
一种植物表型监测装置与方法.pdf

宜欣****外呢


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种植物表型监测装置与方法.pdf
本发明公开了一种植物表型监测装置与方法,涉及植物生长监测技术领域,该监测装置包括:培养箱、数据采集单元和全波段高光谱物联监测终端;培养箱,用于放置待测植被和容纳数据采集单元;数据采集单元包括:滑台固定板、滑块、第一深度相机、第二深度相机、第一外接光纤、第二外接光纤和三轴龙门滑台;全波段高光谱物联监测终端,分别与第一深度相机、第二深度相机、第一外接光纤、第二外接光纤和三轴龙门滑台通信连接,用于控制三轴龙门滑台移动;获取特征波段范围的光谱表型数据和各待测点位置的外观二维表型数据。通过本发明能够实现自动化程度高

一种作物表型监测装置及系统.pdf
本发明涉及农作物监测技术领域,公开了一种作物表型监测装置及系统,包括:底座,所述底座上设置有用于供电的电源装置及驱动机构;支撑架,可伸缩的设置在所述底座上,所述驱动机构与所述支撑架连接用于控制所述支撑架旋转;以及用于获取作物图像信息的监测成像单元,所述监测成像单元设置在所述支撑架的上端,所述监测成像单元经通讯模块将所述作物图像信息上传到远端服务器。该作物表型监测装置避免了直接测量时对作物样品的破坏,克服了间接测量不能较好地反映作物表型性状的局限性,能够实时、便捷、准确地将所观测的作物图像信息上传至服务器,
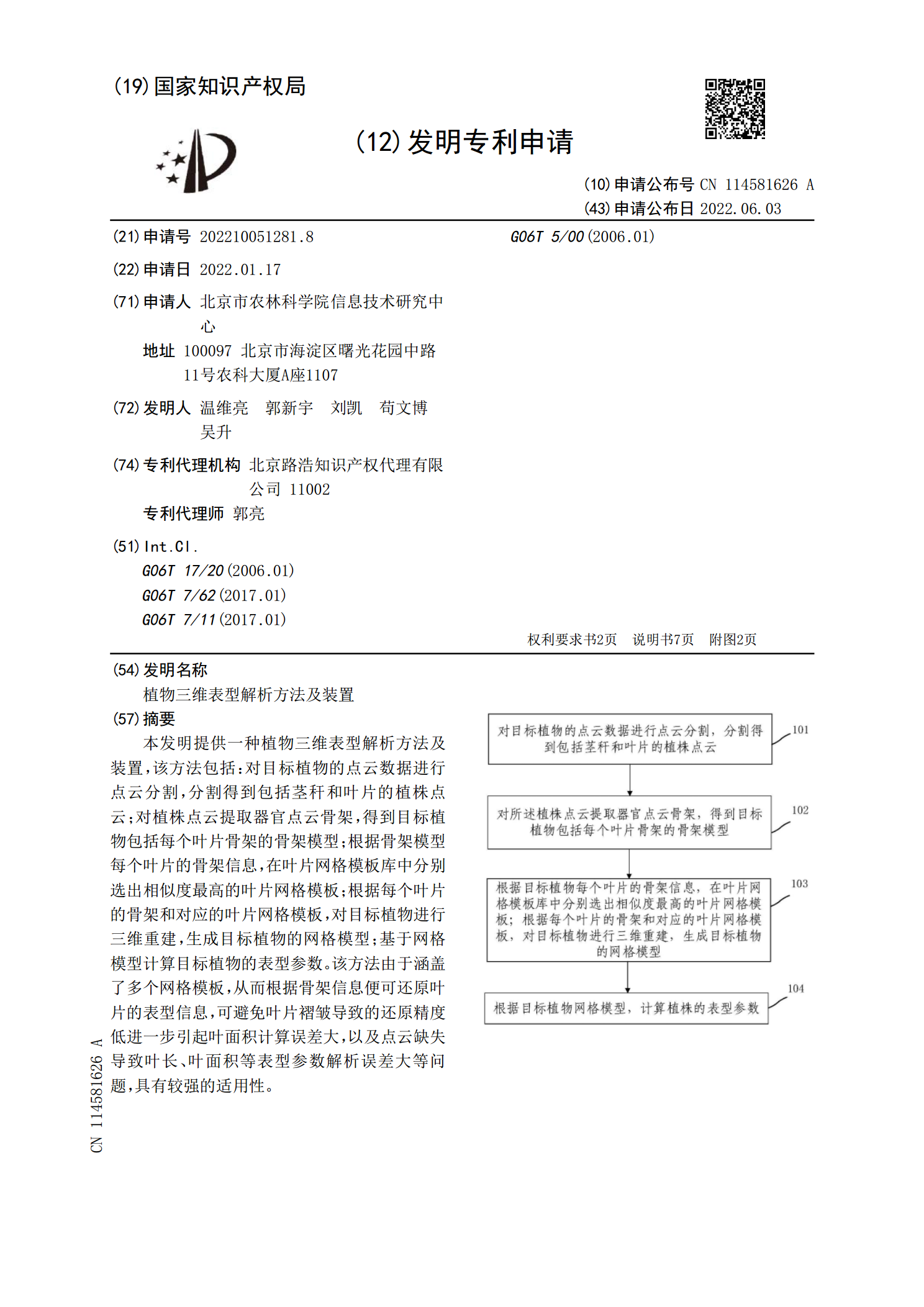
植物三维表型解析方法及装置.pdf
本发明提供一种植物三维表型解析方法及装置,该方法包括:对目标植物的点云数据进行点云分割,分割得到包括茎秆和叶片的植株点云;对植株点云提取器官点云骨架,得到目标植物包括每个叶片骨架的骨架模型;根据骨架模型每个叶片的骨架信息,在叶片网格模板库中分别选出相似度最高的叶片网格模板;根据每个叶片的骨架和对应的叶片网格模板,对目标植物进行三维重建,生成目标植物的网格模型;基于网格模型计算目标植物的表型参数。该方法由于涵盖了多个网格模板,从而根据骨架信息便可还原叶片的表型信息,可避免叶片褶皱导致的还原精度低进一步引起叶
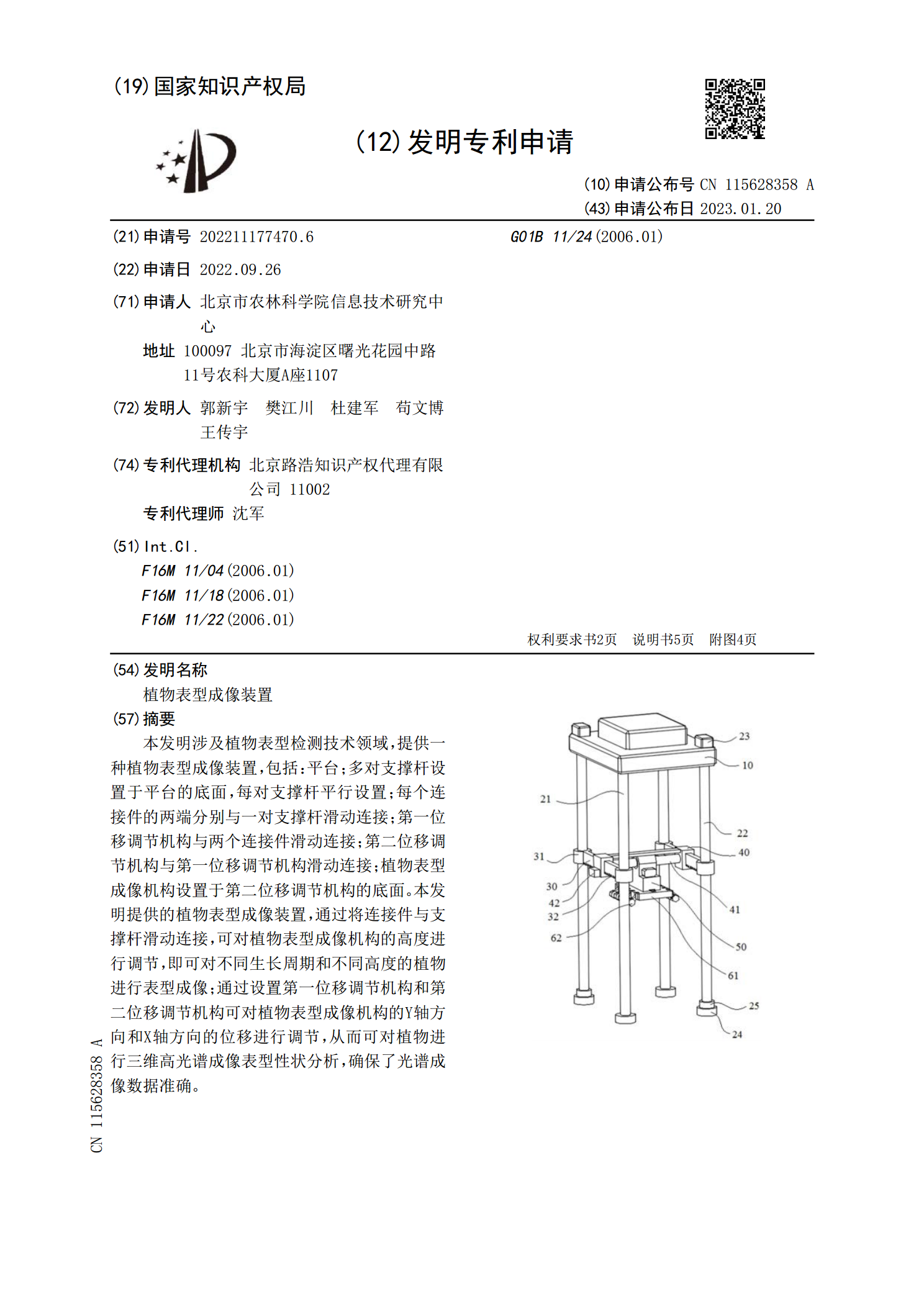
植物表型成像装置.pdf
本发明涉及植物表型检测技术领域,提供一种植物表型成像装置,包括:平台;多对支撑杆设置于平台的底面,每对支撑杆平行设置;每个连接件的两端分别与一对支撑杆滑动连接;第一位移调节机构与两个连接件滑动连接;第二位移调节机构与第一位移调节机构滑动连接;植物表型成像机构设置于第二位移调节机构的底面。本发明提供的植物表型成像装置,通过将连接件与支撑杆滑动连接,可对植物表型成像机构的高度进行调节,即可对不同生长周期和不同高度的植物进行表型成像;通过设置第一位移调节机构和第二位移调节机构可对植物表型成像机构的Y轴方向和X轴

植物表型信息检测装置.pdf
本发明提供一种植物表型信息检测装置,涉及植物表型信息检测技术领域。其包括轨道、行走机构、支撑机构及连接架,两行走机构与两轨道一一对应设置,每一行走机构与一支撑机构相连,支撑机构包括第一支撑杆及第二支撑杆,第一支撑杆与行走机构相连,第二支撑杆可伸缩安装于第一支撑杆,连接架的相对两端与两个第二支撑杆一一对应连接,第二支撑杆和连接架中的至少一个设有拓展板,拓展板用于安装检测元件。其中,轨道更便于铺设与拓展,适合大规模的育种以及植物表型信息的获取,且比传统的传送带更便于维护,降低了成本;拓展板便于拓展安装各种检测