
基于雷达杂波图的CFAR算法-雷达杂波图.docx

建英****66


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于雷达杂波图的CFAR算法-雷达杂波图.docx
基于雷达杂波图的CFAR算法:雷达杂波图第39卷第4期(总第154期)2010年12月火控雷达技术FireControlRadarTechnologyVol.39No.4(Series154)Dec.2010基于雷达杂波图的CFAR算法王雪雷卓欧阳耀果(西安电子科技大学西安710071)【摘要】在研究现代三坐标(3D)雷达中三维杂波图的形成原理的基础上,将各种恒虚警(CFAR)算法应用于轮廓杂波图中,得出采用有序统计(OS)算法不但可较好的对杂波建立标志,对杂波外的目标不建立标志位,且对慢速目标有较好的检
建立剩余杂波图抑制雷达剩余杂波的方法.pdf
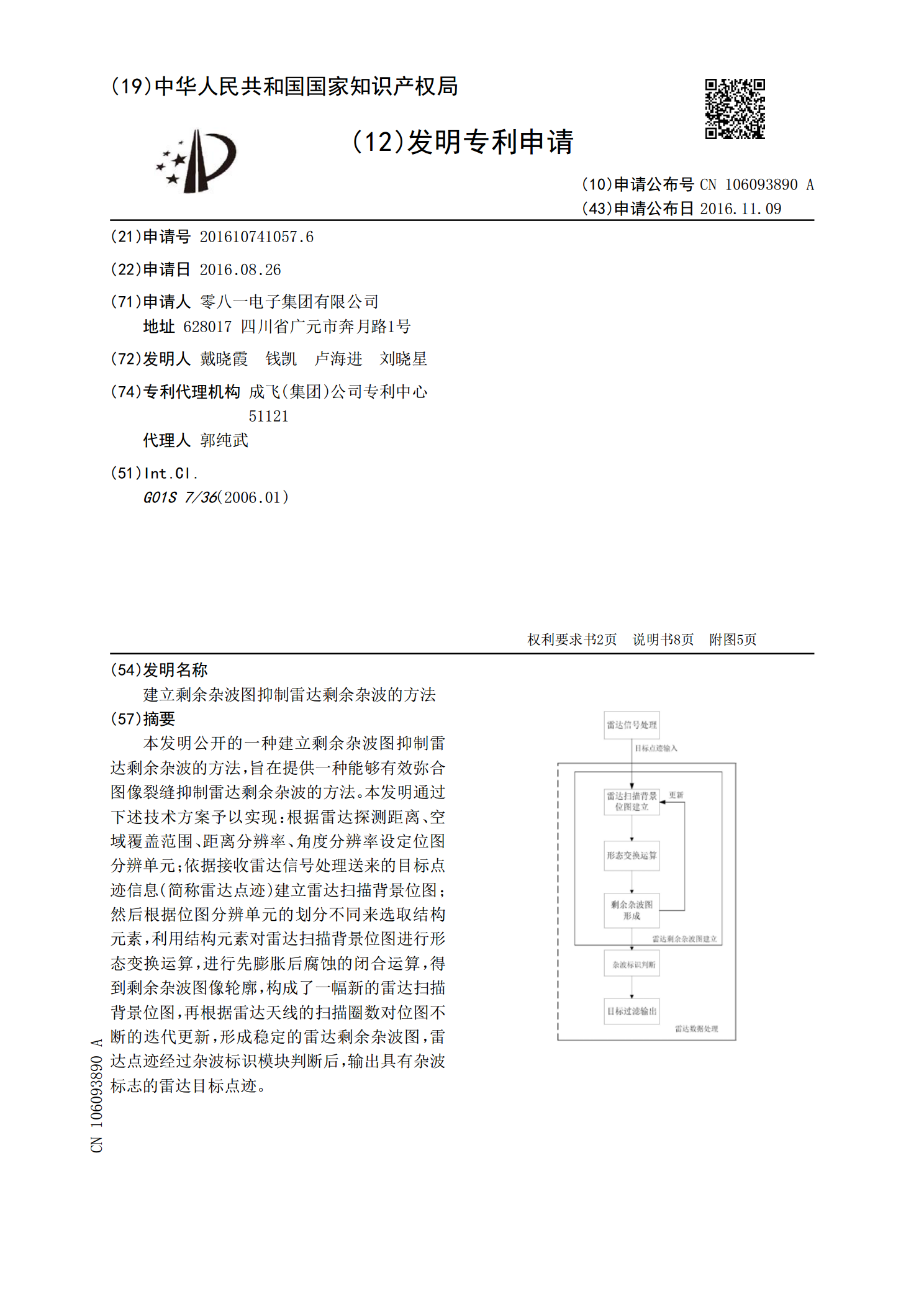
本发明公开的一种建立剩余杂波图抑制雷达剩余杂波的方法,旨在提供一种能够有效弥合图像裂缝抑制雷达剩余杂波的方法。本发明通过下述技术方案予以实现:根据雷达探测距离、空域覆盖范围、距离分辨率、角度分辨率设定位图分辨单元;依据接收雷达信号处理送来的目标点迹信息(简称雷达点迹)建立雷达扫描背景位图;然后根据位图分辨单元的划分不同来选取结构元素,利用结构元素对雷达扫描背景位图进行形态变换运算,进行先膨胀后腐蚀的闭合运算,得到剩余杂波图像轮廓,构成了一幅新的雷达扫描背景位图,再根据雷达天线的扫描圈数对位图不断的迭代更新

一种基于航迹杂波图的脉冲多普勒雷达杂波抑制方法.pdf
本发明提出了一种基于航迹杂波图的固定航迹杂波抑制方法,方法包括:接收机接收返回的射频信号,经预处理后获得检测目标及其杂波点轨迹信息;基于航迹起始算法与航迹关联算法对所述点轨迹信息处理后得到目标与杂波航迹信息;将所述航迹信息与预先存储的航迹杂波图中的对应杂波图单元格内的航迹相似性进行比对,若为杂波航迹,取消在雷达上显示,若为疑似目标,则上传至雷达显示界面进行显示。本发明的杂波抑制方法针对解决部分行人、车辆、大型车辆副瓣或具有特定航线的客机等类型杂波,且经过实测验证,该方法可以有效抑制70%‑80%的杂波航迹

某雷达杂波数据分析及杂波图技术研究.docx
某雷达杂波数据分析及杂波图技术研究标题:某雷达杂波数据分析及杂波图技术研究摘要:本文以某雷达杂波数据分析及杂波图技术为研究对象,通过对雷达系统中杂波的理解和分析,探讨杂波图技术的应用。针对某雷达杂波数据进行分析和处理,研究了杂波的特性及其对雷达性能的影响,通过引入杂波图技术,进一步提升了雷达系统的性能。一、引言随着雷达技术的发展,杂波对雷达系统性能的影响逐渐凸显。杂波是由雷达系统自身以及外界环境因素引发的信号干扰。因此,对杂波的分析和处理成为提升雷达系统性能的重要途径。本文通过对某雷达杂波数据进行分析,以

某雷达杂波数据分析及杂波图技术研究.pptx
添加副标题目录PART01PART02雷达杂波数据的来源雷达杂波数据的特性雷达杂波数据的应用场景PART03雷达杂波数据的预处理雷达杂波数据的特征提取雷达杂波数据的分类与识别PART04雷达杂波图的绘制方法雷达杂波图的分类与特点雷达杂波图的应用场景与优势PART05雷达杂波数据在军事领域的应用雷达杂波图技术在气象监测中的应用雷达杂波数据在其他领域的应用前景PART06雷达杂波数据与杂波图技术面临的挑战雷达杂波数据与杂波图技术的发展趋势与展望感谢您的观看