
一种智能烹饪机器人及智能烹饪方法.pdf

书生****35


1/10

2/10
3/10
4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能烹饪机器人及智能烹饪方法.pdf
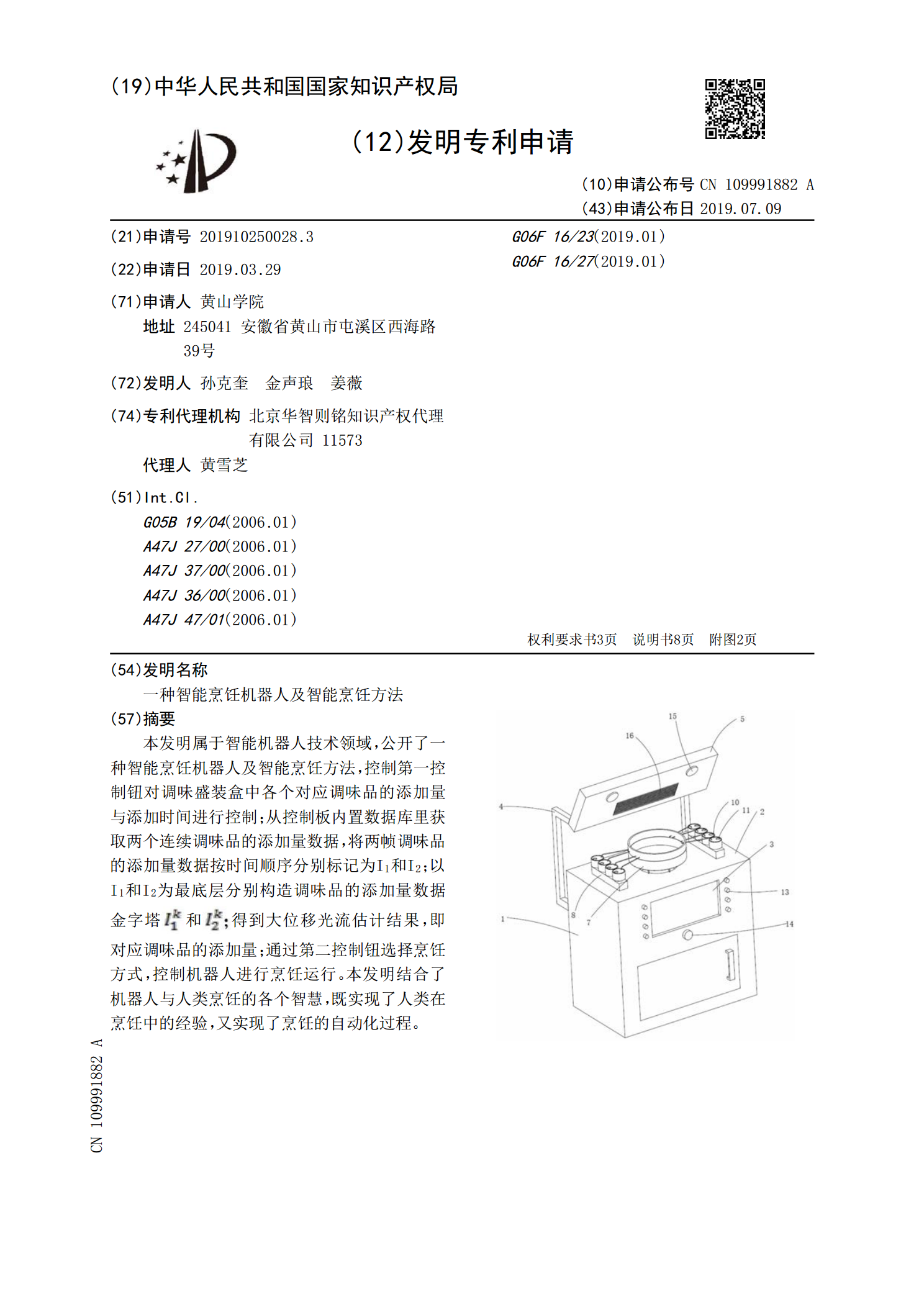
本发明属于智能机器人技术领域,公开了一种智能烹饪机器人及智能烹饪方法,控制第一控制钮对调味盛装盒中各个对应调味品的添加量与添加时间进行控制;从控制板内置数据库里获取两个连续调味品的添加量数据,将两帧调味品的添加量数据按时间顺序分别标记为I
智能烹饪加料方法、智能烹饪系统及智能烹饪设备.pdf
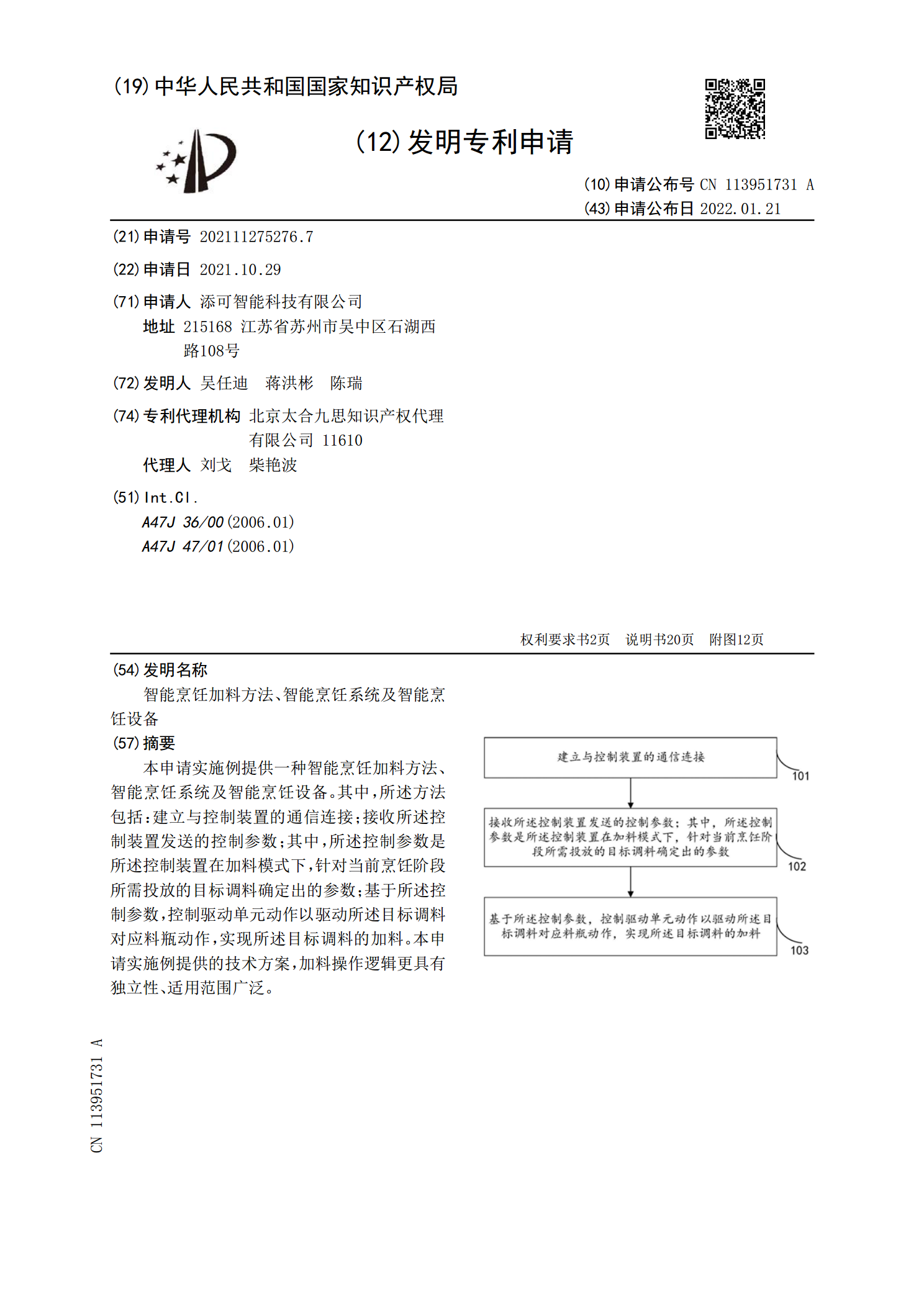
本申请实施例提供一种智能烹饪加料方法、智能烹饪系统及智能烹饪设备。其中,所述方法包括:建立与控制装置的通信连接;接收所述控制装置发送的控制参数;其中,所述控制参数是所述控制装置在加料模式下,针对当前烹饪阶段所需投放的目标调料确定出的参数;基于所述控制参数,控制驱动单元动作以驱动所述目标调料对应料瓶动作,实现所述目标调料的加料。本申请实施例提供的技术方案,加料操作逻辑更具有独立性、适用范围广泛。
一种智能烹饪炉及其智能烹饪方法.pdf
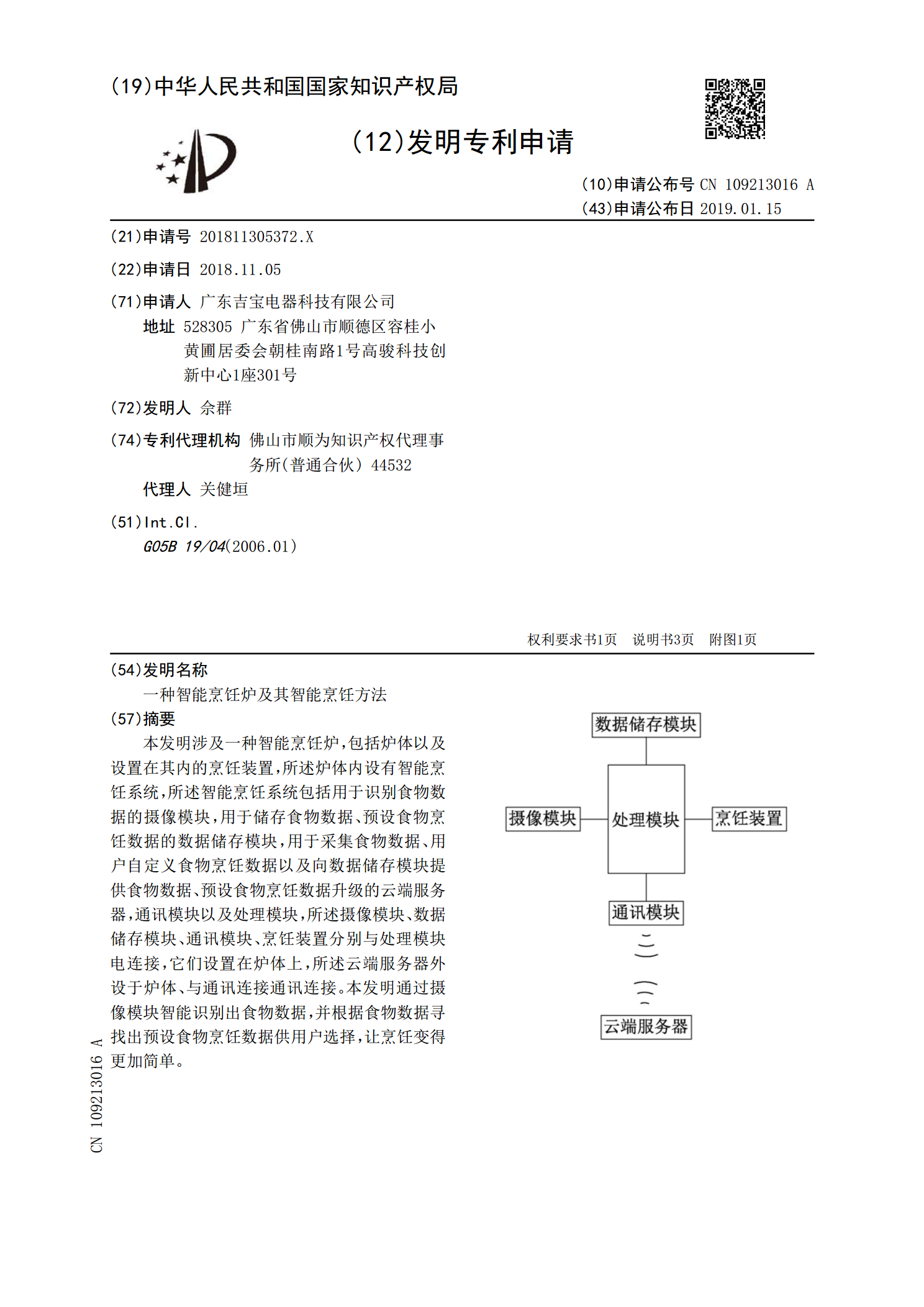
本发明涉及一种智能烹饪炉,包括炉体以及设置在其内的烹饪装置,所述炉体内设有智能烹饪系统,所述智能烹饪系统包括用于识别食物数据的摄像模块,用于储存食物数据、预设食物烹饪数据的数据储存模块,用于采集食物数据、用户自定义食物烹饪数据以及向数据储存模块提供食物数据、预设食物烹饪数据升级的云端服务器,通讯模块以及处理模块,所述摄像模块、数据储存模块、通讯模块、烹饪装置分别与处理模块电连接,它们设置在炉体上,所述云端服务器外设于炉体、与通讯连接通讯连接。本发明通过摄像模块智能识别出食物数据,并根据食物数据寻找出预设食
一种智能烹饪装置及一种智能烹饪方法.pdf
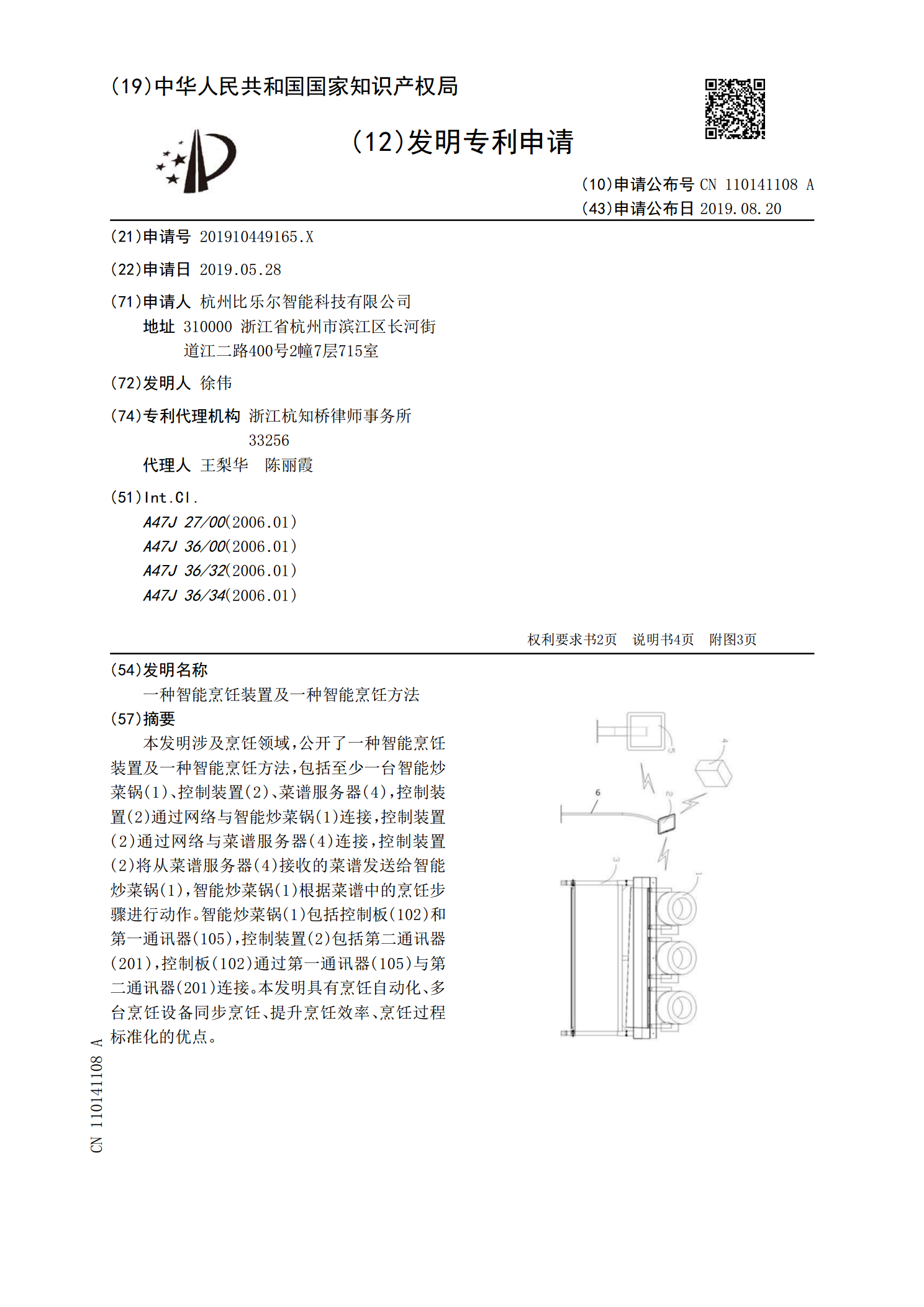
本发明涉及烹饪领域,公开了一种智能烹饪装置及一种智能烹饪方法,包括至少一台智能炒菜锅(1)、控制装置(2)、菜谱服务器(4),控制装置(2)通过网络与智能炒菜锅(1)连接,控制装置(2)通过网络与菜谱服务器(4)连接,控制装置(2)将从菜谱服务器(4)接收的菜谱发送给智能炒菜锅(1),智能炒菜锅(1)根据菜谱中的烹饪步骤进行动作。智能炒菜锅(1)包括控制板(102)和第一通讯器(105),控制装置(2)包括第二通讯器(201),控制板(102)通过第一通讯器(105)与第二通讯器(201)连接。本发明具有
一种智能厨房烹饪系统及智能辅助烹饪的方法.pdf
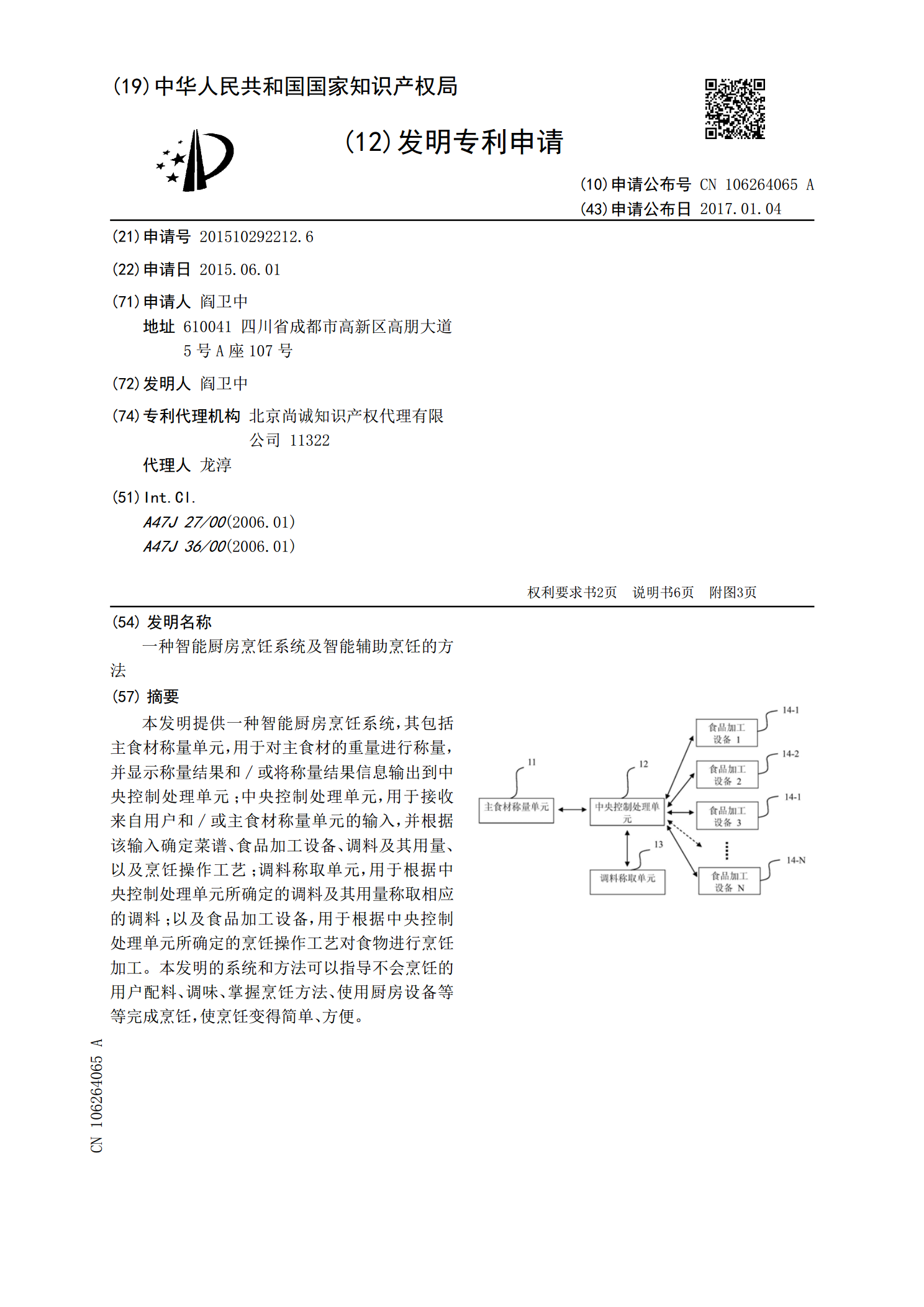
本发明提供一种智能厨房烹饪系统,其包括主食材称量单元,用于对主食材的重量进行称量,并显示称量结果和/或将称量结果信息输出到中央控制处理单元;中央控制处理单元,用于接收来自用户和/或主食材称量单元的输入,并根据该输入确定菜谱、食品加工设备、调料及其用量、以及烹饪操作工艺;调料称取单元,用于根据中央控制处理单元所确定的调料及其用量称取相应的调料;以及食品加工设备,用于根据中央控制处理单元所确定的烹饪操作工艺对食物进行烹饪加工。本发明的系统和方法可以指导不会烹饪的用户配料、调味、掌握烹饪方法、使用厨房设备等等完