
医用起吊式转运机械臂及转运方法.pdf

雨巷****彦峰

1/10
2/10
3/10
4/10

5/10
6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
医用起吊式转运机械臂及转运方法.pdf
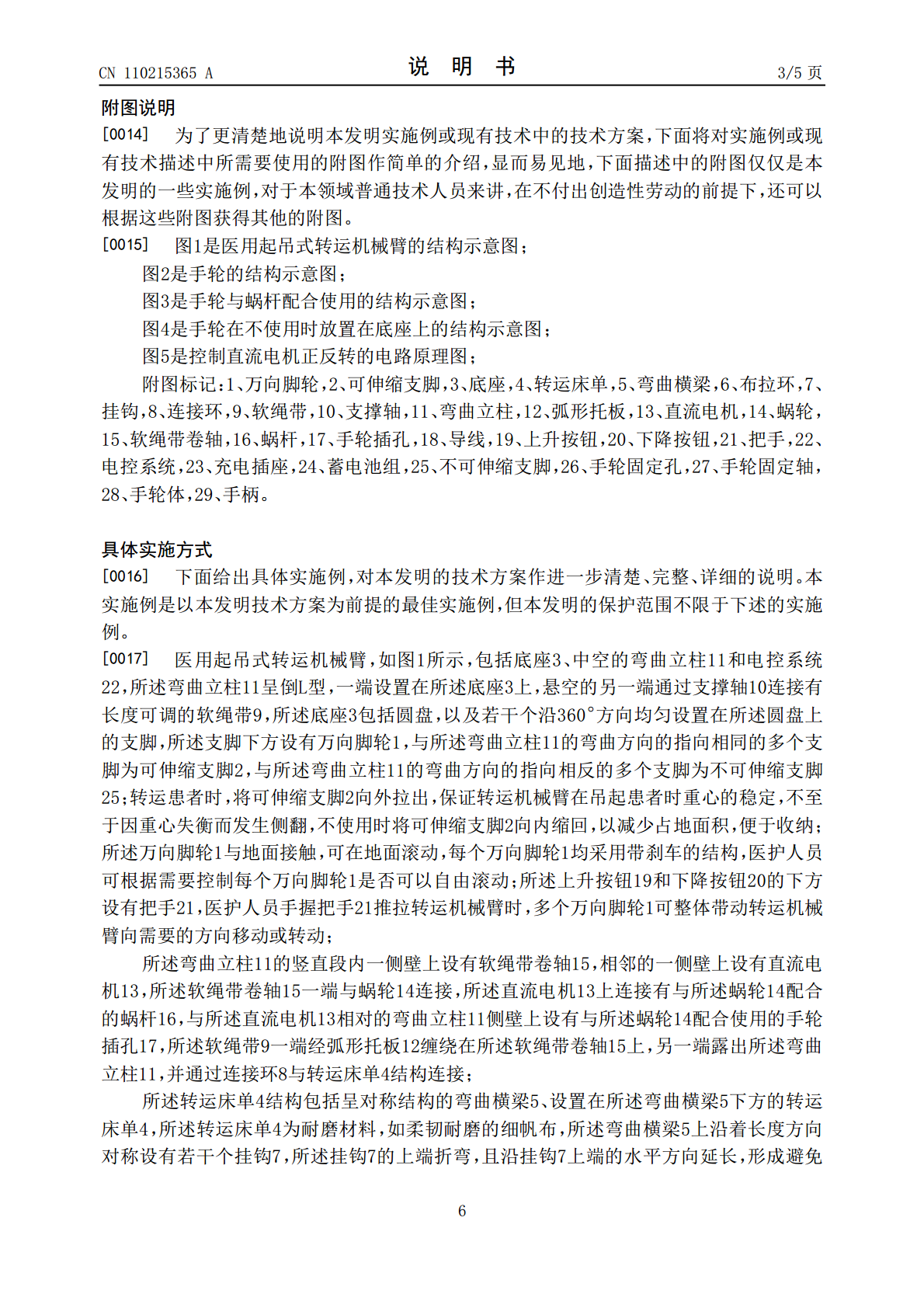
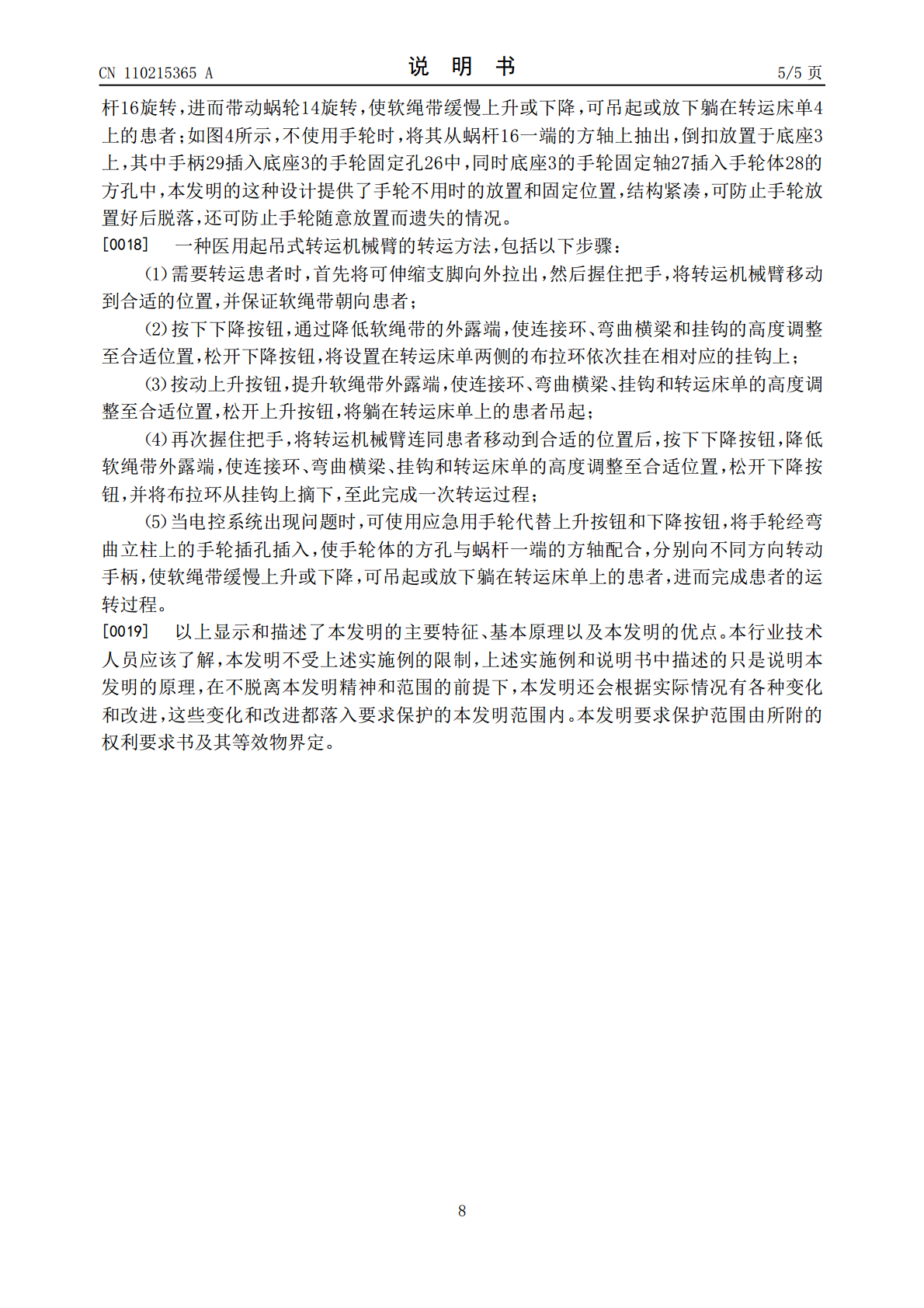
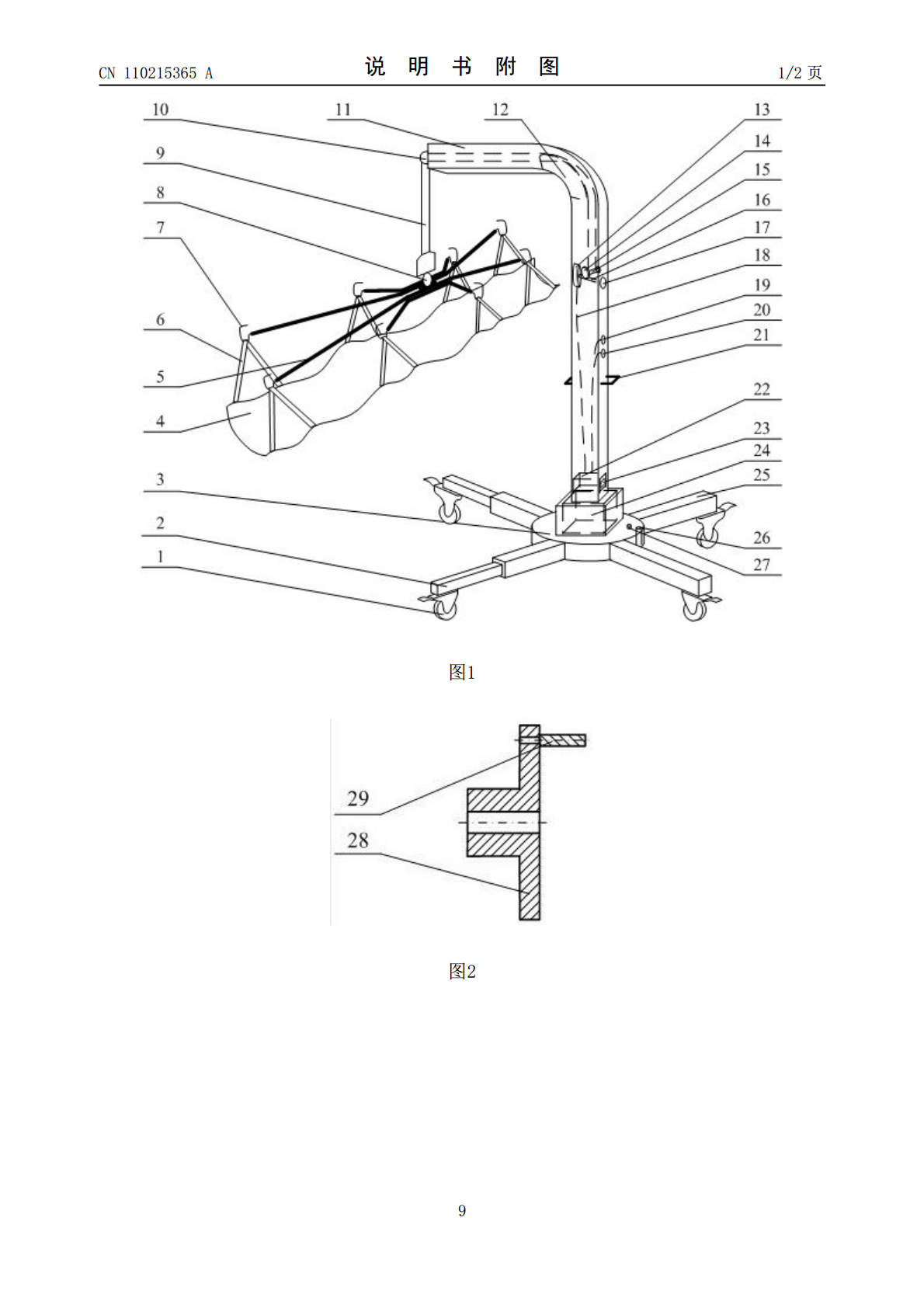
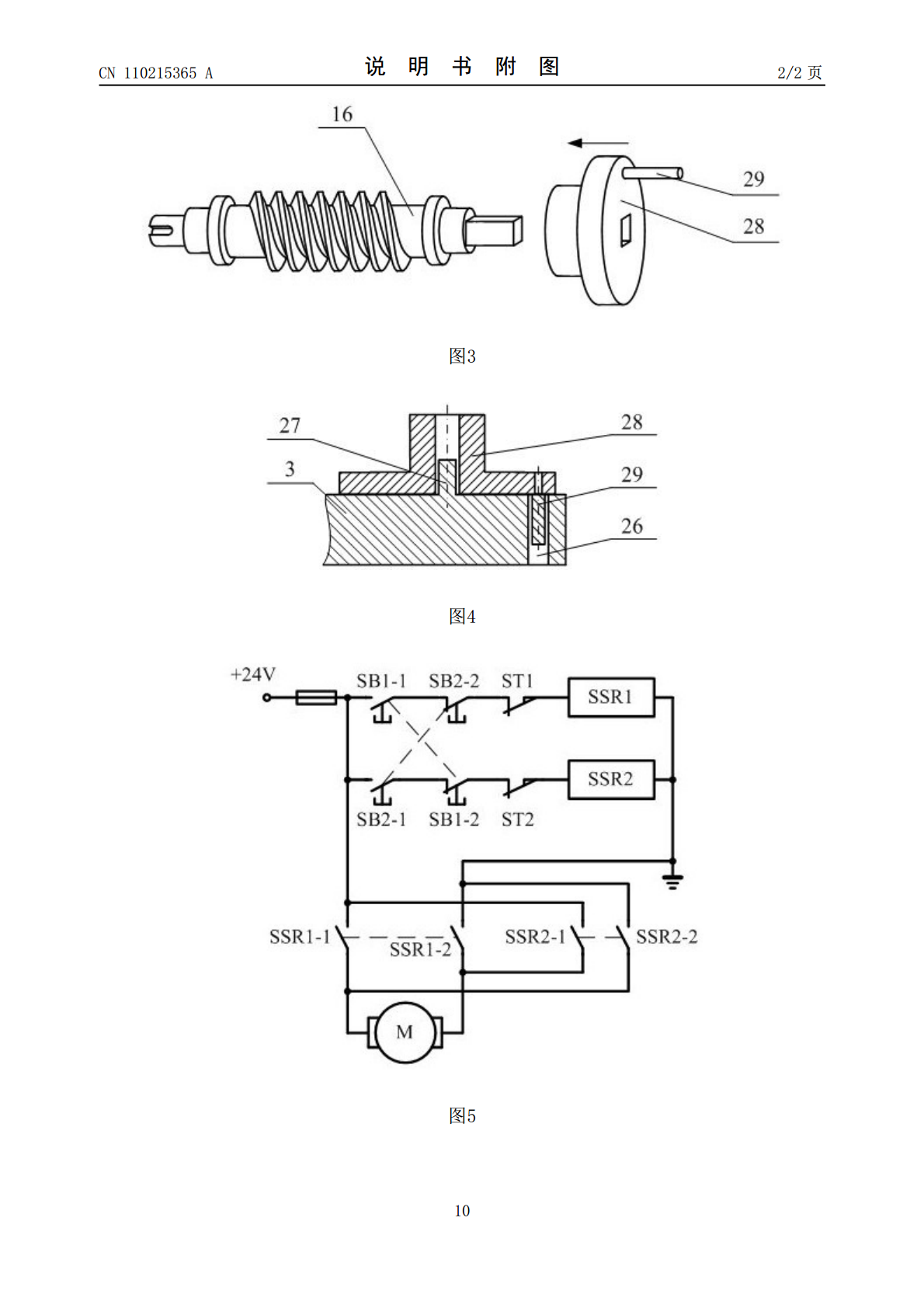
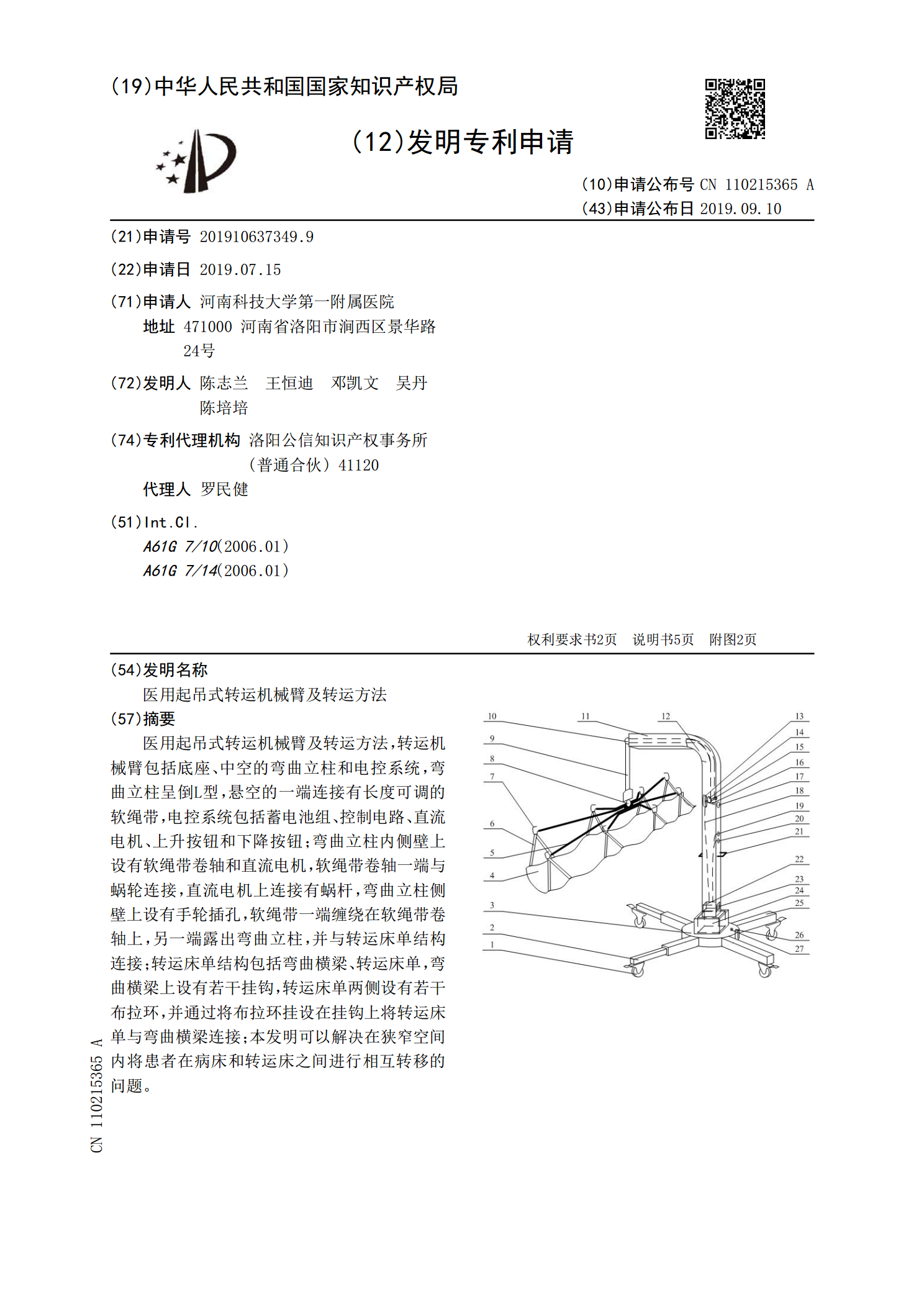
医用起吊式转运机械臂及转运方法,转运机械臂包括底座、中空的弯曲立柱和电控系统,弯曲立柱呈倒L型,悬空的一端连接有长度可调的软绳带,电控系统包括蓄电池组、控制电路、直流电机、上升按钮和下降按钮;弯曲立柱内侧壁上设有软绳带卷轴和直流电机,软绳带卷轴一端与蜗轮连接,直流电机上连接有蜗杆,弯曲立柱侧壁上设有手轮插孔,软绳带一端缠绕在软绳带卷轴上,另一端露出弯曲立柱,并与转运床单结构连接;转运床单结构包括弯曲横梁、转运床单,弯曲横梁上设有若干挂钩,转运床单两侧设有若干布拉环,并通过将布拉环挂设在挂钩上将转运床单与弯
医用起吊转运装置.pdf
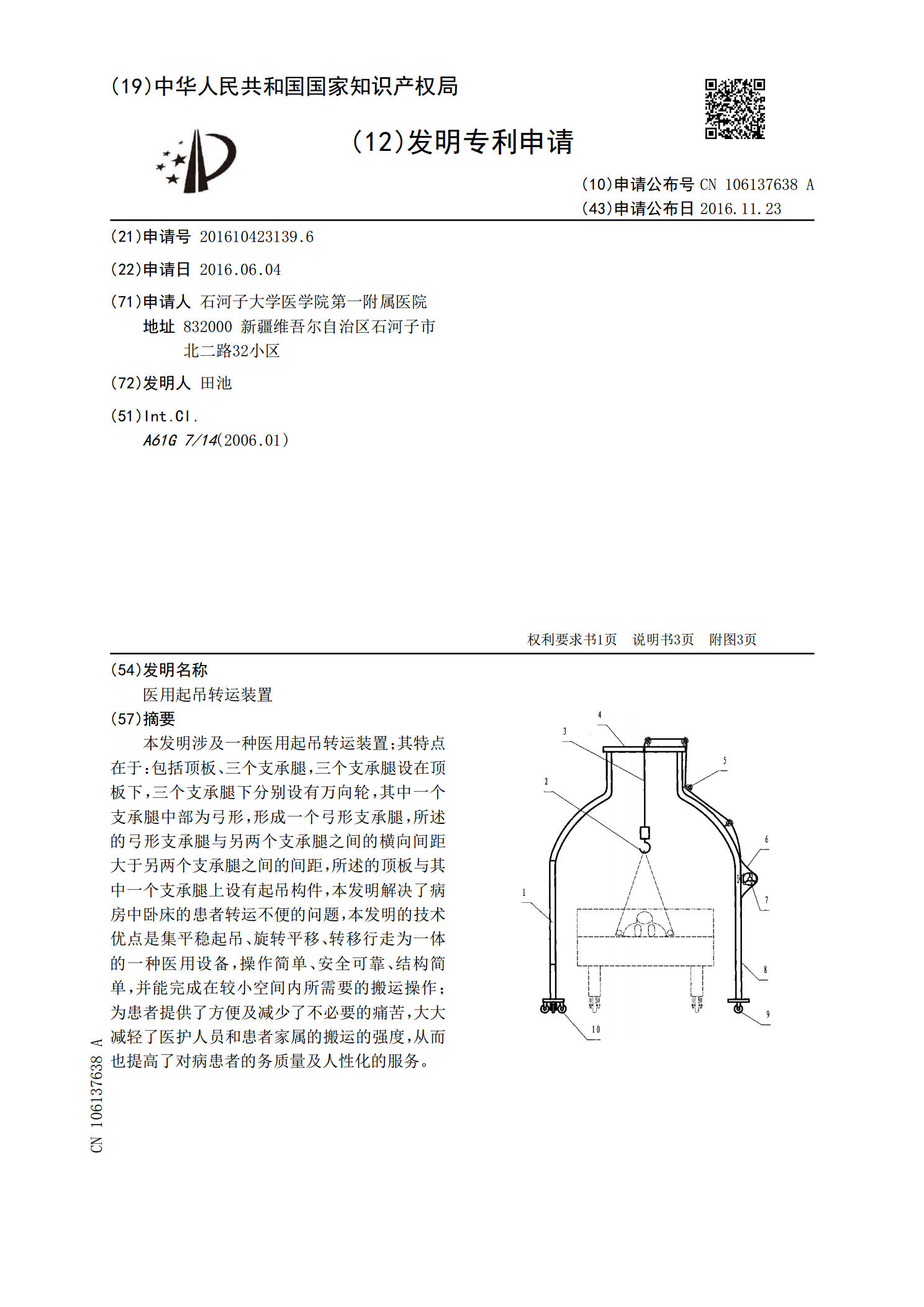
本发明涉及一种医用起吊转运装置;其特点在于:包括顶板、三个支承腿,三个支承腿设在顶板下,三个支承腿下分别设有万向轮,其中一个支承腿中部为弓形,形成一个弓形支承腿,所述的弓形支承腿与另两个支承腿之间的横向间距大于另两个支承腿之间的间距,所述的顶板与其中一个支承腿上设有起吊构件,本发明解决了病房中卧床的患者转运不便的问题,本发明的技术优点是集平稳起吊、旋转平移、转移行走为一体的一种医用设备,操作简单、安全可靠、结构简单,并能完成在较小空间内所需要的搬运操作;为患者提供了方便及减少了不必要的痛苦,大大减轻了医护
起吊转运式大型机械工件淬火系统.pdf
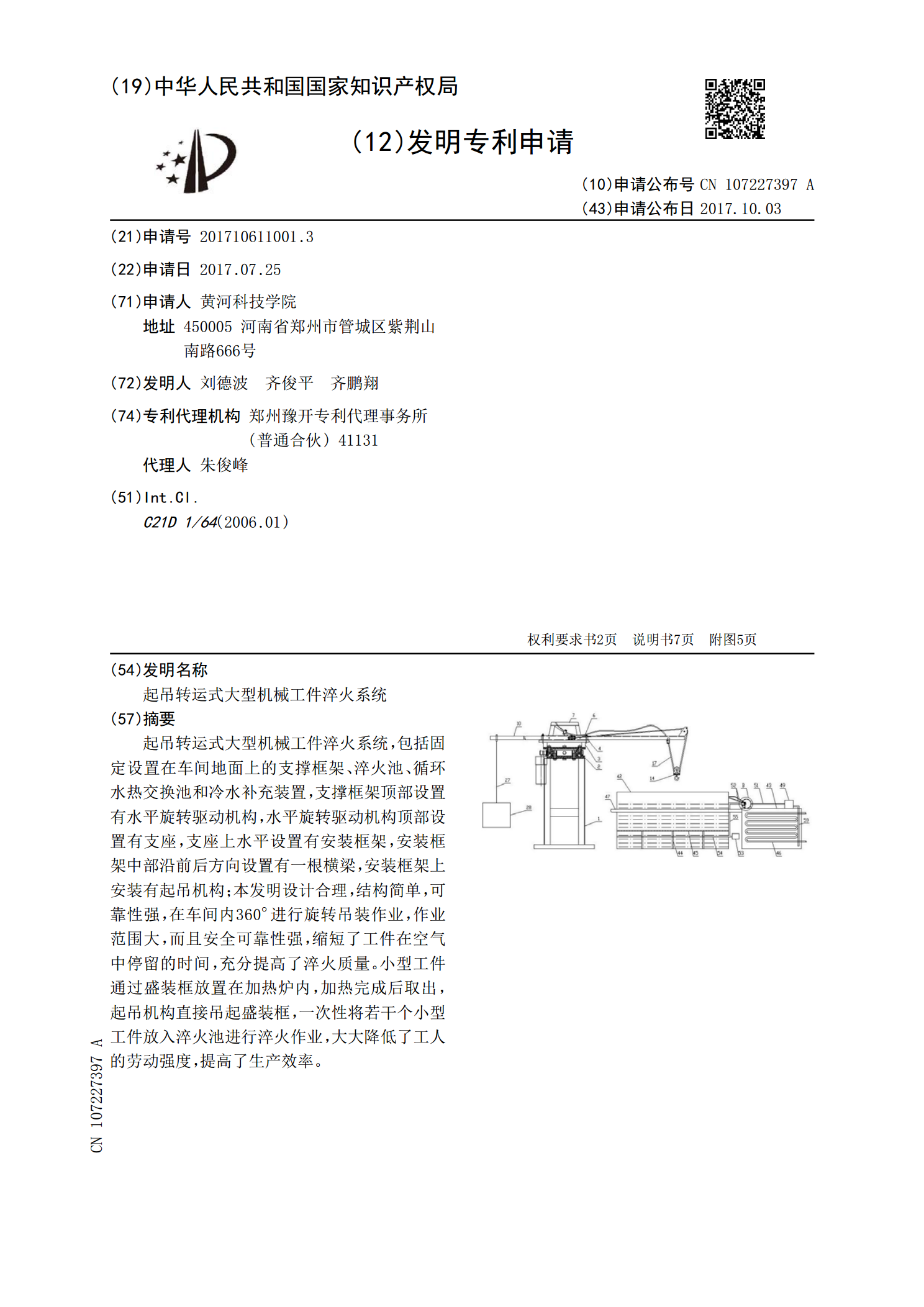
起吊转运式大型机械工件淬火系统,包括固定设置在车间地面上的支撑框架、淬火池、循环水热交换池和冷水补充装置,支撑框架顶部设置有水平旋转驱动机构,水平旋转驱动机构顶部设置有支座,支座上水平设置有安装框架,安装框架中部沿前后方向设置有一根横梁,安装框架上安装有起吊机构;本发明设计合理,结构简单,可靠性强,在车间内360°进行旋转吊装作业,作业范围大,而且安全可靠性强,缩短了工件在空气中停留的时间,充分提高了淬火质量。小型工件通过盛装框放置在加热炉内,加热完成后取出,起吊机构直接吊起盛装框,一次性将若干个小型工件
医用铲式担架转运车.pdf
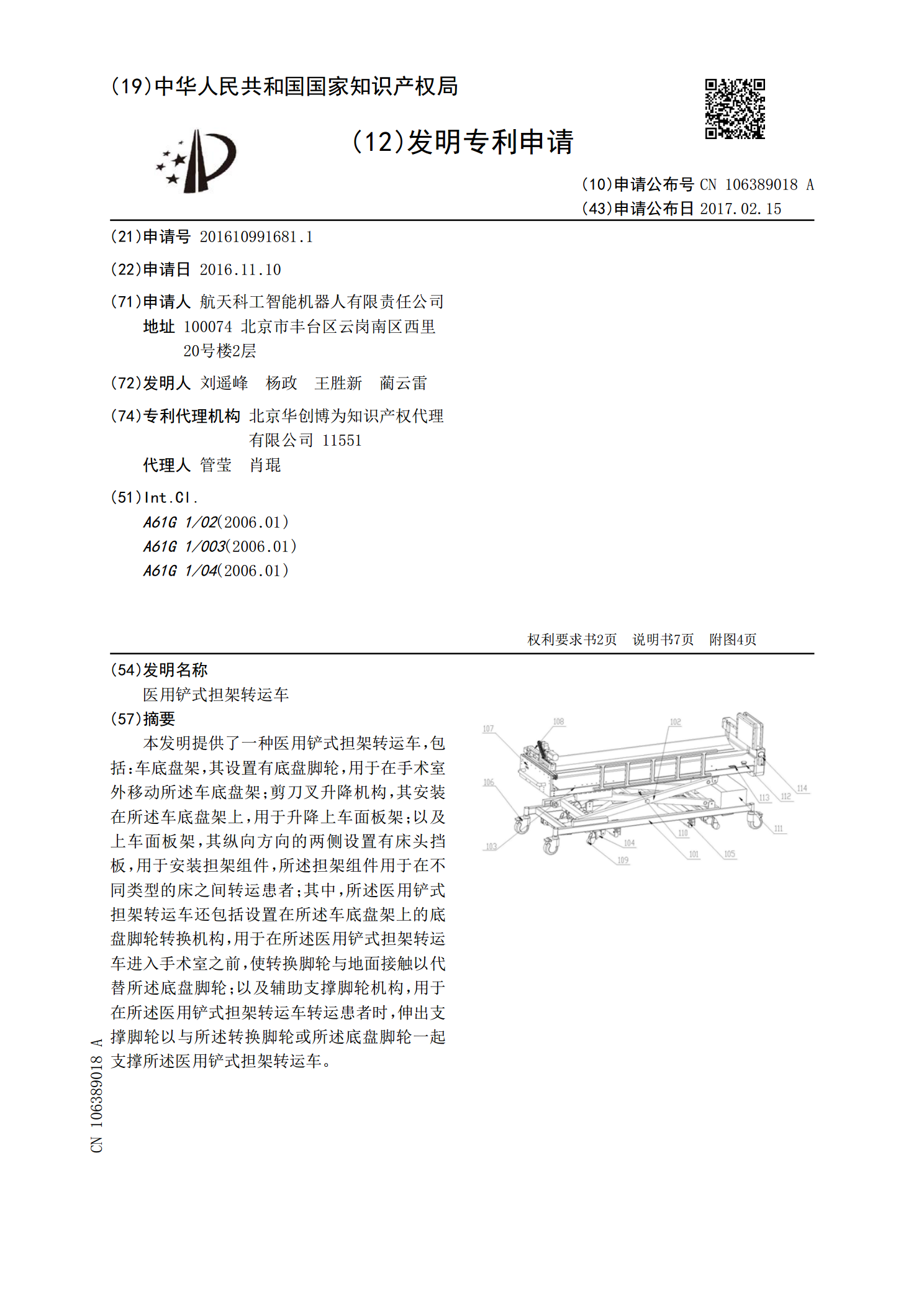
本发明提供了一种医用铲式担架转运车,包括:车底盘架,其设置有底盘脚轮,用于在手术室外移动所述车底盘架;剪刀叉升降机构,其安装在所述车底盘架上,用于升降上车面板架;以及上车面板架,其纵向方向的两侧设置有床头挡板,用于安装担架组件,所述担架组件用于在不同类型的床之间转运患者;其中,所述医用铲式担架转运车还包括设置在所述车底盘架上的底盘脚轮转换机构,用于在所述医用铲式担架转运车进入手术室之前,使转换脚轮与地面接触以代替所述底盘脚轮;以及辅助支撑脚轮机构,用于在所述医用铲式担架转运车转运患者时,伸出支撑脚轮以与所
一种起吊式物料转运机.pdf
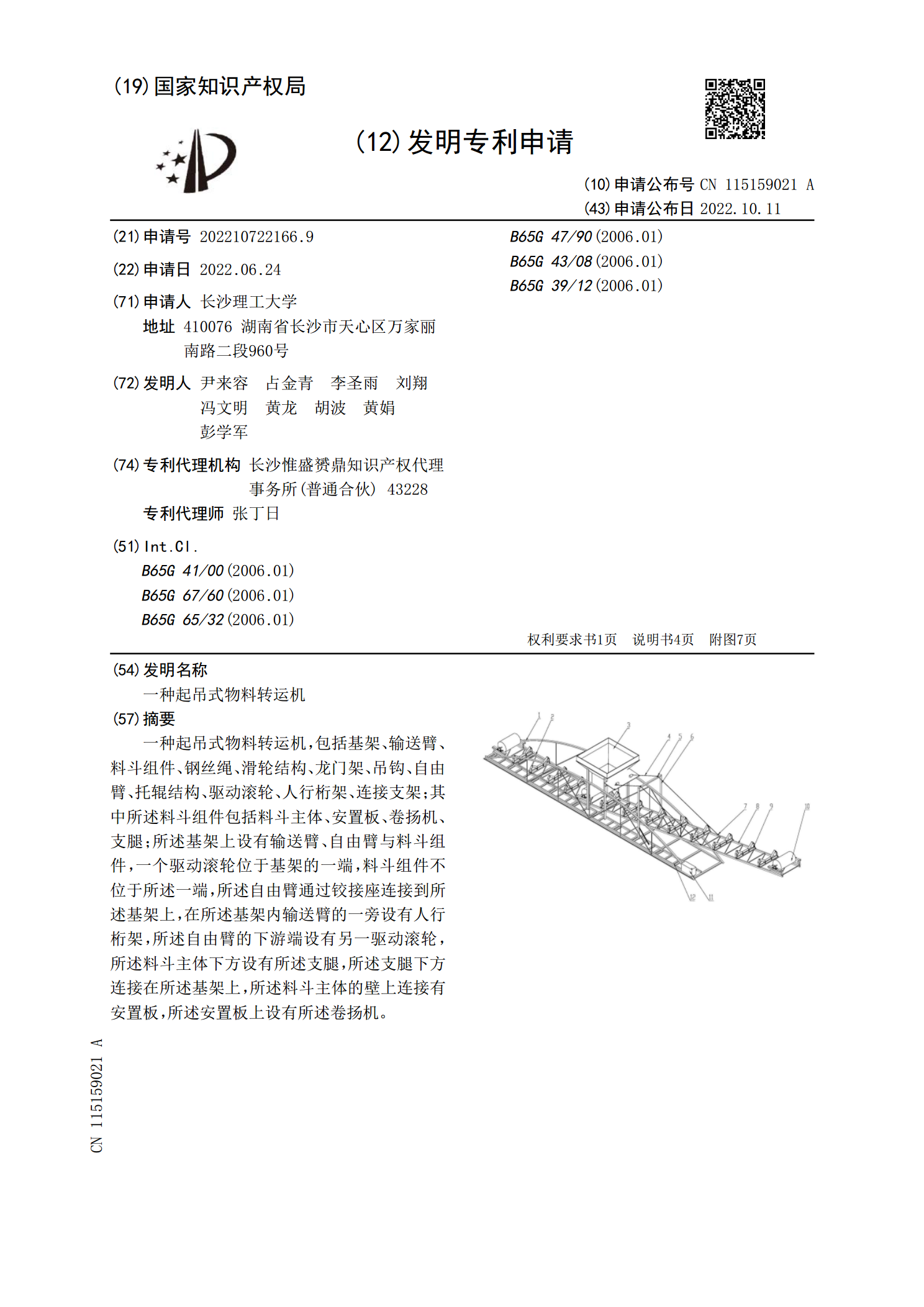
一种起吊式物料转运机,包括基架、输送臂、料斗组件、钢丝绳、滑轮结构、龙门架、吊钩、自由臂、托辊结构、驱动滚轮、人行桁架、连接支架;其中所述料斗组件包括料斗主体、安置板、卷扬机、支腿;所述基架上设有输送臂、自由臂与料斗组件,一个驱动滚轮位于基架的一端,料斗组件不位于所述一端,所述自由臂通过铰接座连接到所述基架上,在所述基架内输送臂的一旁设有人行桁架,所述自由臂的下游端设有另一驱动滚轮,所述料斗主体下方设有所述支腿,所述支腿下方连接在所述基架上,所述料斗主体的壁上连接有安置板,所述安置板上设有所述卷扬机。