
一种遥控自走式马铃薯联合收获机.pdf

一条****贺6

1/10
2/10

3/10

4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种遥控自走式马铃薯联合收获机.pdf
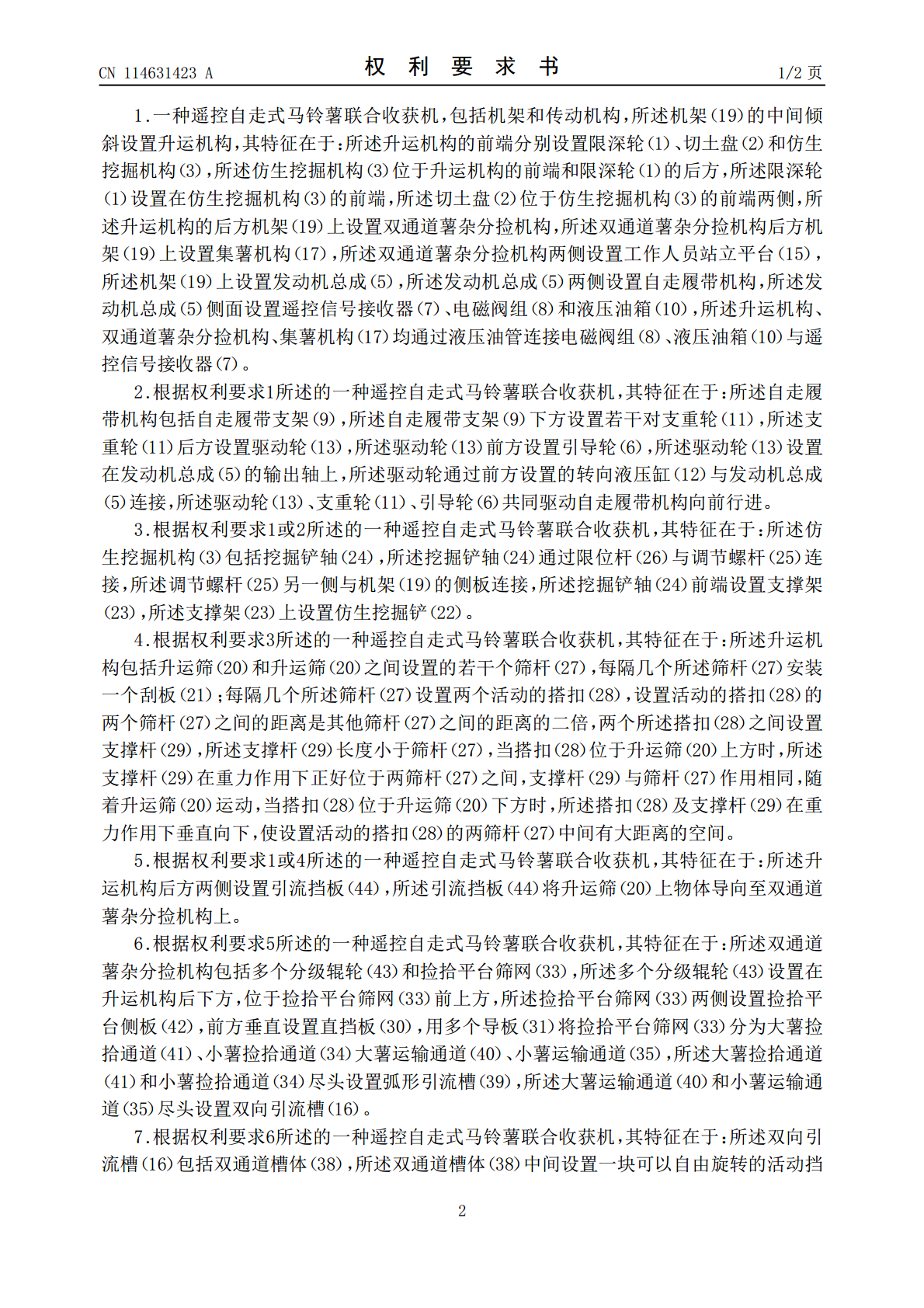
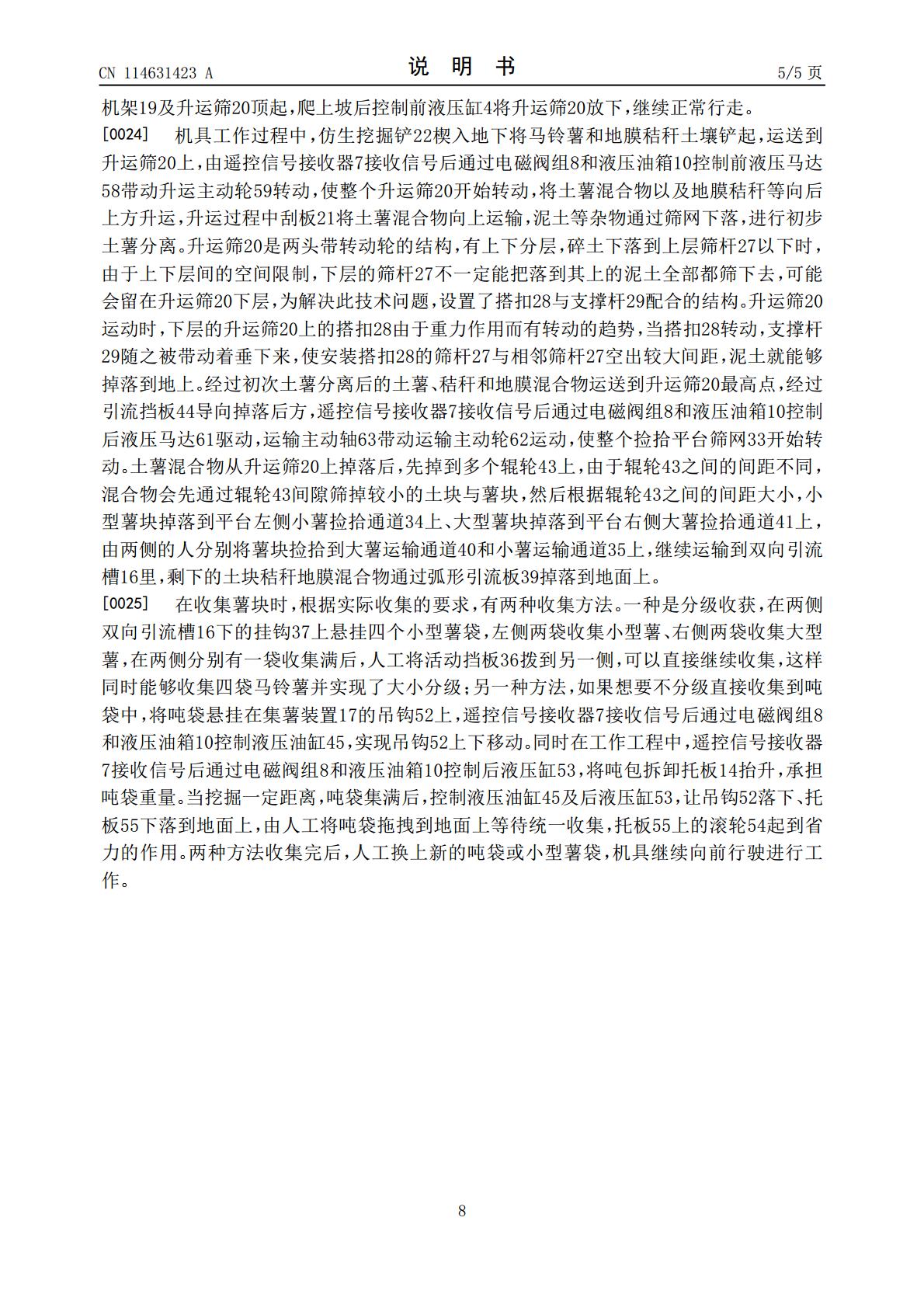
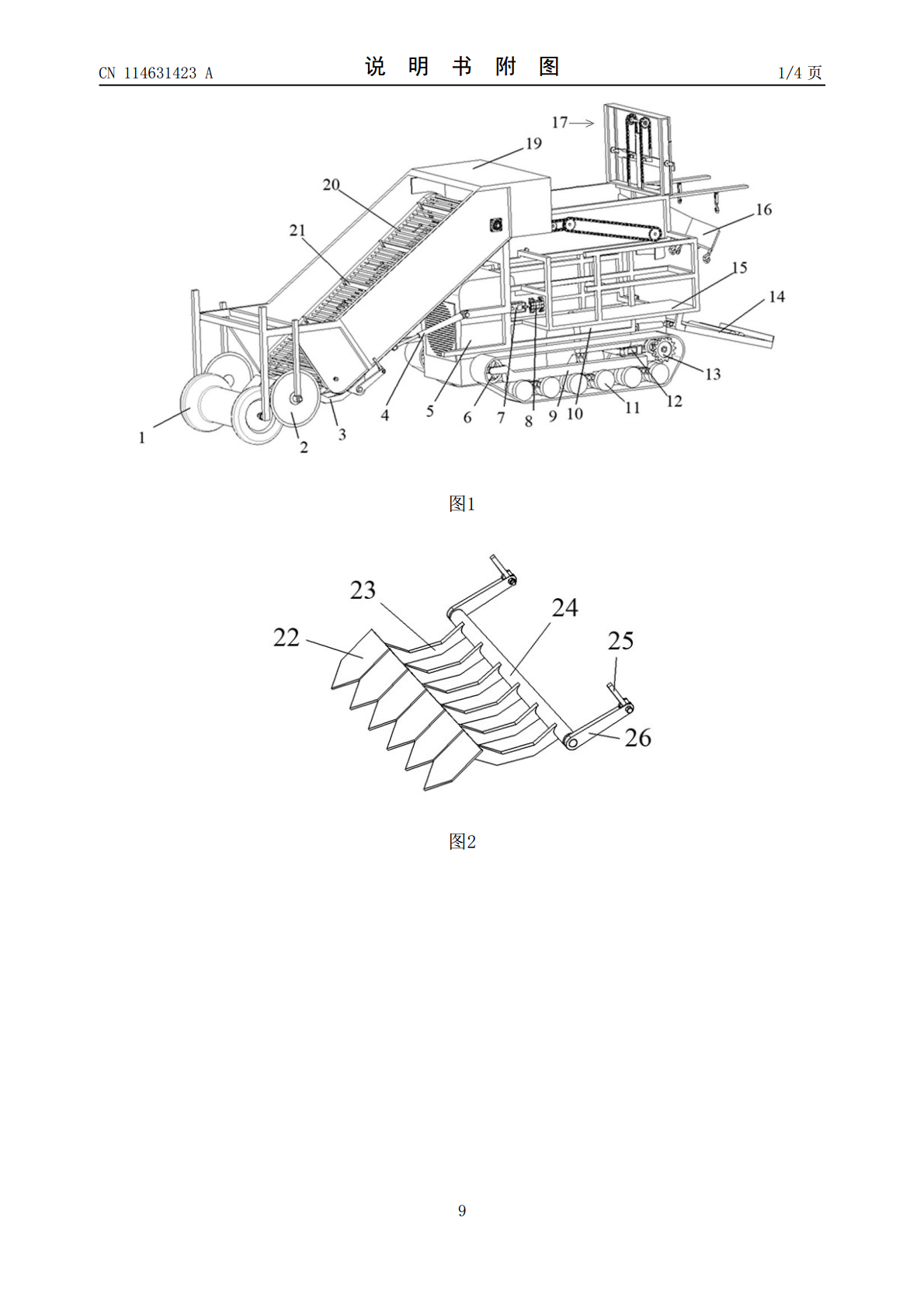
本发明是一种遥控自走式马铃薯联合收获机,包括机架和传动机构,机架的中间倾斜设置升运机构,仿生挖掘机构位于升运机构的前端和限深轮的后方,升运机构的后方设置双通道薯杂分捡机构,机架上设置集薯机构,所述双通道薯杂分捡机构两侧设置工作人员站立平台,机架上设置发动机总成,发动机总成两侧设置自走履带机构,升运机构、双通道薯杂分捡机构、集薯机构均连接电磁阀组、液压油箱与遥控信号接收器。本发明提供的马铃薯联合收获机采用了遥控自走式机构与自主分级集薯装置,改变了目前马铃薯收获机具牵引式工作以及挖掘后需要人工捡拾的现状,真正

自走式马铃薯收获机.pdf
本发明涉及一种自走式马铃薯收获机。本发明的输送带通过主动轴和从动轴与主机架连接,链式摇筛一端与输送带对接,另一端与转向输送带对接,转向输送带输送端与提升输送器对接,主动轴与液压马达联接。本发明优点在于:将马铃薯收获机与牵引收获机的拖拉机一体化,不再需要专人捡拾收获好的马铃薯,实现了马铃薯收获与捡拾的机械化,同时将犁铲移到整个机器中部,替代原有马铃薯收获机中拖拉机牵引收获机的方式,解决了马铃薯漏挖和拖拉机头部向上跳动的问题,使用液压马达与主动轴相连的方式替代原有马铃薯收获机齿轮与链条的连接方式,减少了零件的
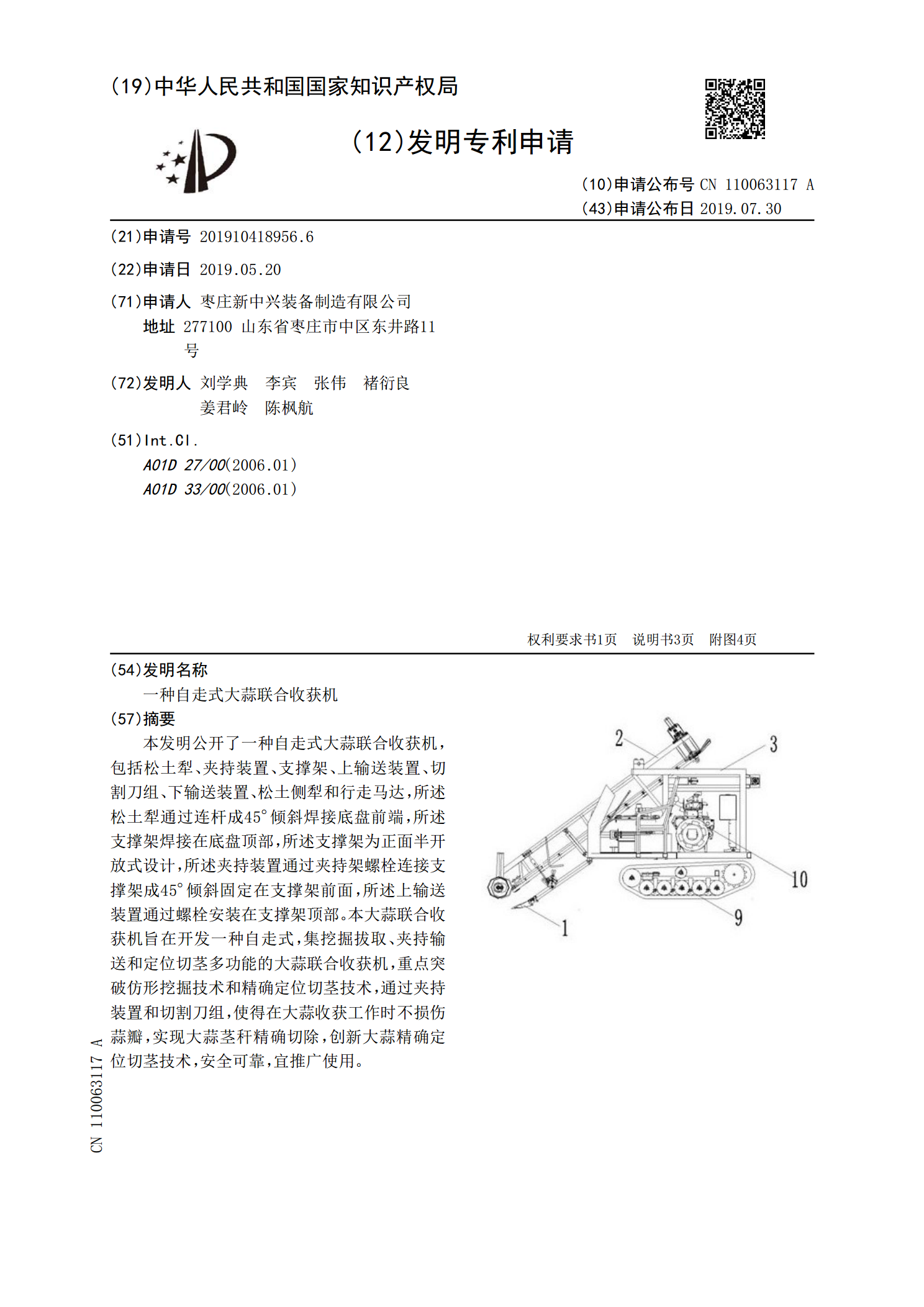
一种自走式大蒜联合收获机.pdf
本发明公开了一种自走式大蒜联合收获机,包括松土犁、夹持装置、支撑架、上输送装置、切割刀组、下输送装置、松土侧犁和行走马达,所述松土犁通过连杆成45°倾斜焊接底盘前端,所述支撑架焊接在底盘顶部,所述支撑架为正面半开放式设计,所述夹持装置通过夹持架螺栓连接支撑架成45°倾斜固定在支撑架前面,所述上输送装置通过螺栓安装在支撑架顶部。本大蒜联合收获机旨在开发一种自走式,集挖掘拔取、夹持输送和定位切茎多功能的大蒜联合收获机,重点突破仿形挖掘技术和精确定位切茎技术,通过夹持装置和切割刀组,使得在大蒜收获工作时不损伤蒜
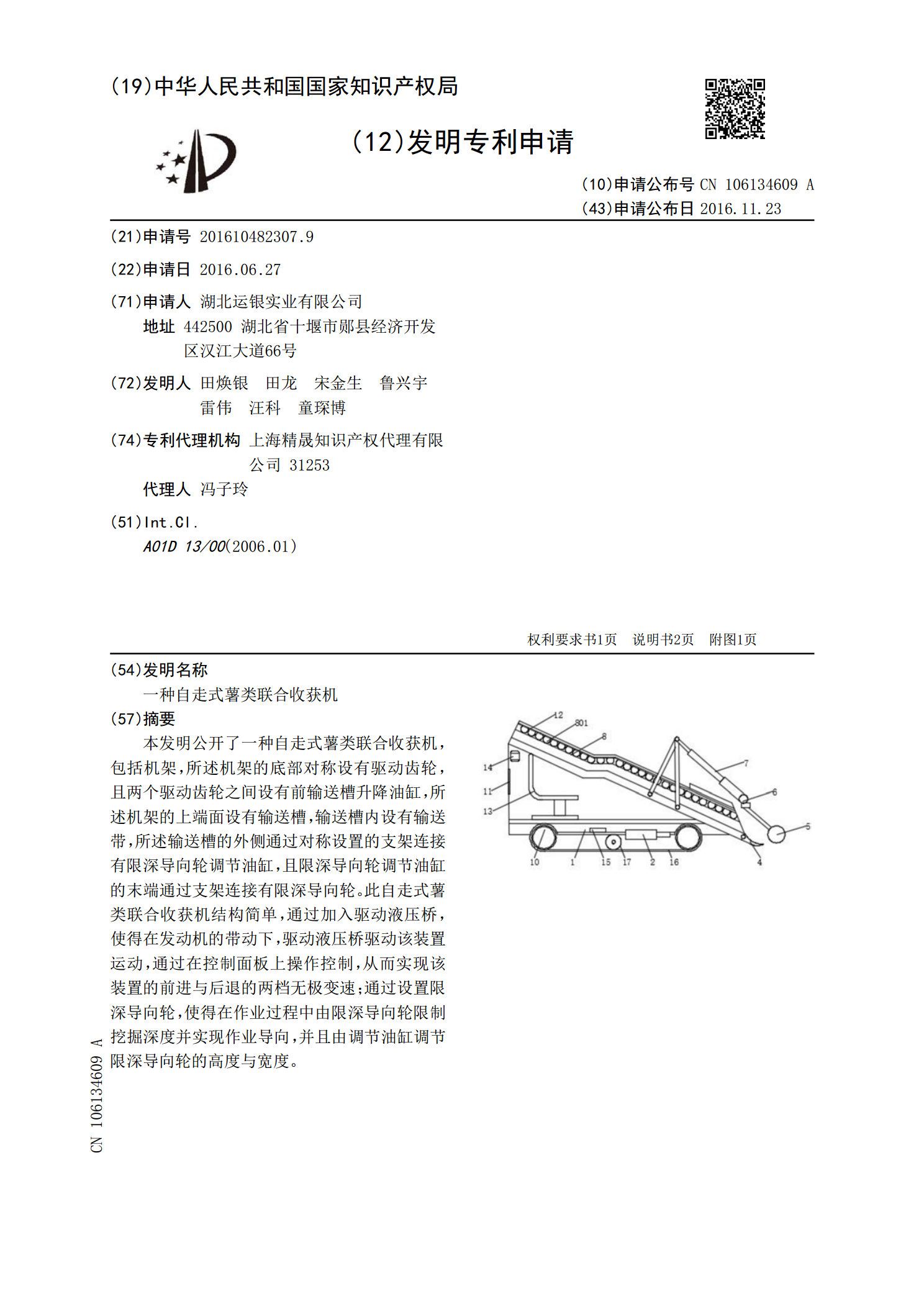
一种自走式薯类联合收获机.pdf
本发明公开了一种自走式薯类联合收获机,包括机架,所述机架的底部对称设有驱动齿轮,且两个驱动齿轮之间设有前输送槽升降油缸,所述机架的上端面设有输送槽,输送槽内设有输送带,所述输送槽的外侧通过对称设置的支架连接有限深导向轮调节油缸,且限深导向轮调节油缸的末端通过支架连接有限深导向轮。此自走式薯类联合收获机结构简单,通过加入驱动液压桥,使得在发动机的带动下,驱动液压桥驱动该装置运动,通过在控制面板上操作控制,从而实现该装置的前进与后退的两档无极变速;通过设置限深导向轮,使得在作业过程中由限深导向轮限制挖掘深度并
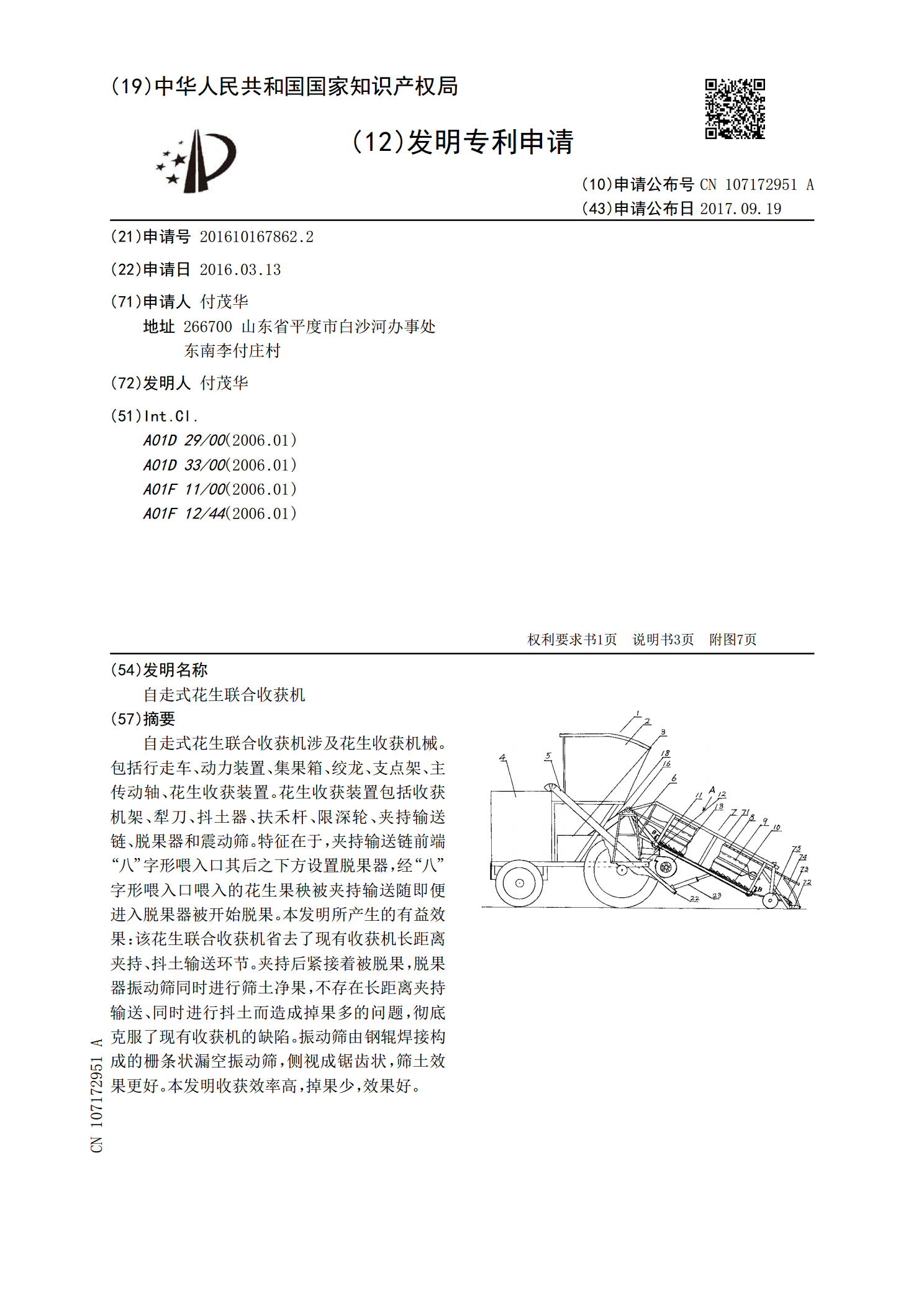
自走式花生联合收获机.pdf
自走式花生联合收获机涉及花生收获机械。包括行走车、动力装置、集果箱、绞龙、支点架、主传动轴、花生收获装置。花生收获装置包括收获机架、犁刀、抖土器、扶禾杆、限深轮、夹持输送链、脱果器和震动筛。特征在于,夹持输送链前端“八”字形喂入口其后之下方设置脱果器,经“八”字形喂入口喂入的花生果秧被夹持输送随即便进入脱果器被开始脱果。本发明所产生的有益效果:该花生联合收获机省去了现有收获机长距离夹持、抖土输送环节。夹持后紧接着被脱果,脱果器振动筛同时进行筛土净果,不存在长距离夹持输送、同时进行抖土而造成掉果多的问题,彻