
相机成像方法及相机装置.pdf

是湛****21

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
相机成像方法及相机装置.pdf
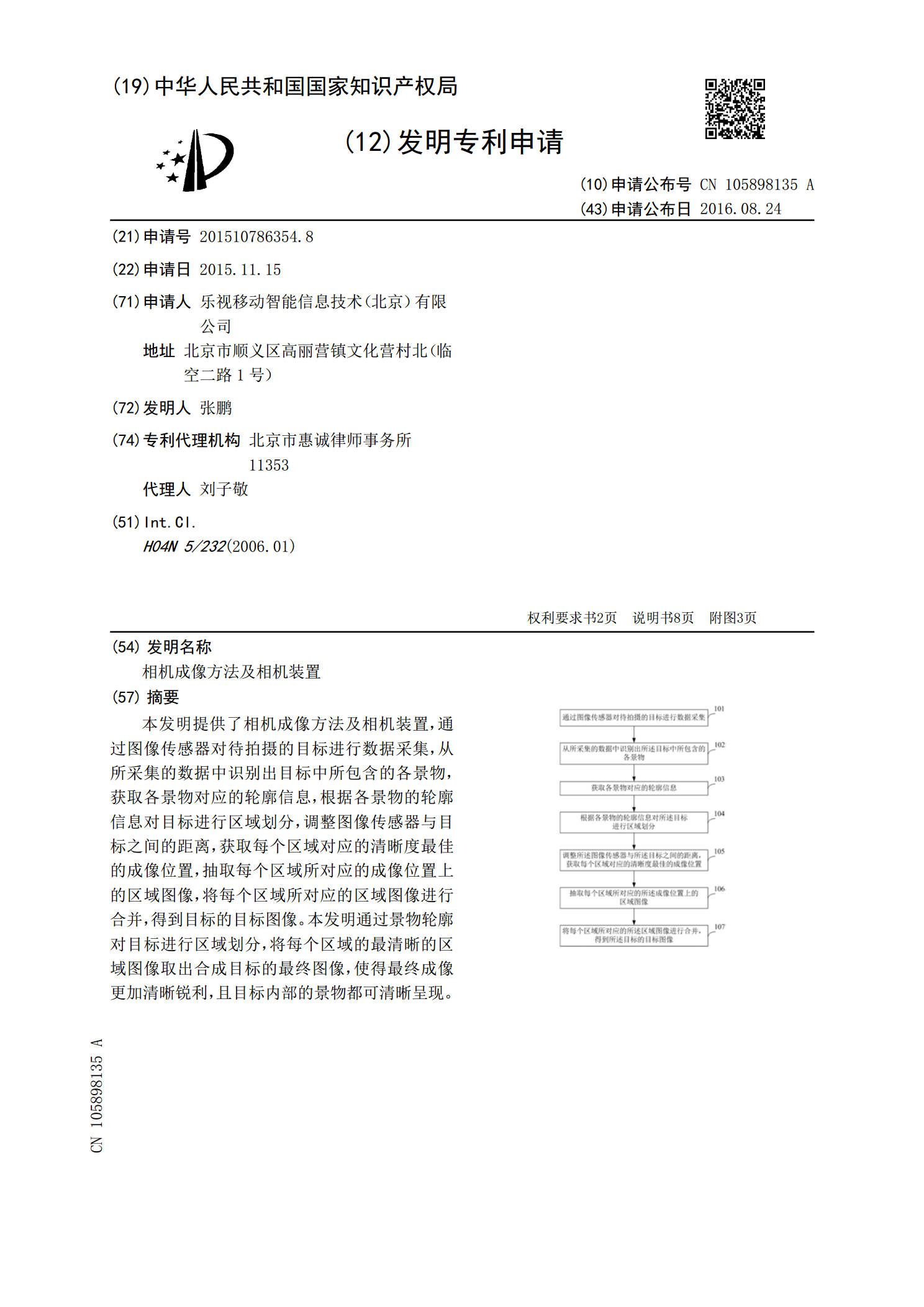
本发明提供了相机成像方法及相机装置,通过图像传感器对待拍摄的目标进行数据采集,从所采集的数据中识别出目标中所包含的各景物,获取各景物对应的轮廓信息,根据各景物的轮廓信息对目标进行区域划分,调整图像传感器与目标之间的距离,获取每个区域对应的清晰度最佳的成像位置,抽取每个区域所对应的成像位置上的区域图像,将每个区域所对应的区域图像进行合并,得到目标的目标图像。本发明通过景物轮廓对目标进行区域划分,将每个区域的最清晰的区域图像取出合成目标的最终图像,使得最终成像更加清晰锐利,且目标内部的景物都可清晰呈现。

线扫相机全景成像装置.pdf
本发明公开了一种线扫相机全景成像装置,包括壳体;驱动电机,固定在壳体内;旋转平台,一端具有固定相机的支架,另一端具有平衡块;传动轴,通过传动轴承与壳体固定,一轴端与所述旋平台位于支架和平衡块间的部分固定;传动齿轮组,安装于壳体且传动驱动电机的电机轴与所述传动轴;中央处理器,安装于壳体内,处理由相机输出的图像信号以及控制驱动电机转动。本发明提供使用线阵相机在运动过程中,360度全景成像/拍摄视频的方法,且能够保证拍摄的图像/视频不变形,且分辨率高;其在旋转平台高速转动时,保证相机的平衡;其由传动轴以及传动齿
成像镜头模块、相机模块及电子装置.pdf
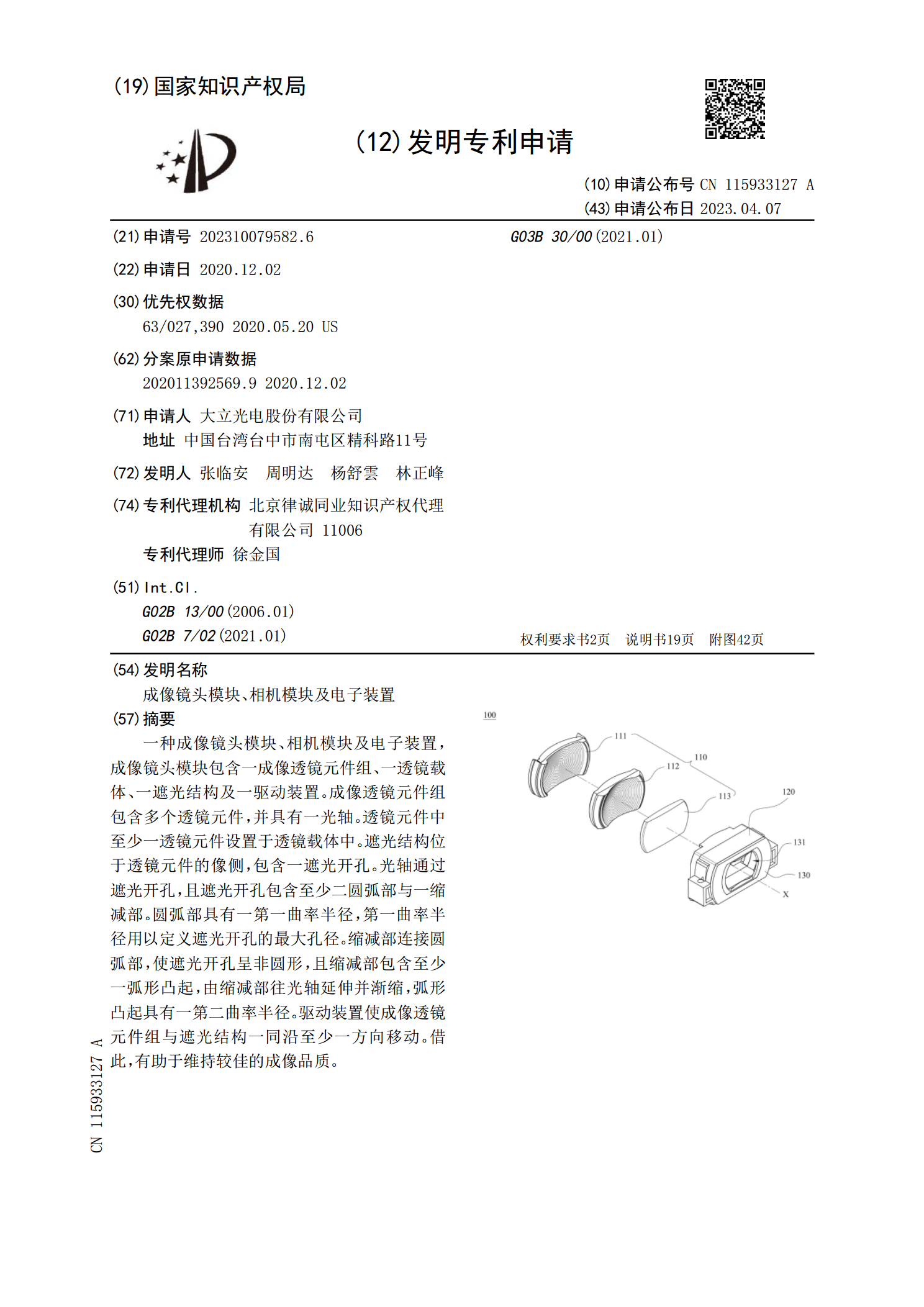
一种成像镜头模块、相机模块及电子装置,成像镜头模块包含一成像透镜元件组、一透镜载体、一遮光结构及一驱动装置。成像透镜元件组包含多个透镜元件,并具有一光轴。透镜元件中至少一透镜元件设置于透镜载体中。遮光结构位于透镜元件的像侧,包含一遮光开孔。光轴通过遮光开孔,且遮光开孔包含至少二圆弧部与一缩减部。圆弧部具有一第一曲率半径,第一曲率半径用以定义遮光开孔的最大孔径。缩减部连接圆弧部,使遮光开孔呈非圆形,且缩减部包含至少一弧形凸起,由缩减部往光轴延伸并渐缩,弧形凸起具有一第二曲率半径。驱动装置使成像透镜元件组与遮
成像镜头模块、相机模块及电子装置.pdf
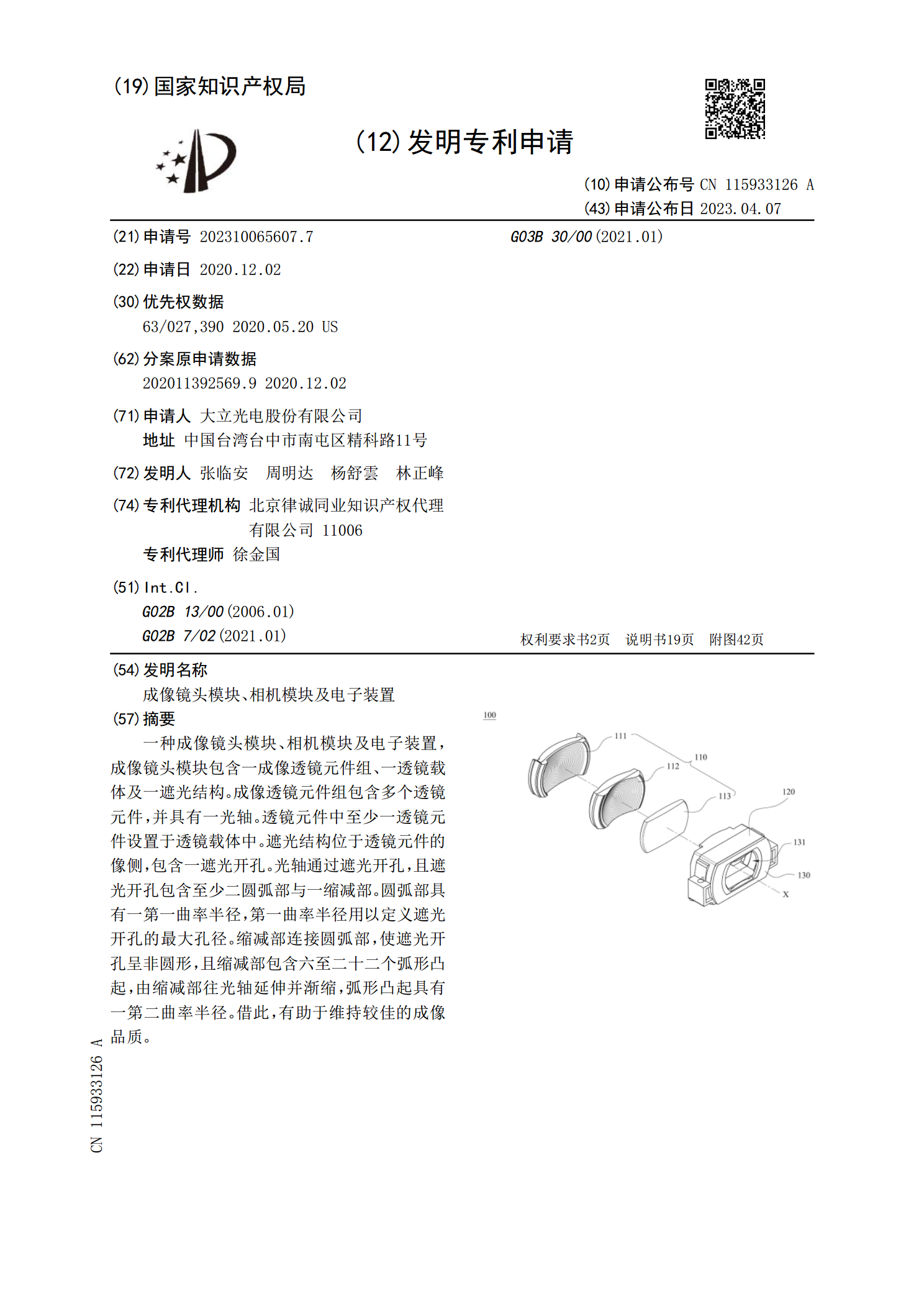
一种成像镜头模块、相机模块及电子装置,成像镜头模块包含一成像透镜元件组、一透镜载体及一遮光结构。成像透镜元件组包含多个透镜元件,并具有一光轴。透镜元件中至少一透镜元件设置于透镜载体中。遮光结构位于透镜元件的像侧,包含一遮光开孔。光轴通过遮光开孔,且遮光开孔包含至少二圆弧部与一缩减部。圆弧部具有一第一曲率半径,第一曲率半径用以定义遮光开孔的最大孔径。缩减部连接圆弧部,使遮光开孔呈非圆形,且缩减部包含六至二十二个弧形凸起,由缩减部往光轴延伸并渐缩,弧形凸起具有一第二曲率半径。借此,有助于维持较佳的成像品质。
成像镜头模块、相机模块及电子装置.pdf
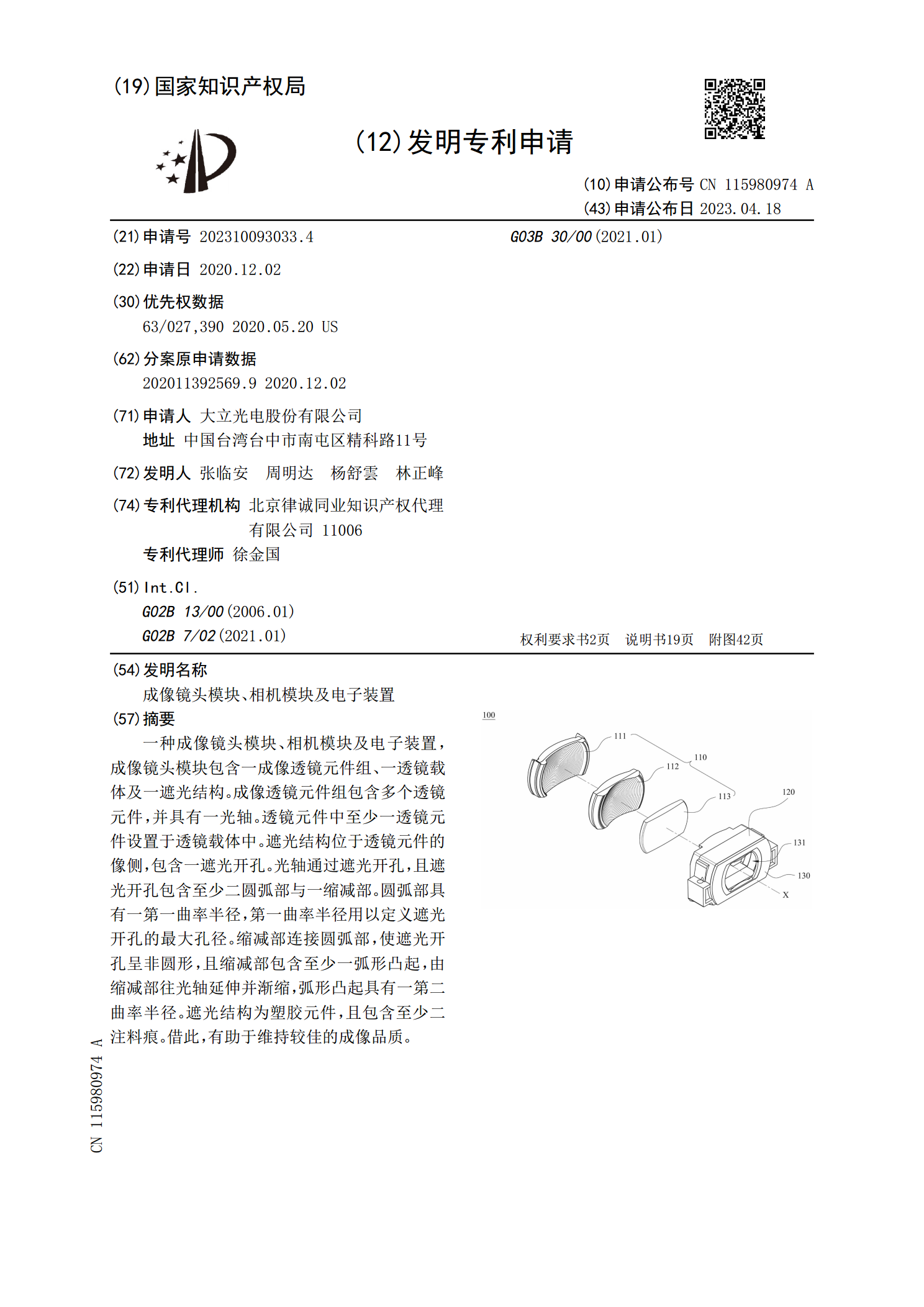
一种成像镜头模块、相机模块及电子装置,成像镜头模块包含一成像透镜元件组、一透镜载体及一遮光结构。成像透镜元件组包含多个透镜元件,并具有一光轴。透镜元件中至少一透镜元件设置于透镜载体中。遮光结构位于透镜元件的像侧,包含一遮光开孔。光轴通过遮光开孔,且遮光开孔包含至少二圆弧部与一缩减部。圆弧部具有一第一曲率半径,第一曲率半径用以定义遮光开孔的最大孔径。缩减部连接圆弧部,使遮光开孔呈非圆形,且缩减部包含至少一弧形凸起,由缩减部往光轴延伸并渐缩,弧形凸起具有一第二曲率半径。遮光结构为塑胶元件,且包含至少二注料痕。