
下肢外骨骼【人体下肢外骨骼仿生】.docx

岚风****55


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

下肢外骨骼【人体下肢外骨骼仿生】.docx
下肢外骨骼【人体下肢外骨骼仿生】人体下肢外骨骼机理分析xx(xx,xxxx,xxxx)摘要:本论文研究穿戴型下肢外骨骼机器人机构。所研究的外骨骼是一种可以穿戴于人体的机械装置。这种外骨骼依靠人的运动信息来控制机器人,通过机器人来完成仅靠人的自身能力无法单独完成的远行、负重等任务。这种外骨骼也可以用来检测人体运动信息,作为康复医疗器械使用。下肢穿戴外骨骼机器人是一种具有双足步行特征的典型的人机一体化系统。关键词:穿戴外骨骼;助力机器人;机构设计;仿真分析ANALYSISANDDESIGNOFLOWEREXT
下肢外骨骼装置.pdf
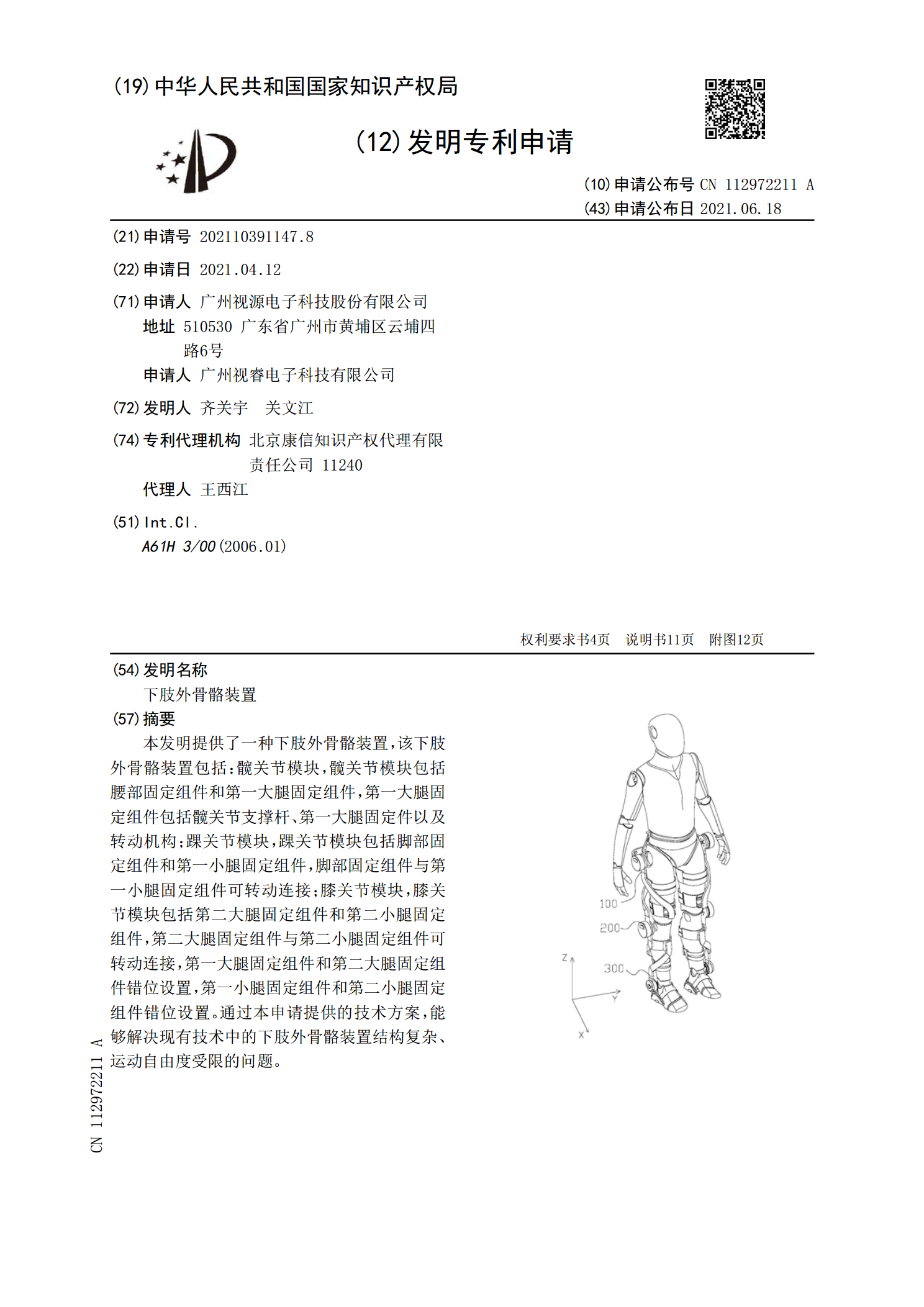
本发明提供了一种下肢外骨骼装置,该下肢外骨骼装置包括:髋关节模块,髋关节模块包括腰部固定组件和第一大腿固定组件,第一大腿固定组件包括髋关节支撑杆、第一大腿固定件以及转动机构;踝关节模块,踝关节模块包括脚部固定组件和第一小腿固定组件,脚部固定组件与第一小腿固定组件可转动连接;膝关节模块,膝关节模块包括第二大腿固定组件和第二小腿固定组件,第二大腿固定组件与第二小腿固定组件可转动连接,第一大腿固定组件和第二大腿固定组件错位设置,第一小腿固定组件和第二小腿固定组件错位设置。通过本申请提供的技术方案,能够解决现有技
下肢康复外骨骼.pdf
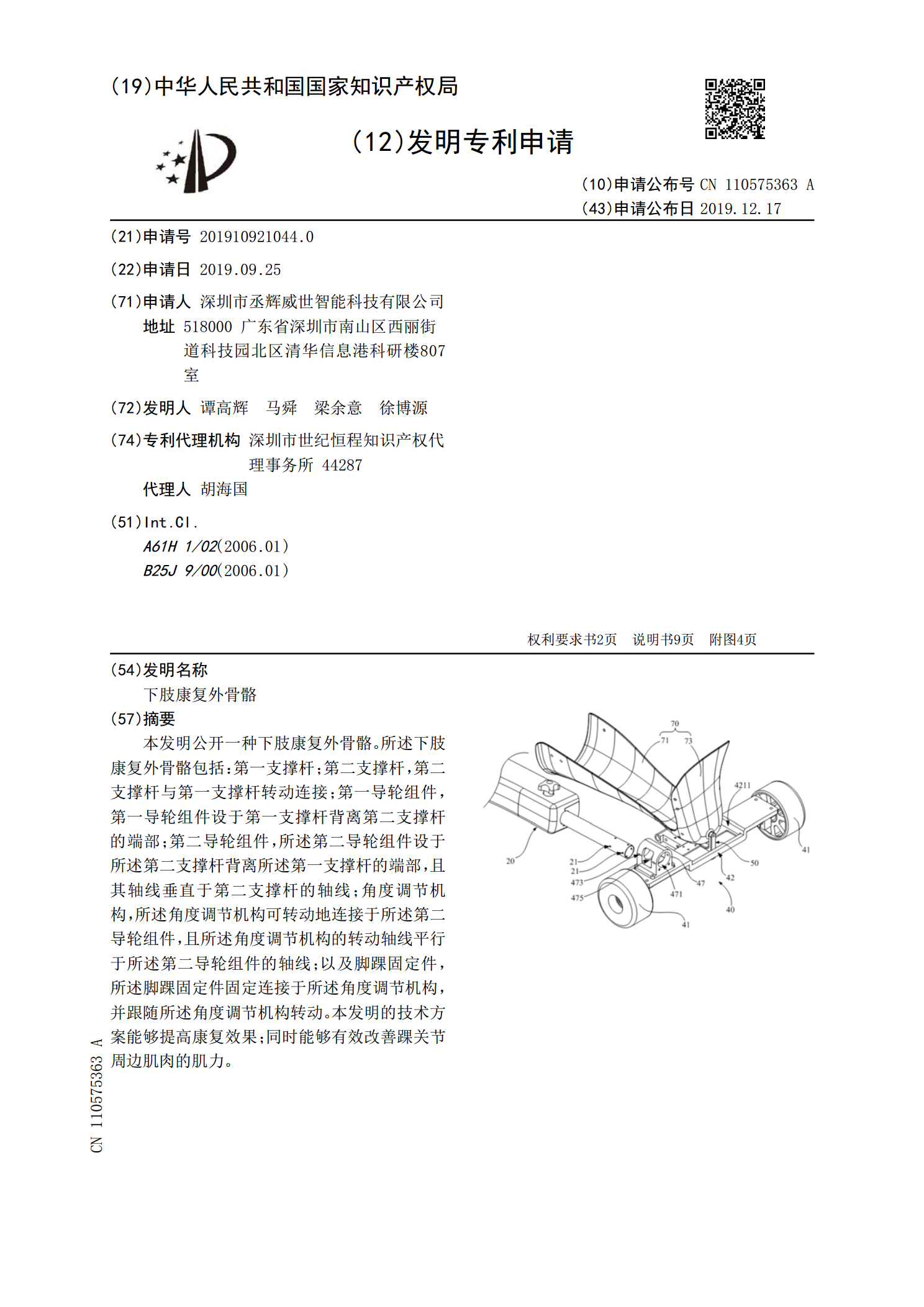
本发明公开一种下肢康复外骨骼。所述下肢康复外骨骼包括:第一支撑杆;第二支撑杆,第二支撑杆与第一支撑杆转动连接;第一导轮组件,第一导轮组件设于第一支撑杆背离第二支撑杆的端部;第二导轮组件,所述第二导轮组件设于所述第二支撑杆背离所述第一支撑杆的端部,且其轴线垂直于第二支撑杆的轴线;角度调节机构,所述角度调节机构可转动地连接于所述第二导轮组件,且所述角度调节机构的转动轴线平行于所述第二导轮组件的轴线;以及脚踝固定件,所述脚踝固定件固定连接于所述角度调节机构,并跟随所述角度调节机构转动。本发明的技术方案能够提高康

符合人体仿生学设计的外骨骼机器人的下肢结构组件.pdf
本发明涉及医疗机器人领域,尤其涉及符合人体仿生学设计的外骨骼机器人的下肢结构组件,包括下肢结构,下肢结构包括用于固定人体髋部的髋部件、用于固定人体大腿的大腿部件和用于固定人体小腿的小腿部件,髋部件的下端设有第三驱动电机,第三驱动电机的输出端与大腿部件上端固定连接,大腿部件下端设有第四驱动电机,第四驱动电机的输出端与小腿部件的上端固定连接;下肢结构组件还包括电缆、蓄电池和用于自动跟随下肢结构行走的轮椅,蓄电池设在轮椅上,下肢结构上设有电源接口,蓄电池通过电缆与电源接口电连接。本发明提供的用于智能外骨骼机器人

人体下肢外骨骼工作机理研究的开题报告.docx
优秀毕业论文开题报告人体下肢外骨骼工作机理研究的开题报告一、研究背景随着人工智能、机器人技术的发展,外骨骼技术已经成为一种备受关注的新兴技术,特别是在医疗康复领域。下肢外骨骼是一种能够辅助下肢运动的机械结构,可以帮助行动不便的人恢复行走能力,同时也可以在工业生产中发挥重要作用。因此,对人体下肢外骨骼的工作机理进行深入研究,具有重要的理论和实践意义。二、研究目的本研究旨在探究人体下肢外骨骼的工作机理,包括外骨骼的结构、力学特性、运动控制等方面,为下肢外骨骼的研发和应用提供理论支持和技术指导。三、研究内容1.