
路线生成方法、装置、无人作业车、电子设备及存储介质.pdf

哲妍****彩妍

1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
路线生成方法、装置、无人作业车、电子设备及存储介质.pdf
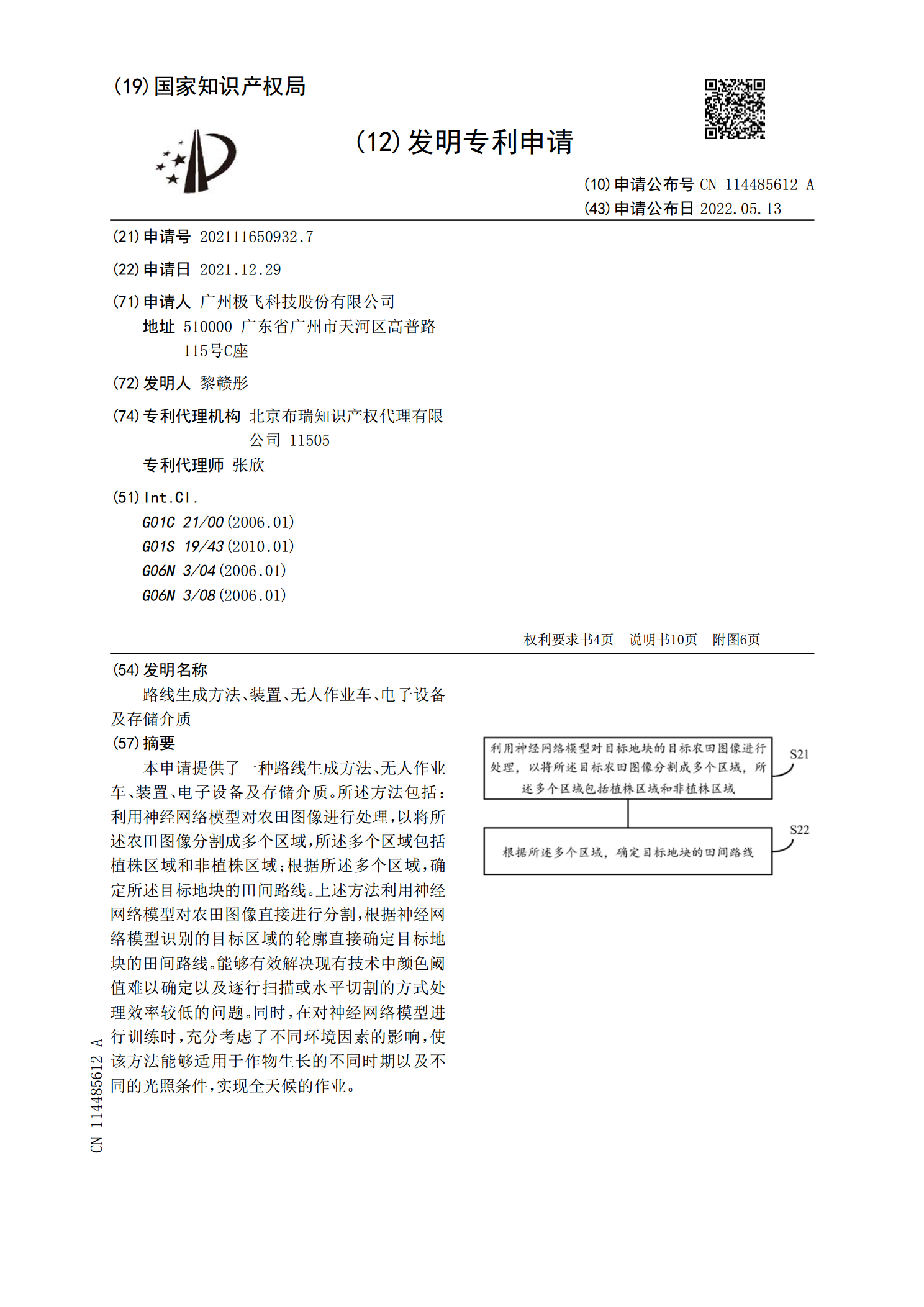
本申请提供了一种路线生成方法、无人作业车、装置、电子设备及存储介质。所述方法包括:利用神经网络模型对农田图像进行处理,以将所述农田图像分割成多个区域,所述多个区域包括植株区域和非植株区域;根据所述多个区域,确定所述目标地块的田间路线。上述方法利用神经网络模型对农田图像直接进行分割,根据神经网络模型识别的目标区域的轮廓直接确定目标地块的田间路线。能够有效解决现有技术中颜色阈值难以确定以及逐行扫描或水平切割的方式处理效率较低的问题。同时,在对神经网络模型进行训练时,充分考虑了不同环境因素的影响,使该方法能够适
无人车通信方法、装置、存储介质及电子设备.pdf
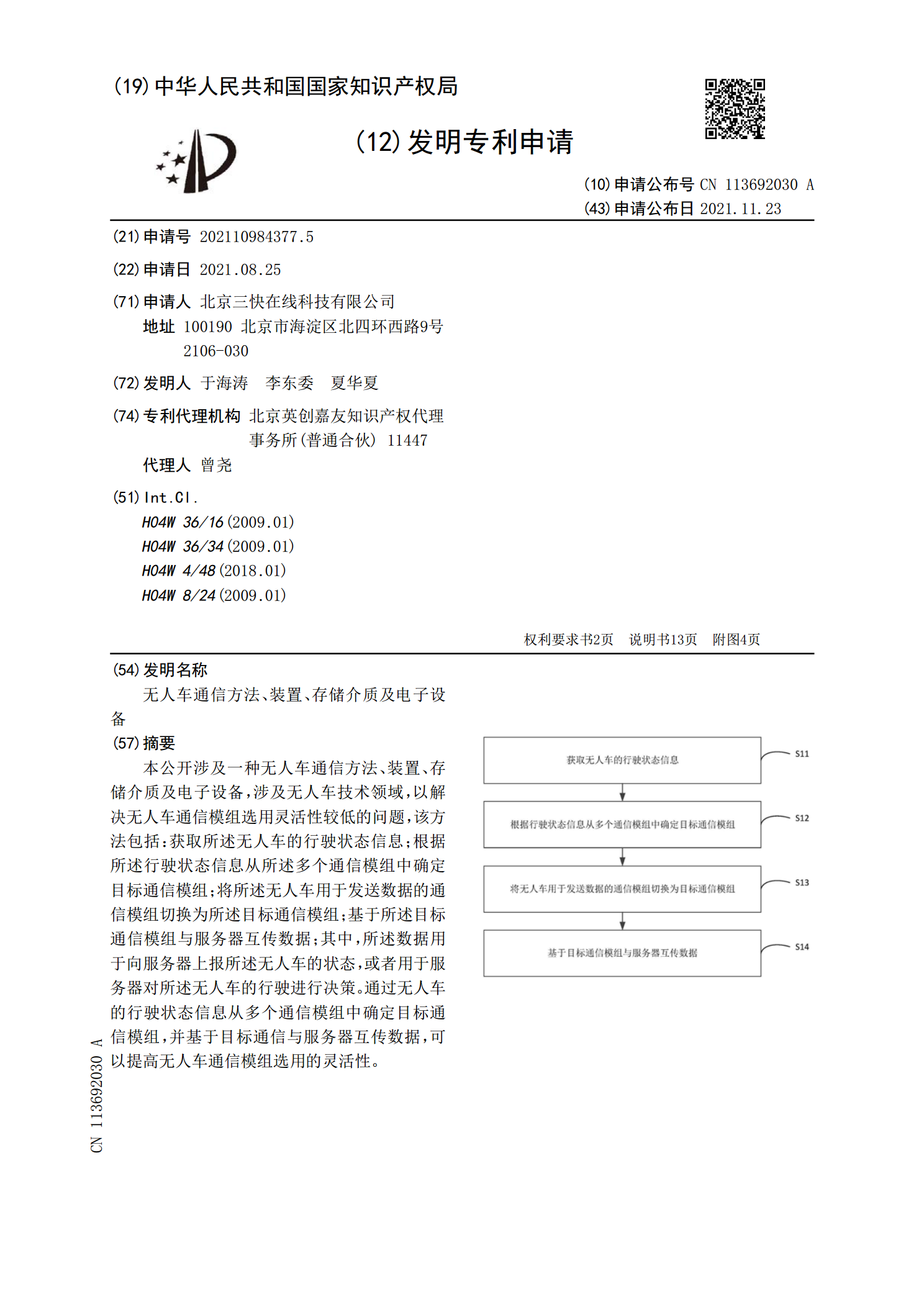
本公开涉及一种无人车通信方法、装置、存储介质及电子设备,涉及无人车技术领域,以解决无人车通信模组选用灵活性较低的问题,该方法包括:获取所述无人车的行驶状态信息;根据所述行驶状态信息从所述多个通信模组中确定目标通信模组;将所述无人车用于发送数据的通信模组切换为所述目标通信模组;基于所述目标通信模组与服务器互传数据;其中,所述数据用于向服务器上报所述无人车的状态,或者用于服务器对所述无人车的行驶进行决策。通过无人车的行驶状态信息从多个通信模组中确定目标通信模组,并基于目标通信与服务器互传数据,可以提高无人车通
无人车控制方法、装置、存储介质及电子设备.pdf
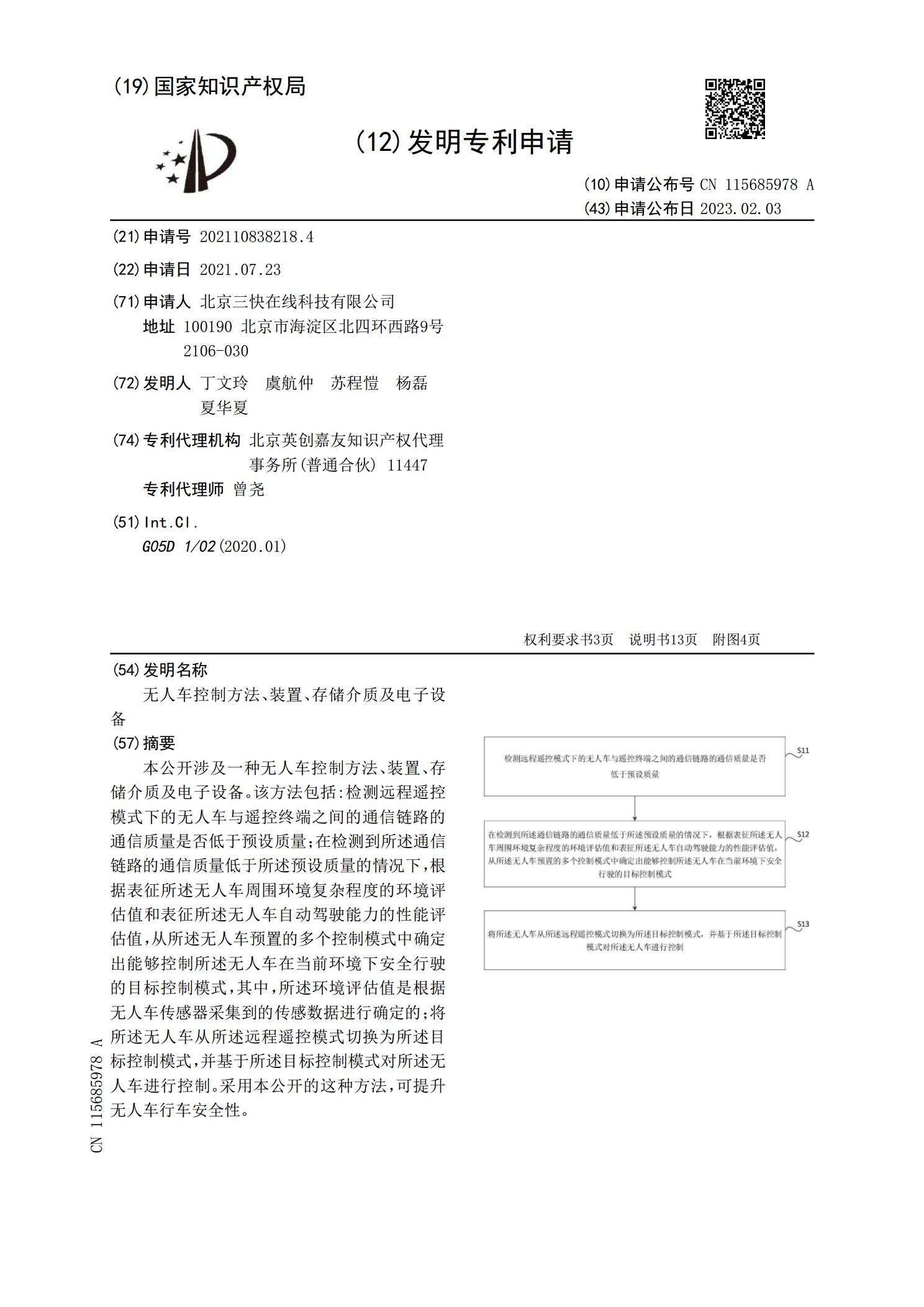
本公开涉及一种无人车控制方法、装置、存储介质及电子设备。该方法包括:检测远程遥控模式下的无人车与遥控终端之间的通信链路的通信质量是否低于预设质量;在检测到所述通信链路的通信质量低于所述预设质量的情况下,根据表征所述无人车周围环境复杂程度的环境评估值和表征所述无人车自动驾驶能力的性能评估值,从所述无人车预置的多个控制模式中确定出能够控制所述无人车在当前环境下安全行驶的目标控制模式,其中,所述环境评估值是根据无人车传感器采集到的传感数据进行确定的;将所述无人车从所述远程遥控模式切换为所述目标控制模式,并基于所
无人车的控制方法、装置、存储介质及电子设备.pdf
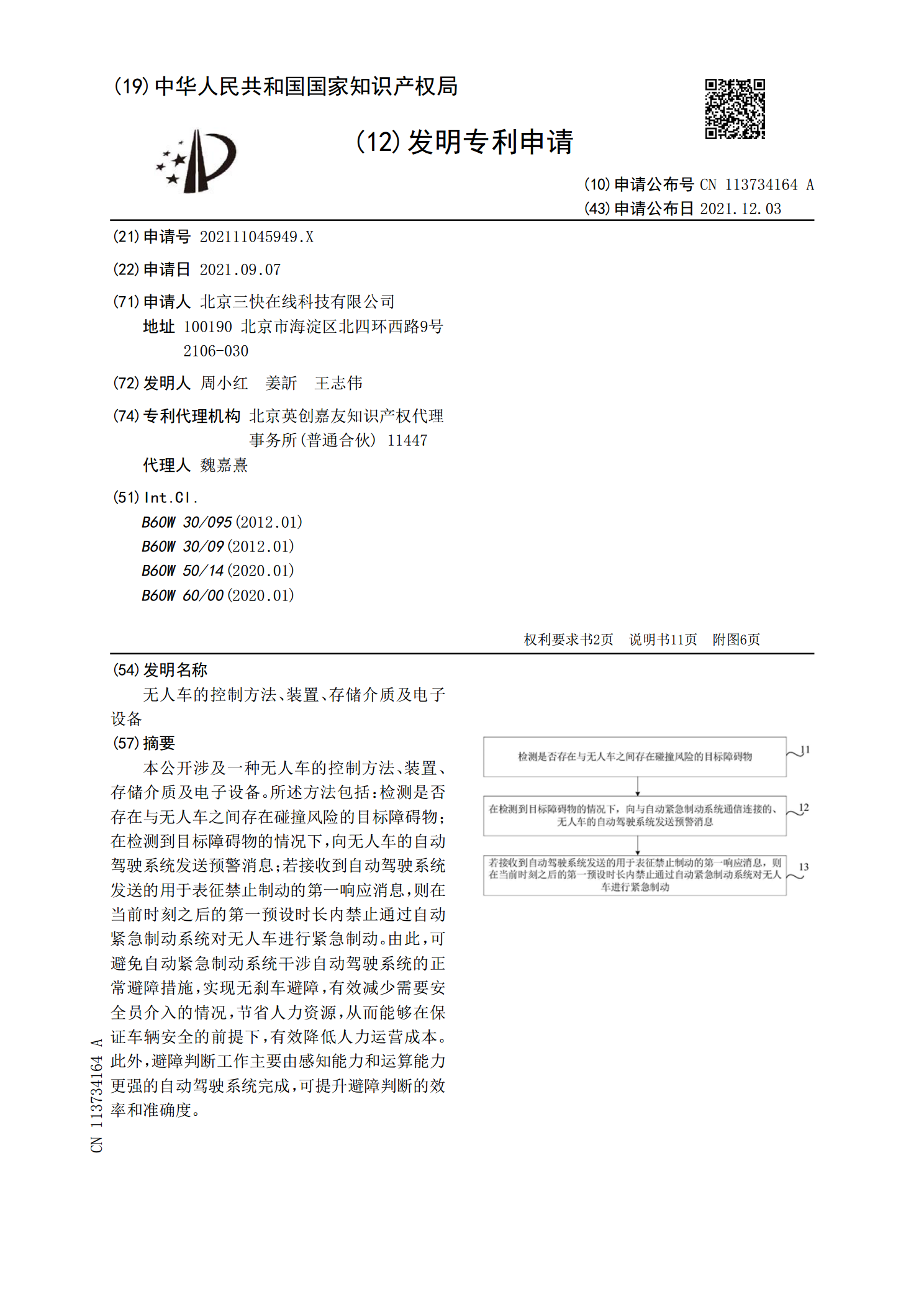
本公开涉及一种无人车的控制方法、装置、存储介质及电子设备。所述方法包括:检测是否存在与无人车之间存在碰撞风险的目标障碍物;在检测到目标障碍物的情况下,向无人车的自动驾驶系统发送预警消息;若接收到自动驾驶系统发送的用于表征禁止制动的第一响应消息,则在当前时刻之后的第一预设时长内禁止通过自动紧急制动系统对无人车进行紧急制动。由此,可避免自动紧急制动系统干涉自动驾驶系统的正常避障措施,实现无刹车避障,有效减少需要安全员介入的情况,节省人力资源,从而能够在保证车辆安全的前提下,有效降低人力运营成本。此外,避障判断
无人车的控制方法、装置、存储介质及电子设备.pdf
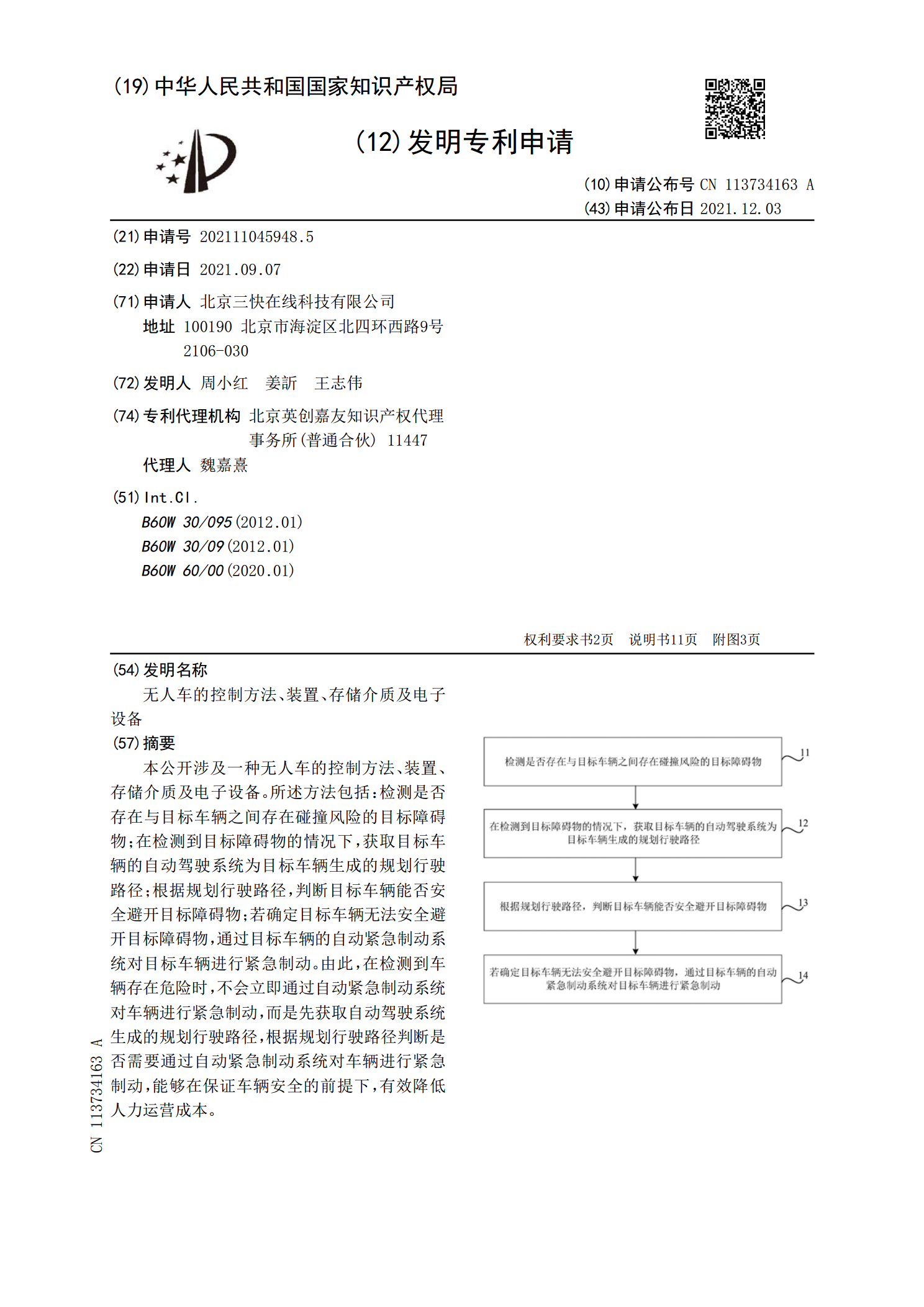
本公开涉及一种无人车的控制方法、装置、存储介质及电子设备。所述方法包括:检测是否存在与目标车辆之间存在碰撞风险的目标障碍物;在检测到目标障碍物的情况下,获取目标车辆的自动驾驶系统为目标车辆生成的规划行驶路径;根据规划行驶路径,判断目标车辆能否安全避开目标障碍物;若确定目标车辆无法安全避开目标障碍物,通过目标车辆的自动紧急制动系统对目标车辆进行紧急制动。由此,在检测到车辆存在危险时,不会立即通过自动紧急制动系统对车辆进行紧急制动,而是先获取自动驾驶系统生成的规划行驶路径,根据规划行驶路径判断是否需要通过自动