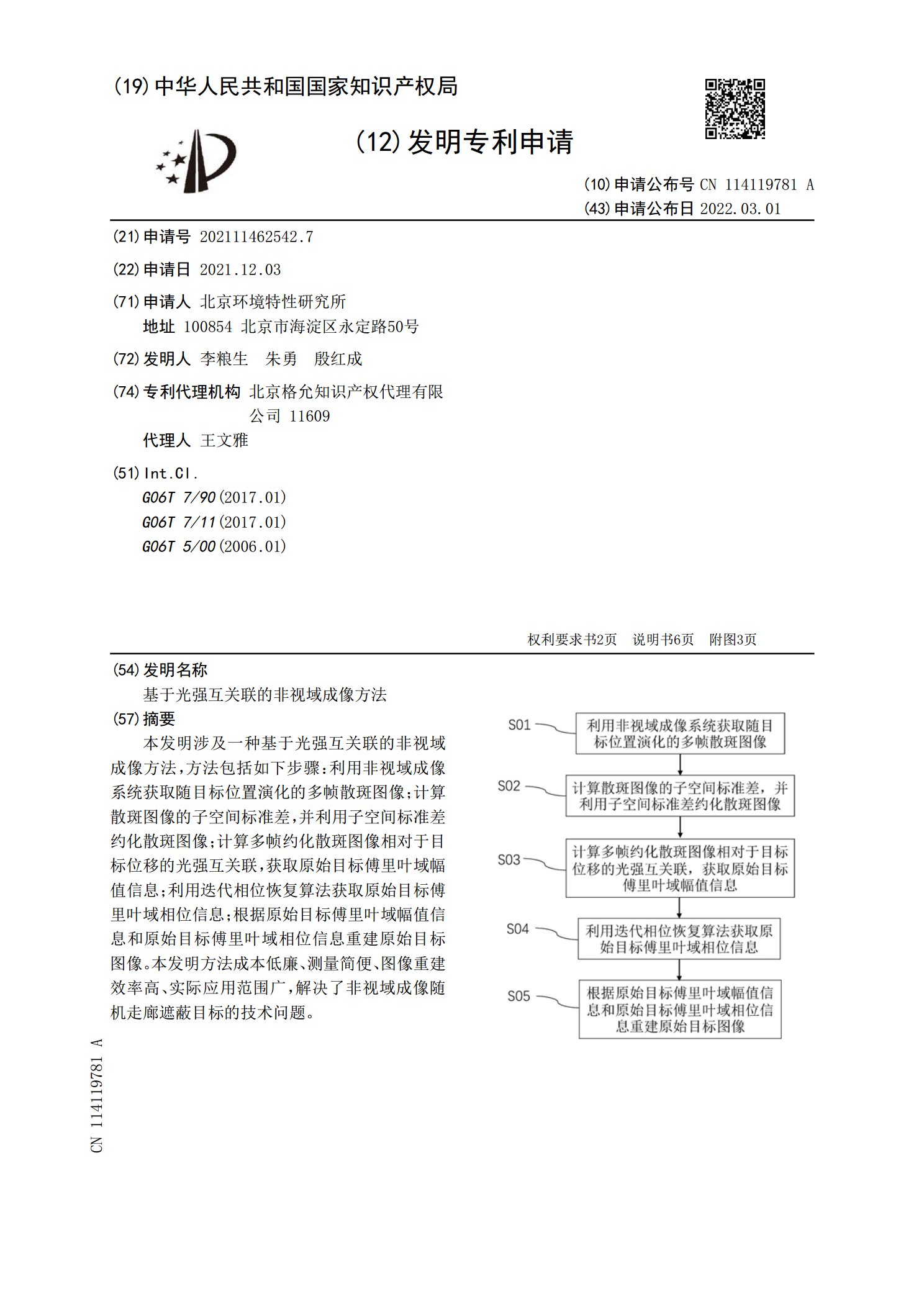
本发明涉及一种基于光强互关联的非视域成像方法,方法包括如下步骤:利用非视域成像系统获取随目标位置演化的多帧散斑图像;计算散斑图像的子空间标准差,并利用子空间标准差约化散斑图像;计算多帧约化散斑图像相对于目标位移的光强互关联,获取原始目标傅里叶域幅值信息;利用迭代相位恢复算法获取原始目标傅里叶域相位信息;根据原始目标傅里叶域幅值信息和原始目标傅里叶域相位信息重建原始目标图像。本发明方法成本低廉、测量简便、图像重建效率高、实际应用范围广,解决了非视域成像随机走廊遮蔽目标的技术问题。
相机成像方法及相机装置.pdf
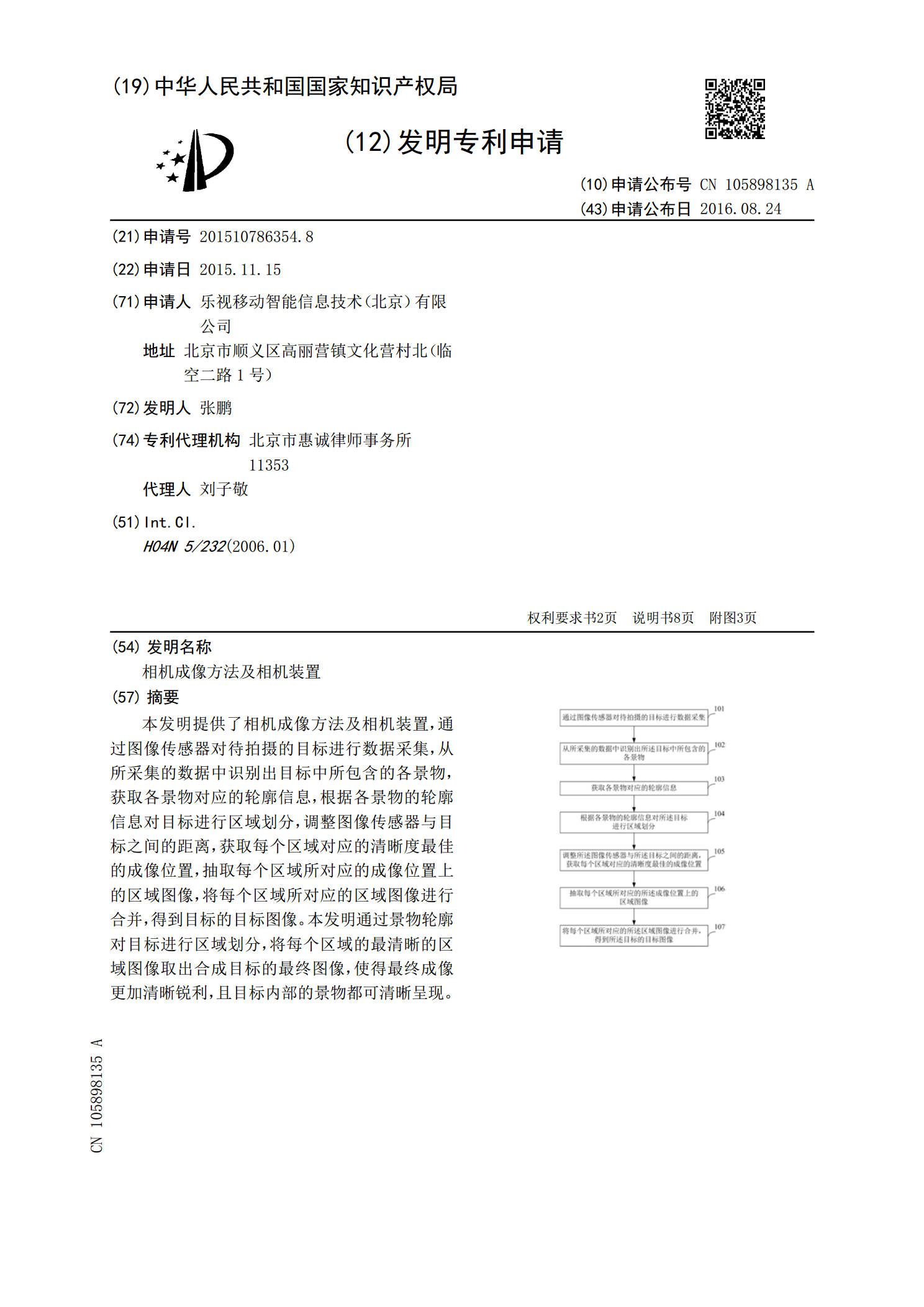
本发明提供了相机成像方法及相机装置,通过图像传感器对待拍摄的目标进行数据采集,从所采集的数据中识别出目标中所包含的各景物,获取各景物对应的轮廓信息,根据各景物的轮廓信息对目标进行区域划分,调整图像传感器与目标之间的距离,获取每个区域对应的清晰度最佳的成像位置,抽取每个区域所对应的成像位置上的区域图像,将每个区域所对应的区域图像进行合并,得到目标的目标图像。本发明通过景物轮廓对目标进行区域划分,将每个区域的最清晰的区域图像取出合成目标的最终图像,使得最终成像更加清晰锐利,且目标内部的景物都可清晰呈现。