
一种航空施药作业雾滴沉积效果检测方法.pdf

一只****呀淑

1/10
2/10
3/10

4/10

5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种航空施药作业雾滴沉积效果检测方法.pdf
本发明公开了一种航空施药作业雾滴沉积效果检测方法,首先划定航空施药作业的检测区域,接着确定施药作业检测区域三维场景空间深度及结构;构建喷施检测区域靶标作物多模态三维生长模型以及制作检测区域采样点位布局方案与施药作业处方图;随后在检测区域进行气味传感器布置;接着将气味添加剂与农药混合;无人机按照施药作业处方图进行航空施药作业;待药液沉降T时间后,所有气味传感器对气味检测室内收集到的特定添加气味进行检测,结合气味‑农药定量转化检测模型分析各个采样点位的农药沉积量;地面控制端结合各个采样点位所处检测区域的实际空
雾滴沉积量测量方法、装置及系统.pdf
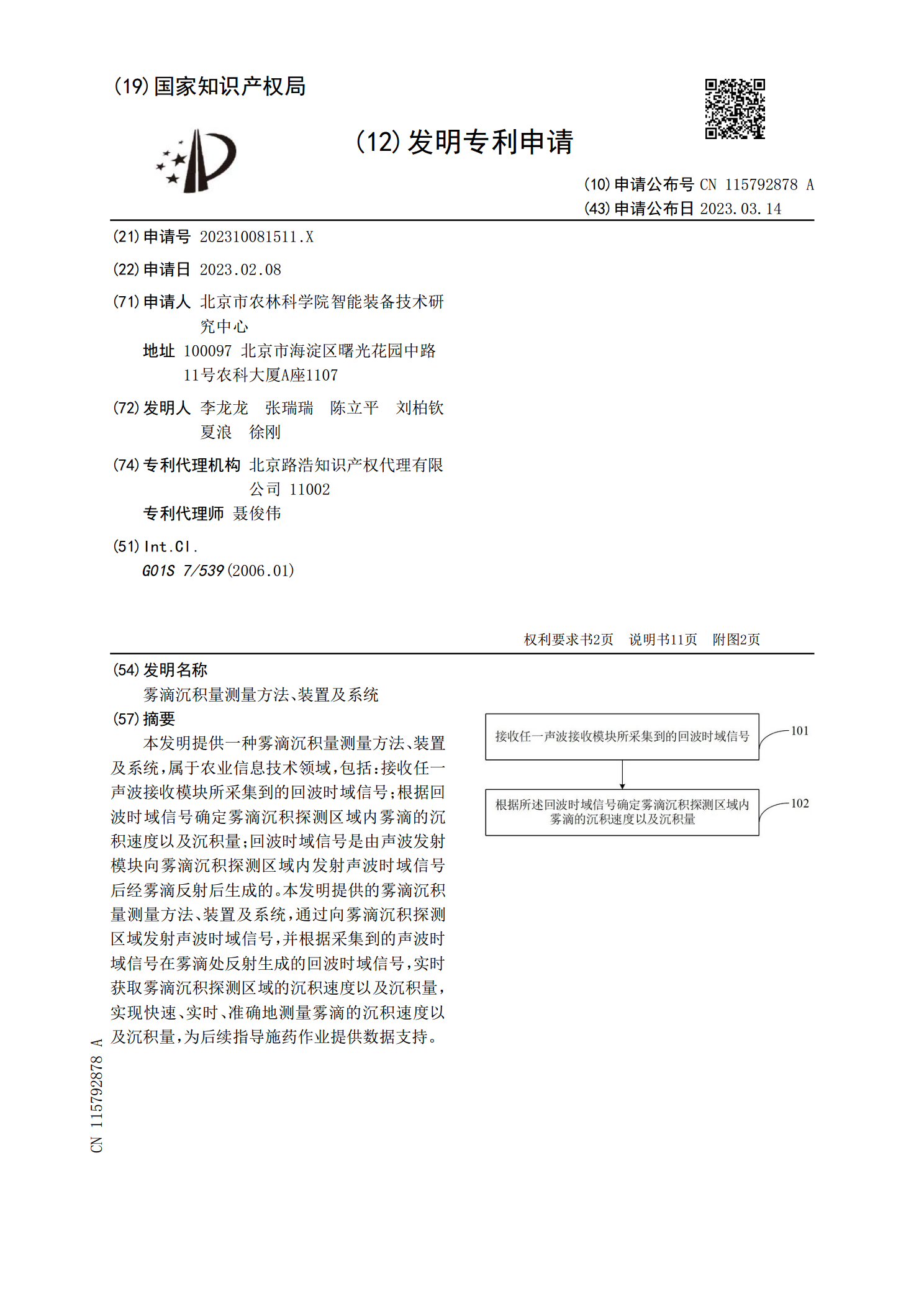
本发明提供一种雾滴沉积量测量方法、装置及系统,属于农业信息技术领域,包括:接收任一声波接收模块所采集到的回波时域信号;根据回波时域信号确定雾滴沉积探测区域内雾滴的沉积速度以及沉积量;回波时域信号是由声波发射模块向雾滴沉积探测区域内发射声波时域信号后经雾滴反射后生成的。本发明提供的雾滴沉积量测量方法、装置及系统,通过向雾滴沉积探测区域发射声波时域信号,并根据采集到的声波时域信号在雾滴处反射生成的回波时域信号,实时获取雾滴沉积探测区域的沉积速度以及沉积量,实现快速、实时、准确地测量雾滴的沉积速度以及沉积量,为

测量雾滴沉积分布情况的方法、装置和系统.pdf
本发明涉及一种测量雾滴沉积分布情况的方法、装置和系统,该方法包括:对雾滴喷射装置下方的区域进行照明;对未有雾滴下落时的照明区域进行拍摄,得到背景图像;对有雾滴下落时的照明区域进行拍摄,得到多张雾滴图像;将每一张所述雾滴图像减去所述背景图像,得到对应的粒子灰度图像;根据各张粒子灰度图像,确定所述照明区域的雾滴沉积量分布情况。本发明提供的测量雾滴沉积分布情况的方法、装置和系统,不会干扰到风场以及雾滴的运动,适用于小范围、长时间、大流量的喷雾试验,尤其适合对旋翼下洗气流影响下的雾滴沉积分布的分析。
农用无人机航空施药作业监控装置.pdf
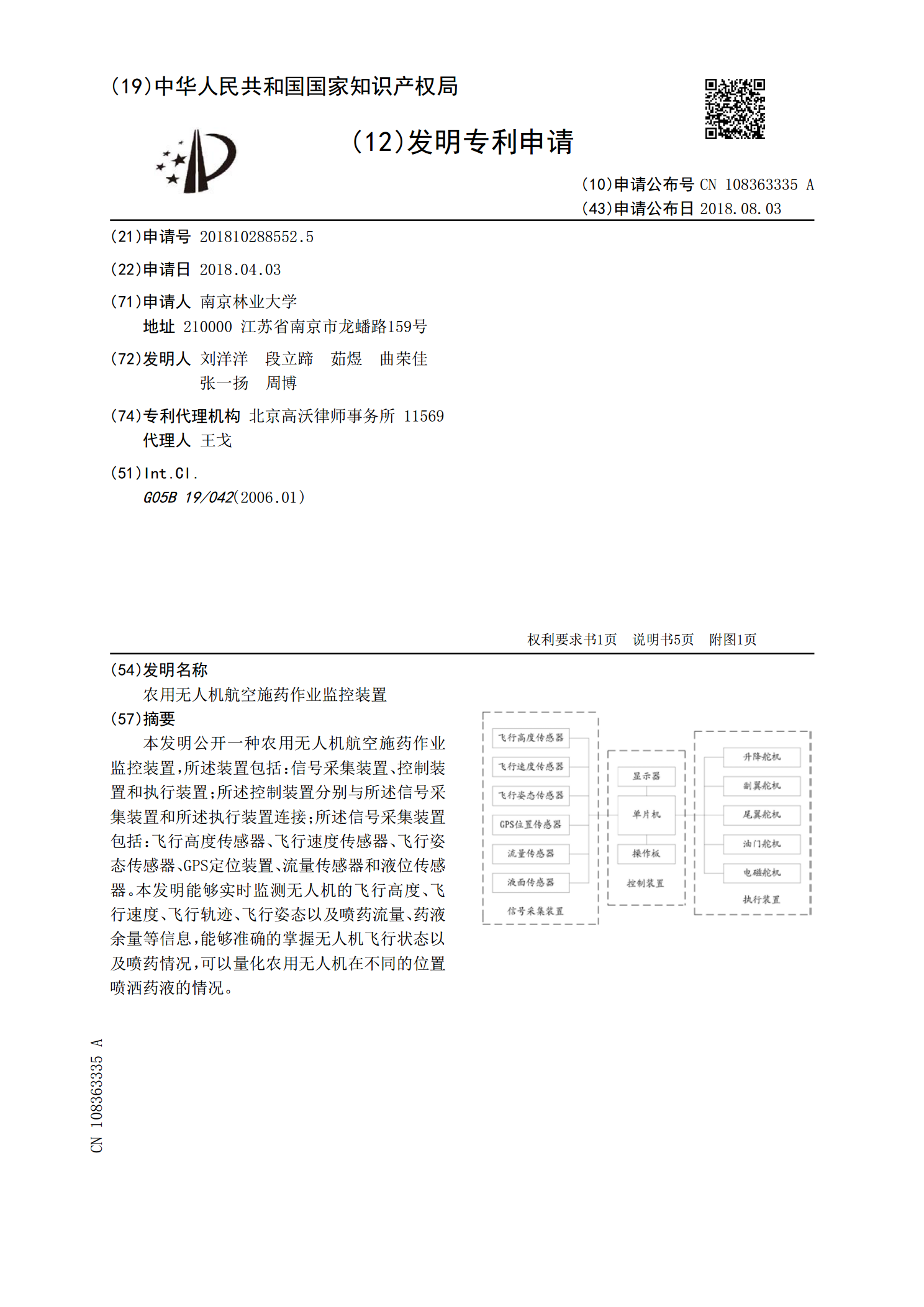
本发明公开一种农用无人机航空施药作业监控装置,所述装置包括:信号采集装置、控制装置和执行装置;所述控制装置分别与所述信号采集装置和所述执行装置连接;所述信号采集装置包括:飞行高度传感器、飞行速度传感器、飞行姿态传感器、GPS定位装置、流量传感器和液位传感器。本发明能够实时监测无人机的飞行高度、飞行速度、飞行轨迹、飞行姿态以及喷药流量、药液余量等信息,能够准确的掌握无人机飞行状态以及喷药情况,可以量化农用无人机在不同的位置喷洒药液的情况。
一种航空施药农药飘移监测预警系统及方法.pdf
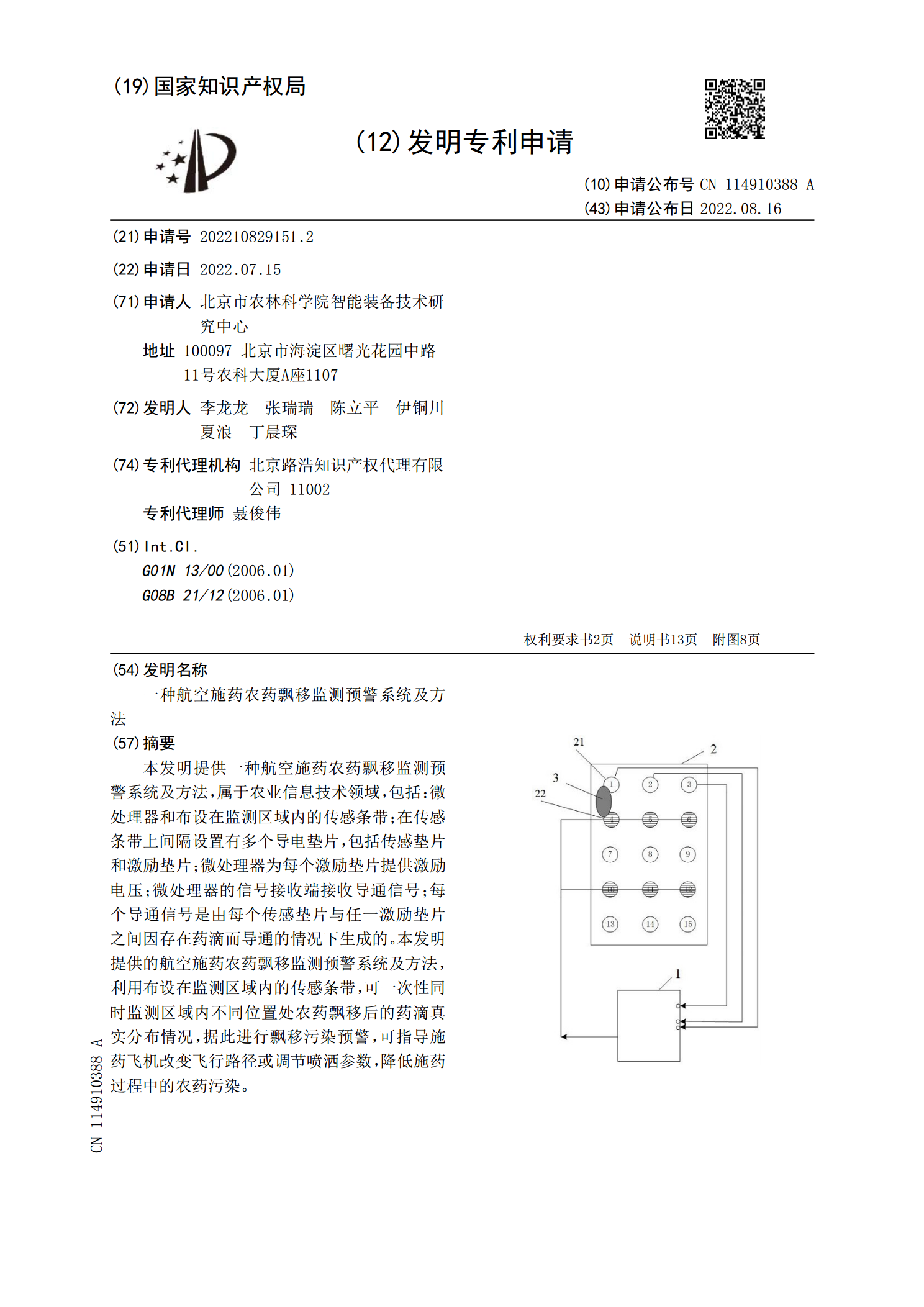
本发明提供一种航空施药农药飘移监测预警系统及方法,属于农业信息技术领域,包括:微处理器和布设在监测区域内的传感条带;在传感条带上间隔设置有多个导电垫片,包括传感垫片和激励垫片;微处理器为每个激励垫片提供激励电压;微处理器的信号接收端接收导通信号;每个导通信号是由每个传感垫片与任一激励垫片之间因存在药滴而导通的情况下生成的。本发明提供的航空施药农药飘移监测预警系统及方法,利用布设在监测区域内的传感条带,可一次性同时监测区域内不同位置处农药飘移后的药滴真实分布情况,据此进行飘移污染预警,可指导施药飞机改变飞行