
一种基于特征共识性的目标追踪眼镜及方法.pdf

文宣****66

1/8
2/8

3/8

4/8

5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于特征共识性的目标追踪眼镜及方法.pdf
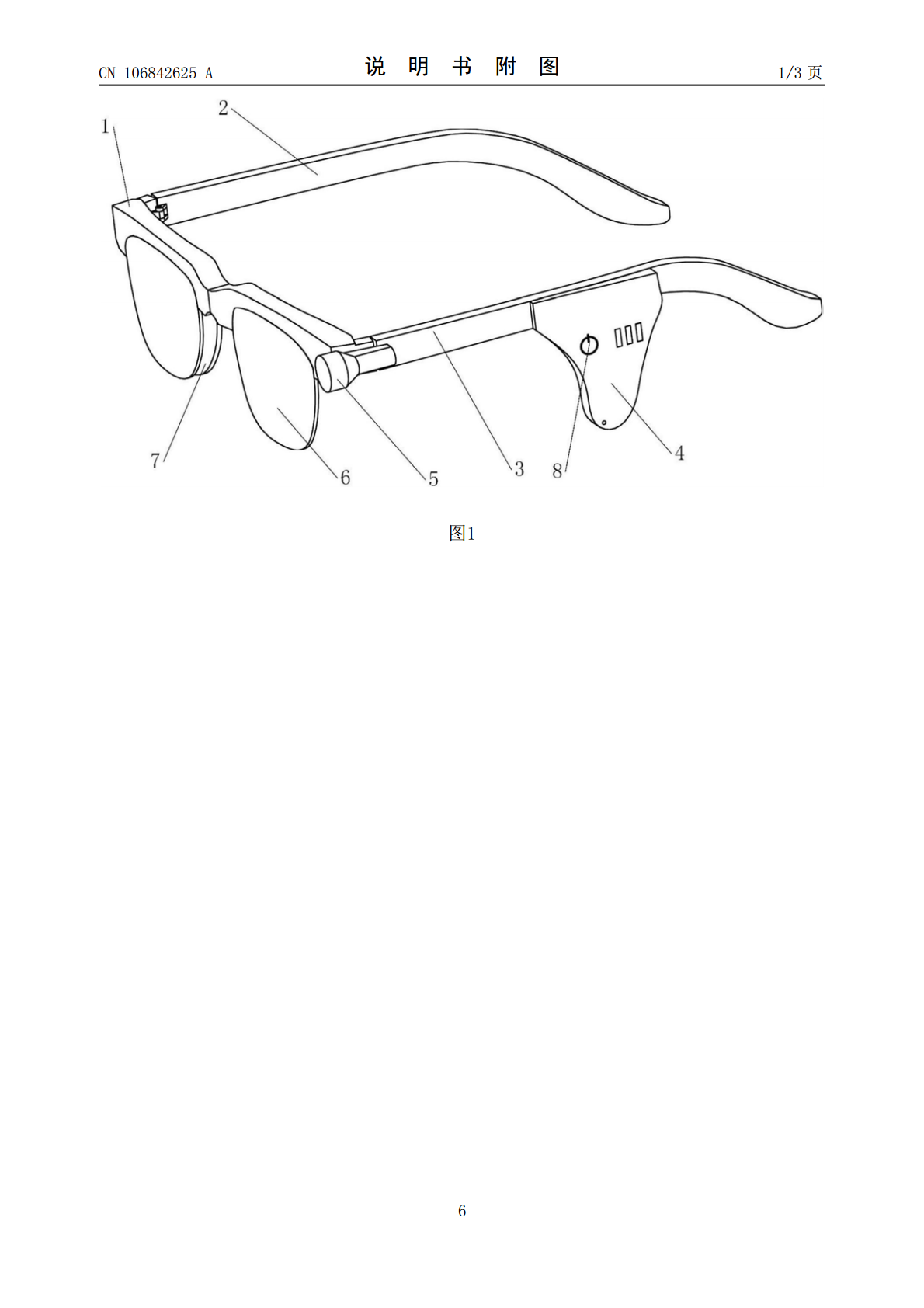
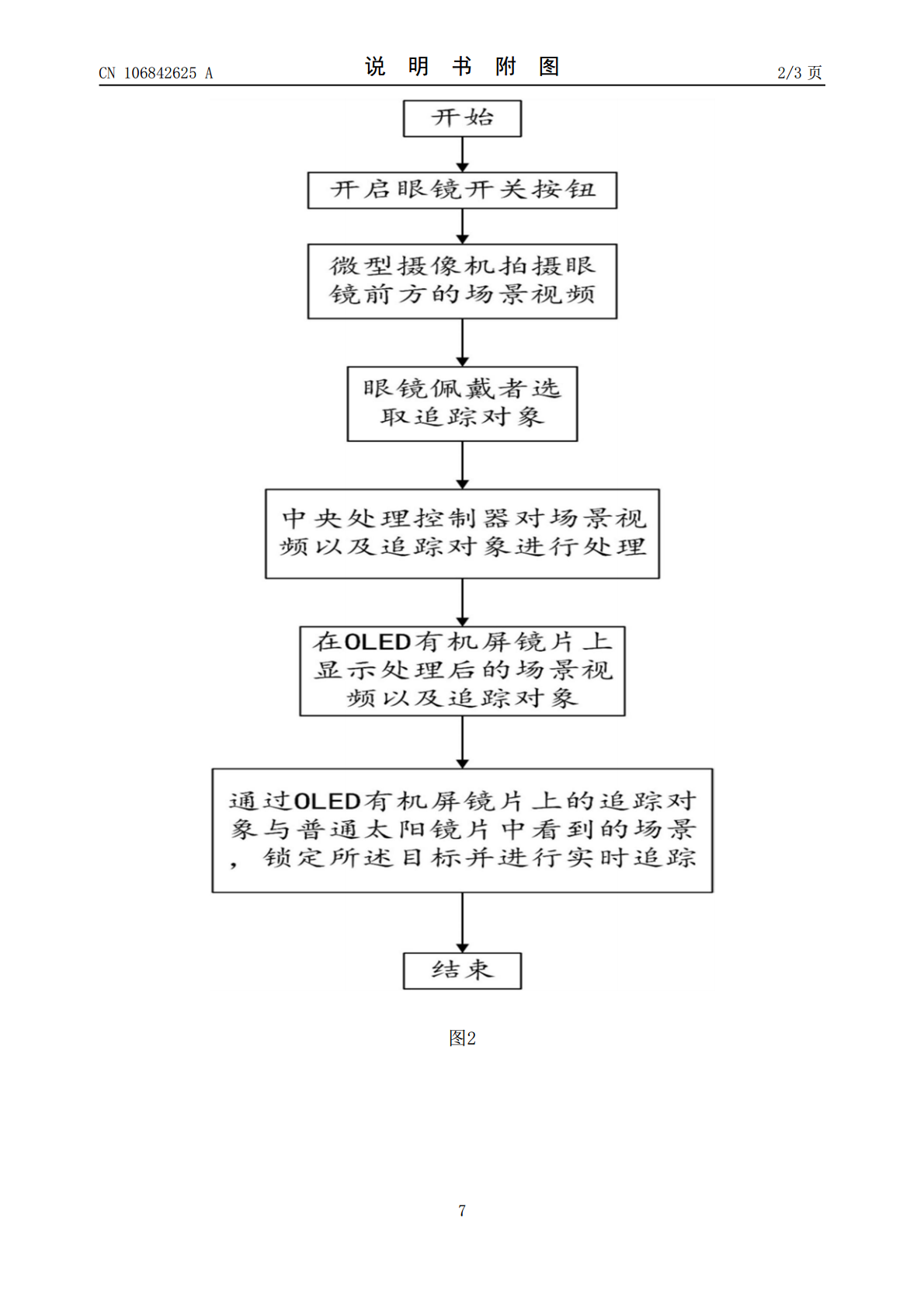
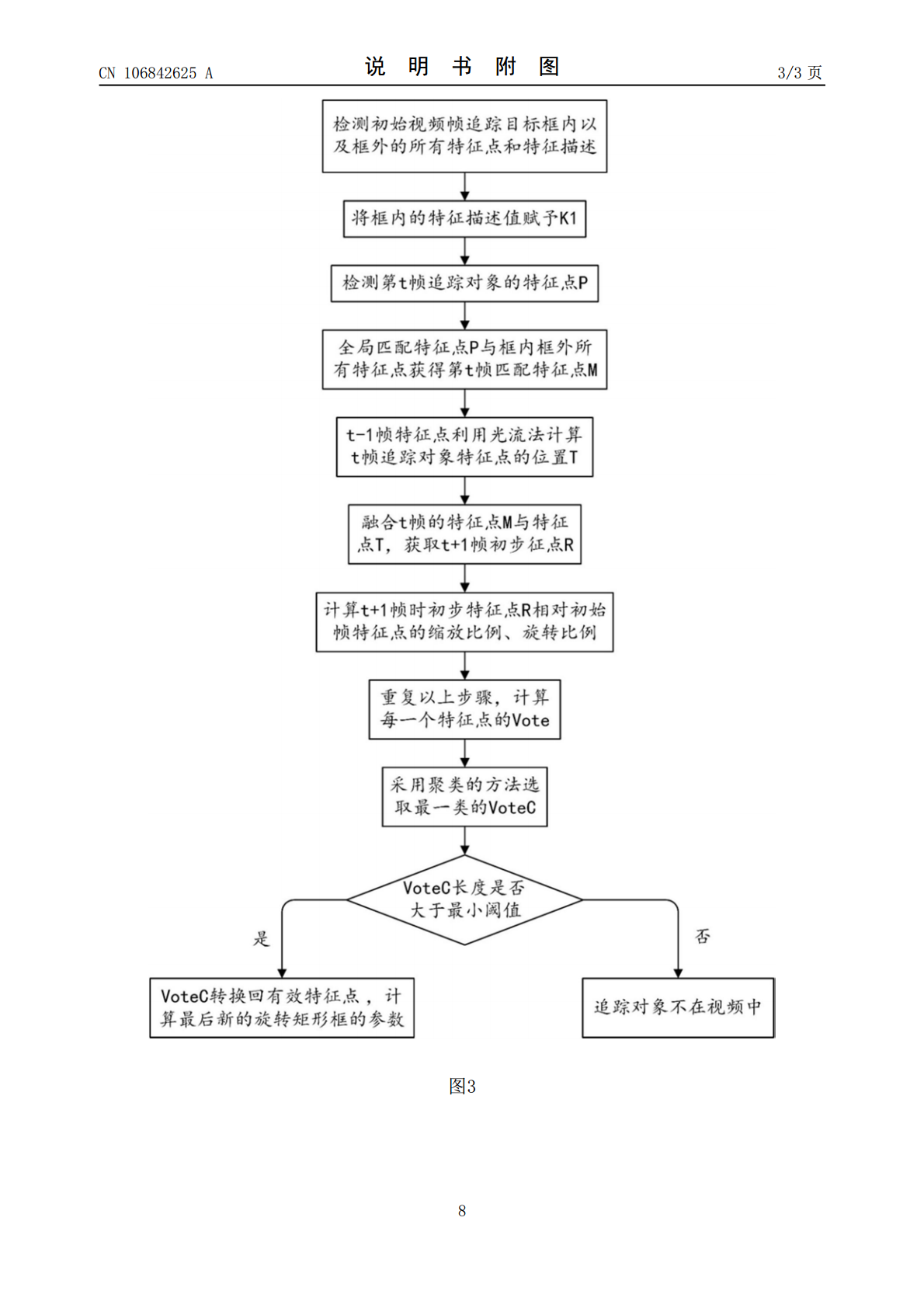
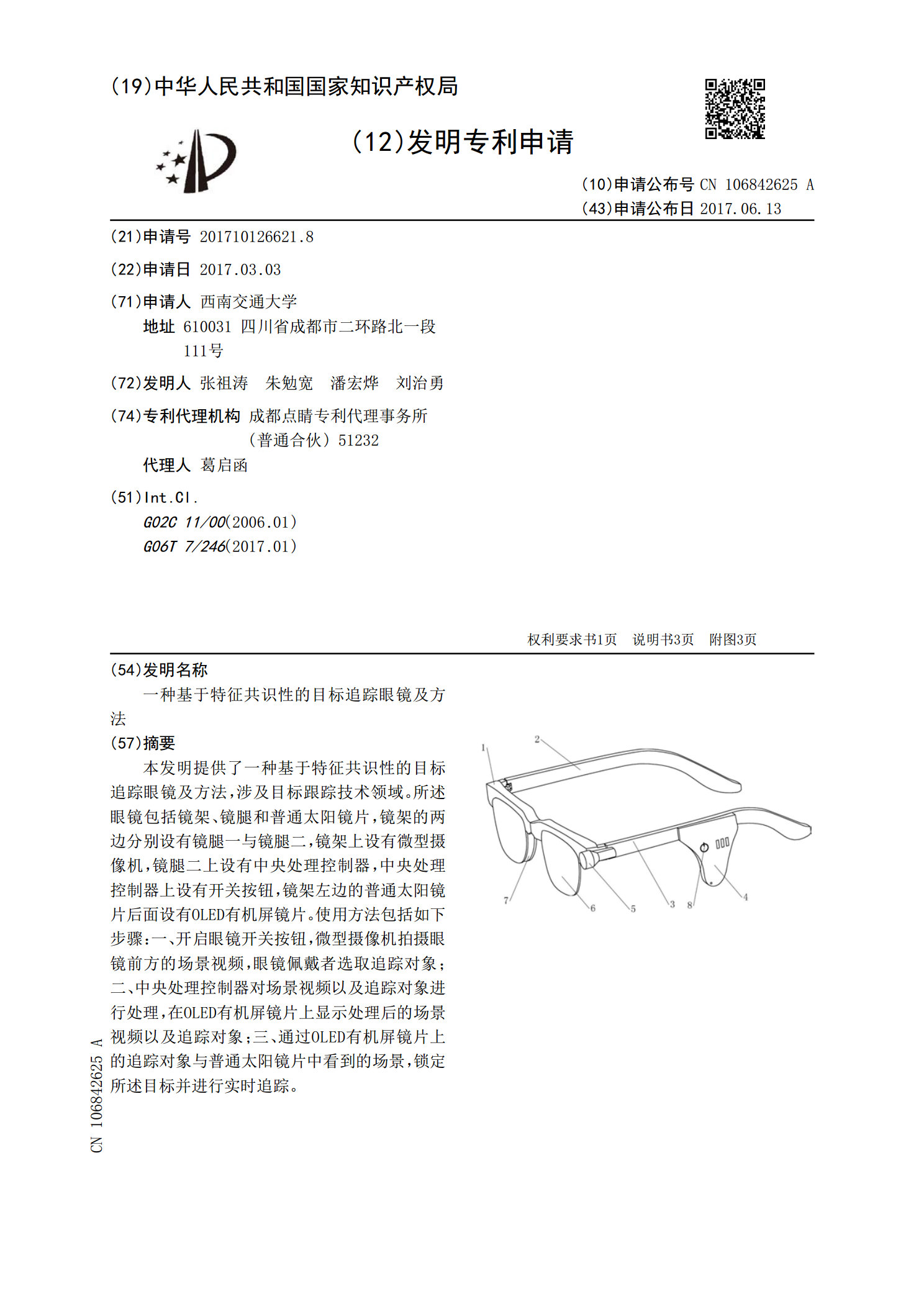
本发明提供了一种基于特征共识性的目标追踪眼镜及方法,涉及目标跟踪技术领域。所述眼镜包括镜架、镜腿和普通太阳镜片,镜架的两边分别设有镜腿一与镜腿二,镜架上设有微型摄像机,镜腿二上设有中央处理控制器,中央处理控制器上设有开关按钮,镜架左边的普通太阳镜片后面设有OLED有机屏镜片。使用方法包括如下步骤:一、开启眼镜开关按钮,微型摄像机拍摄眼镜前方的场景视频,眼镜佩戴者选取追踪对象;二、中央处理控制器对场景视频以及追踪对象进行处理,在OLED有机屏镜片上显示处理后的场景视频以及追踪对象;三、通过OLED有机屏镜片
一种基于共享特征库的追踪方法.pdf
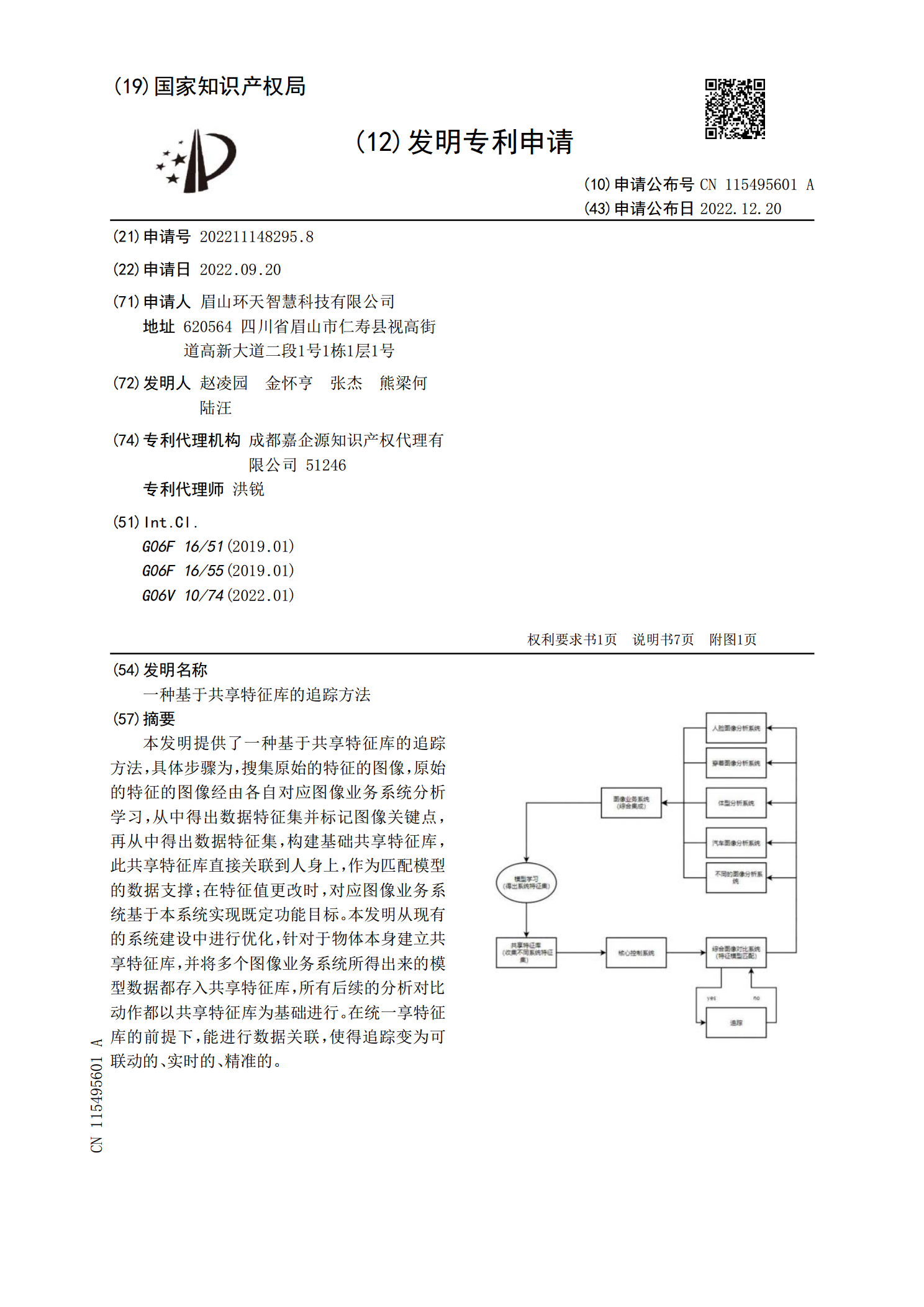
本发明提供了一种基于共享特征库的追踪方法,具体步骤为,搜集原始的特征的图像,原始的特征的图像经由各自对应图像业务系统分析学习,从中得出数据特征集并标记图像关键点,再从中得出数据特征集,构建基础共享特征库,此共享特征库直接关联到人身上,作为匹配模型的数据支撑;在特征值更改时,对应图像业务系统基于本系统实现既定功能目标。本发明从现有的系统建设中进行优化,针对于物体本身建立共享特征库,并将多个图像业务系统所得出来的模型数据都存入共享特征库,所有后续的分析对比动作都以共享特征库为基础进行。在统一享特征库的前提下,
一种对无特征目标的追踪方法.pdf
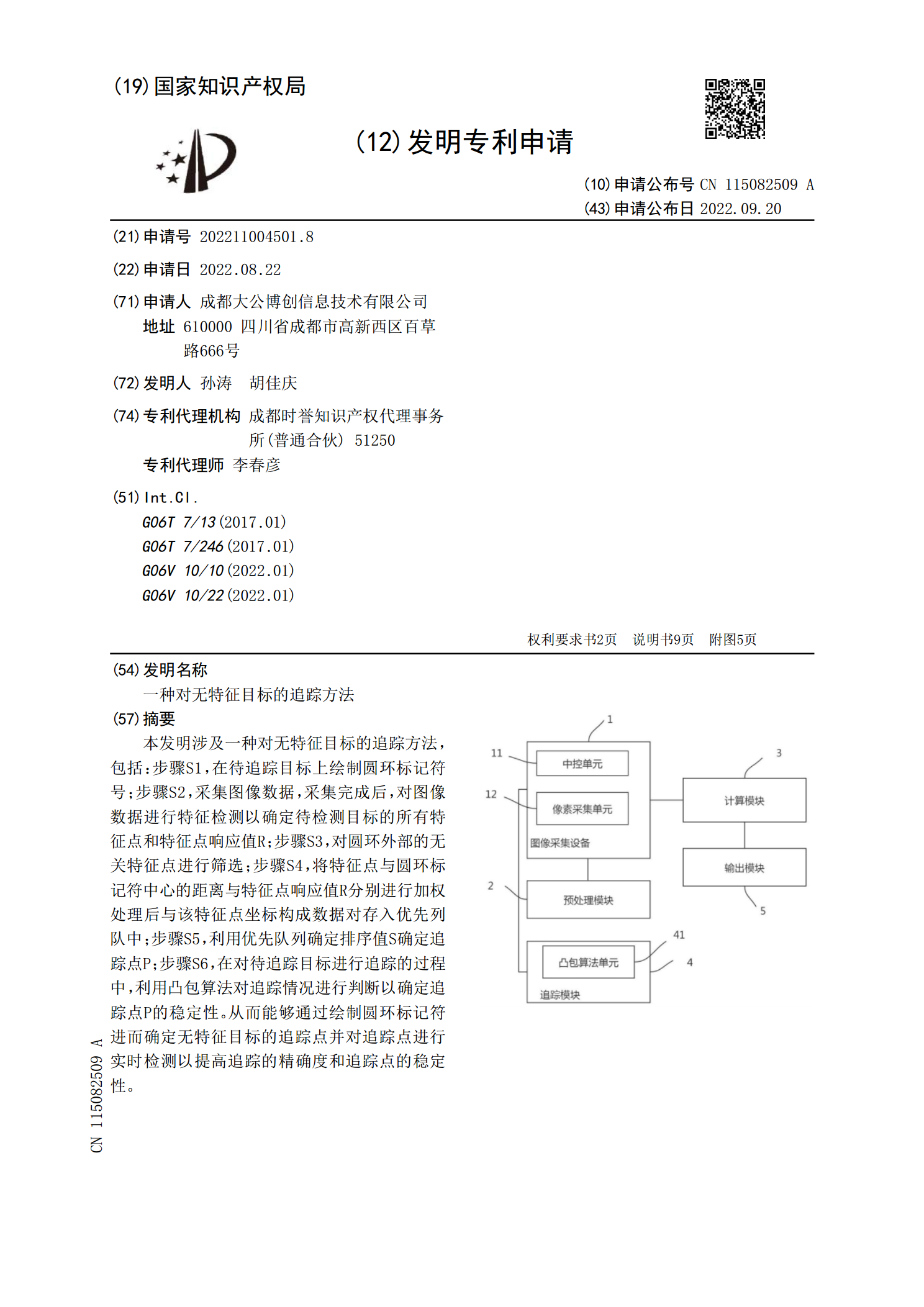
本发明涉及一种对无特征目标的追踪方法,包括:步骤S1,在待追踪目标上绘制圆环标记符号;步骤S2,采集图像数据,采集完成后,对图像数据进行特征检测以确定待检测目标的所有特征点和特征点响应值R;步骤S3,对圆环外部的无关特征点进行筛选;步骤S4,将特征点与圆环标记符中心的距离与特征点响应值R分别进行加权处理后与该特征点坐标构成数据对存入优先列队中;步骤S5,利用优先队列确定排序值S确定追踪点P;步骤S6,在对待追踪目标进行追踪的过程中,利用凸包算法对追踪情况进行判断以确定追踪点P的稳定性。从而能够通过绘制圆环

基于多特征融合的空对地目标检测和追踪方法.docx
基于多特征融合的空对地目标检测和追踪方法摘要:针对传统空对地目标检测和追踪方法存在的问题,本文提出了一种基于多特征融合的新方法。该方法通过综合使用颜色、形状、纹理多个特征来进行目标的检测和追踪,提高了检测和跟踪的准确率和性能。实验结果表明,该方法在空对地目标检测和追踪中具有较好的表现。关键词:空对地目标检测;空对地目标追踪;多特征融合;颜色;形状;纹理。1.绪论随着近年来无人机技术的快速发展,空对地目标检测与追踪得到了大量的关注。空对地目标检测和追踪涉及到计算机视觉、模式识别、机器学习等多个领域,是一个较
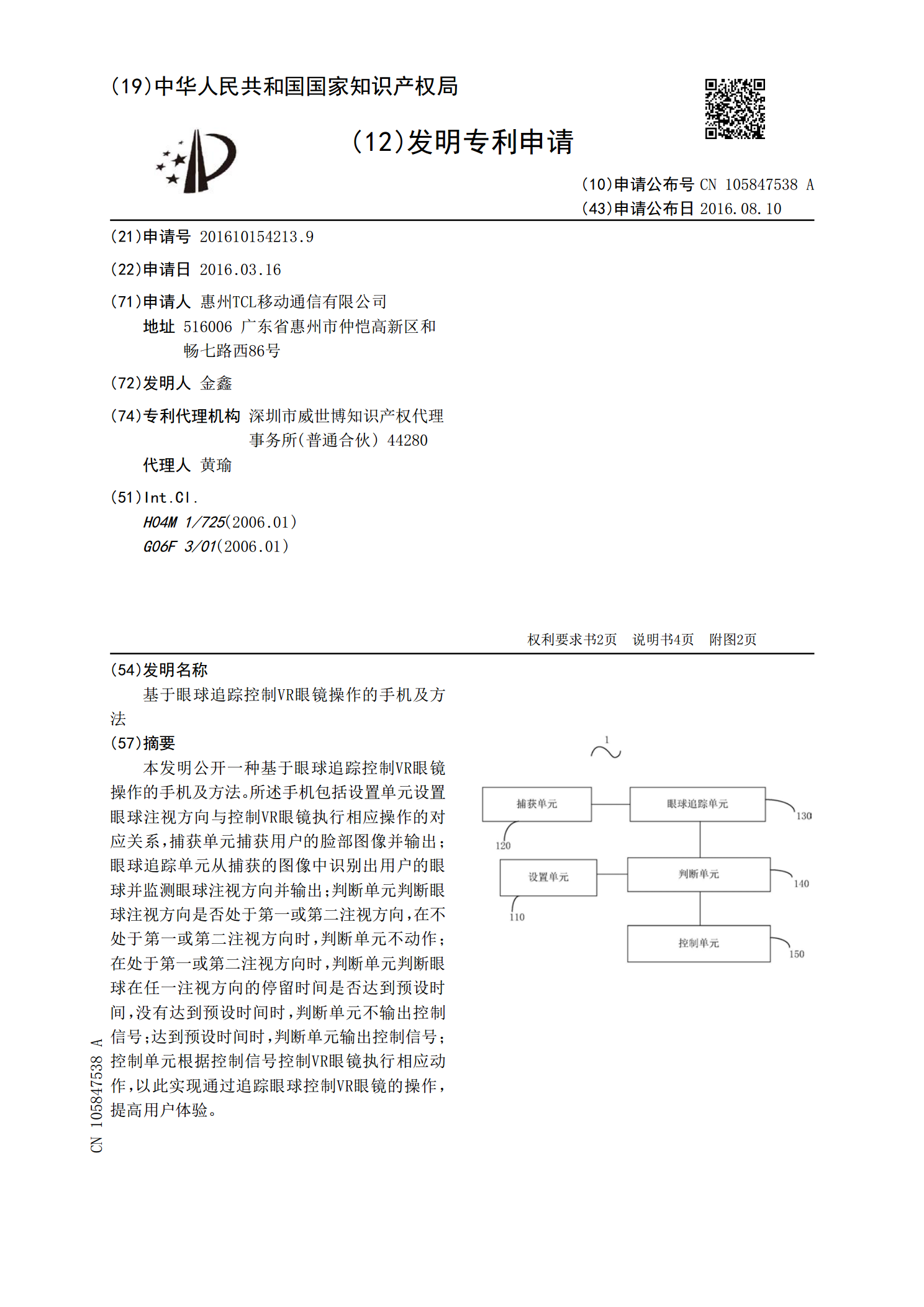
基于眼球追踪控制VR眼镜操作的手机及方法.pdf
本发明公开一种基于眼球追踪控制VR眼镜操作的手机及方法。所述手机包括设置单元设置眼球注视方向与控制VR眼镜执行相应操作的对应关系,捕获单元捕获用户的脸部图像并输出;眼球追踪单元从捕获的图像中识别出用户的眼球并监测眼球注视方向并输出;判断单元判断眼球注视方向是否处于第一或第二注视方向,在不处于第一或第二注视方向时,判断单元不动作;在处于第一或第二注视方向时,判断单元判断眼球在任一注视方向的停留时间是否达到预设时间,没有达到预设时间时,判断单元不输出控制信号;达到预设时间时,判断单元输出控制信号;控制单元根据