
一种水果采摘机器人.pdf

爱欢****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种水果采摘装置及水果采摘机器人.pdf
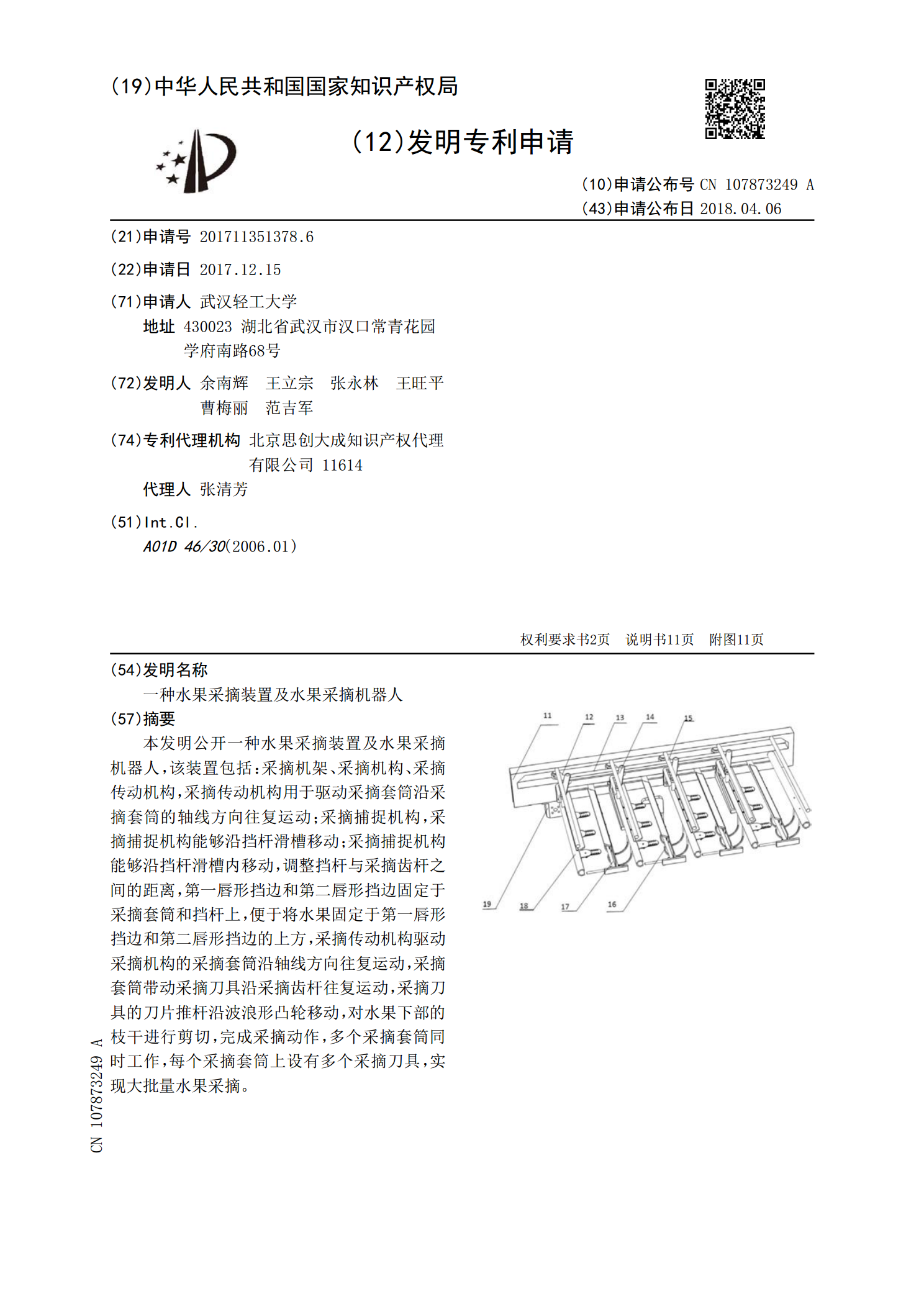
本发明公开一种水果采摘装置及水果采摘机器人,该装置包括:采摘机架、采摘机构、采摘传动机构,采摘传动机构用于驱动采摘套筒沿采摘套筒的轴线方向往复运动;采摘捕捉机构,采摘捕捉机构能够沿挡杆滑槽移动;采摘捕捉机构能够沿挡杆滑槽内移动,调整挡杆与采摘齿杆之间的距离,第一唇形挡边和第二唇形挡边固定于采摘套筒和挡杆上,便于将水果固定于第一唇形挡边和第二唇形挡边的上方,采摘传动机构驱动采摘机构的采摘套筒沿轴线方向往复运动,采摘套筒带动采摘刀具沿采摘齿杆往复运动,采摘刀具的刀片推杆沿波浪形凸轮移动,对水果下部的枝干进行剪
一种水果采摘机器人及其采摘方法.pdf
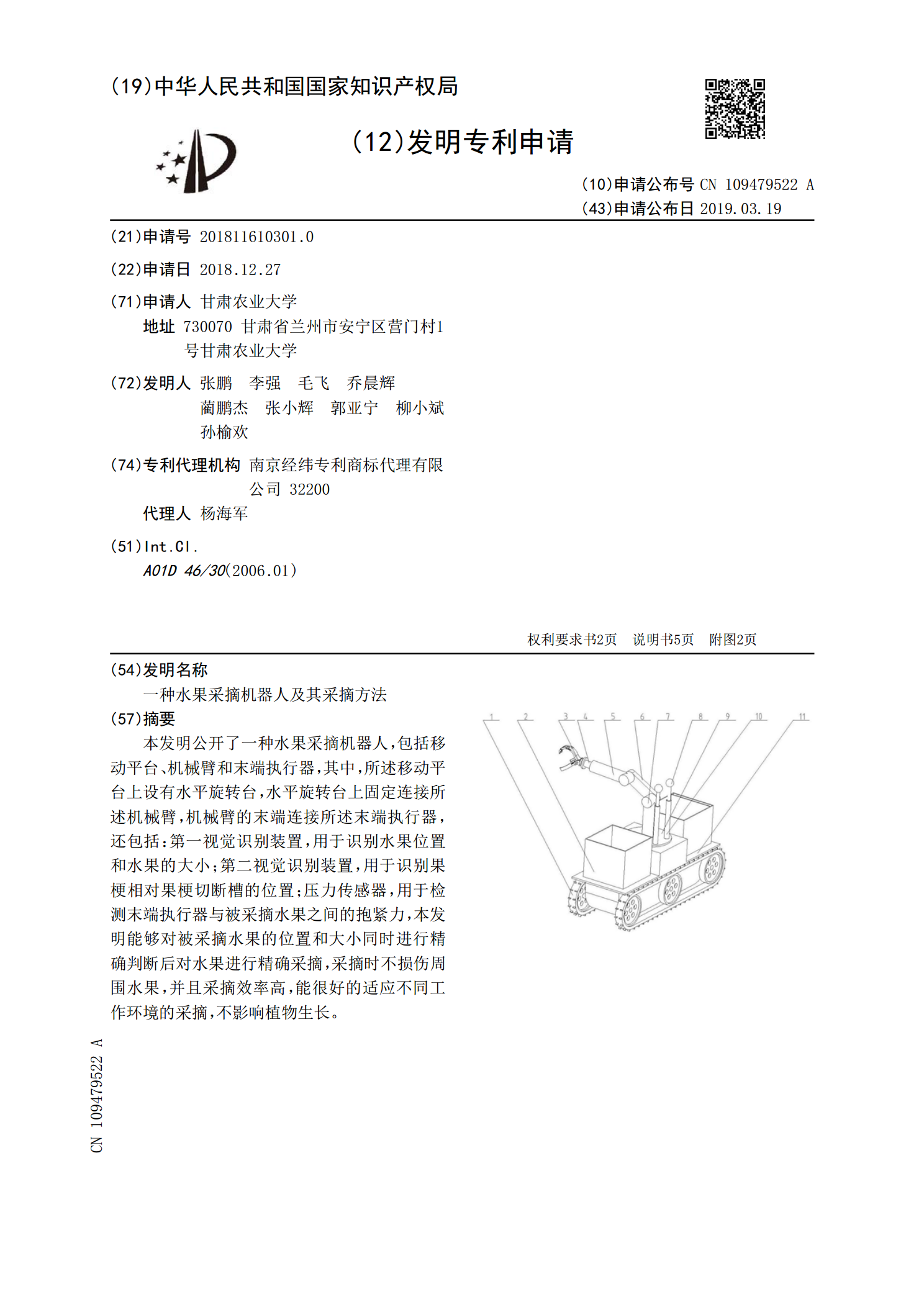
本发明公开了一种水果采摘机器人,包括移动平台、机械臂和末端执行器,其中,所述移动平台上设有水平旋转台,水平旋转台上固定连接所述机械臂,机械臂的末端连接所述末端执行器,还包括:第一视觉识别装置,用于识别水果位置和水果的大小;第二视觉识别装置,用于识别果梗相对果梗切断槽的位置;压力传感器,用于检测末端执行器与被采摘水果之间的抱紧力,本发明能够对被采摘水果的位置和大小同时进行精确判断后对水果进行精确采摘,采摘时不损伤周围水果,并且采摘效率高,能很好的适应不同工作环境的采摘,不影响植物生长。

一种水果采摘机器人.pdf
本发明公开了一种水果采摘机器人,包括载具、机械臂、机械爪、爪座和爪驱动组件;机械臂安装在载具上,爪座安装在机械臂上,机械爪包括驱动轴,驱动轴插在爪座内,爪驱动组件包括套管、传动机构、驱动器、横管、拨杆和弹簧,所述套管与驱动轴同心,驱动器通过传动机构驱动套管旋转,套管的内壁设置有连续的波浪形隆起部,横管固定在驱动轴的径向,弹簧和拨杆均位于横管内,在弹簧的作用下拨杆的一端位于波浪形隆起部的波峰之间,本发明的水果采摘机器人通过波浪形隆起部和拨杆实现套管与驱动轴之间的传动,当机械爪抓握水果之后,拨杆自动缩回,无需

一种水果采摘机器人.pdf
本发明公开了一种水果采摘机器人,包括:抓握部分、手臂部分、果梗剪切部分、视觉系统、升降部分、旋转部分和移动底座;所述抓握部分与手臂部分连接,所述手臂部分与升降部分连接,所述视觉系统位于抓握部分上方与所述手臂部分连接,所述果梗剪切部分与手臂部分连接,所述升降部分与旋转部分连接,所述旋转部分与移动底座连接;本发明结构精巧,灵活度高,工作空间大,利用S型压力传感器,平板压力传感器和拉簧,实现控制器对手指连杆机构Ⅰ的闭环实时控制并柔性抓取目标物,减少采摘时造成的机械损伤;所述升降部分和旋转部分增大了采摘的自由度,
一种水果采摘智能机器人.pdf
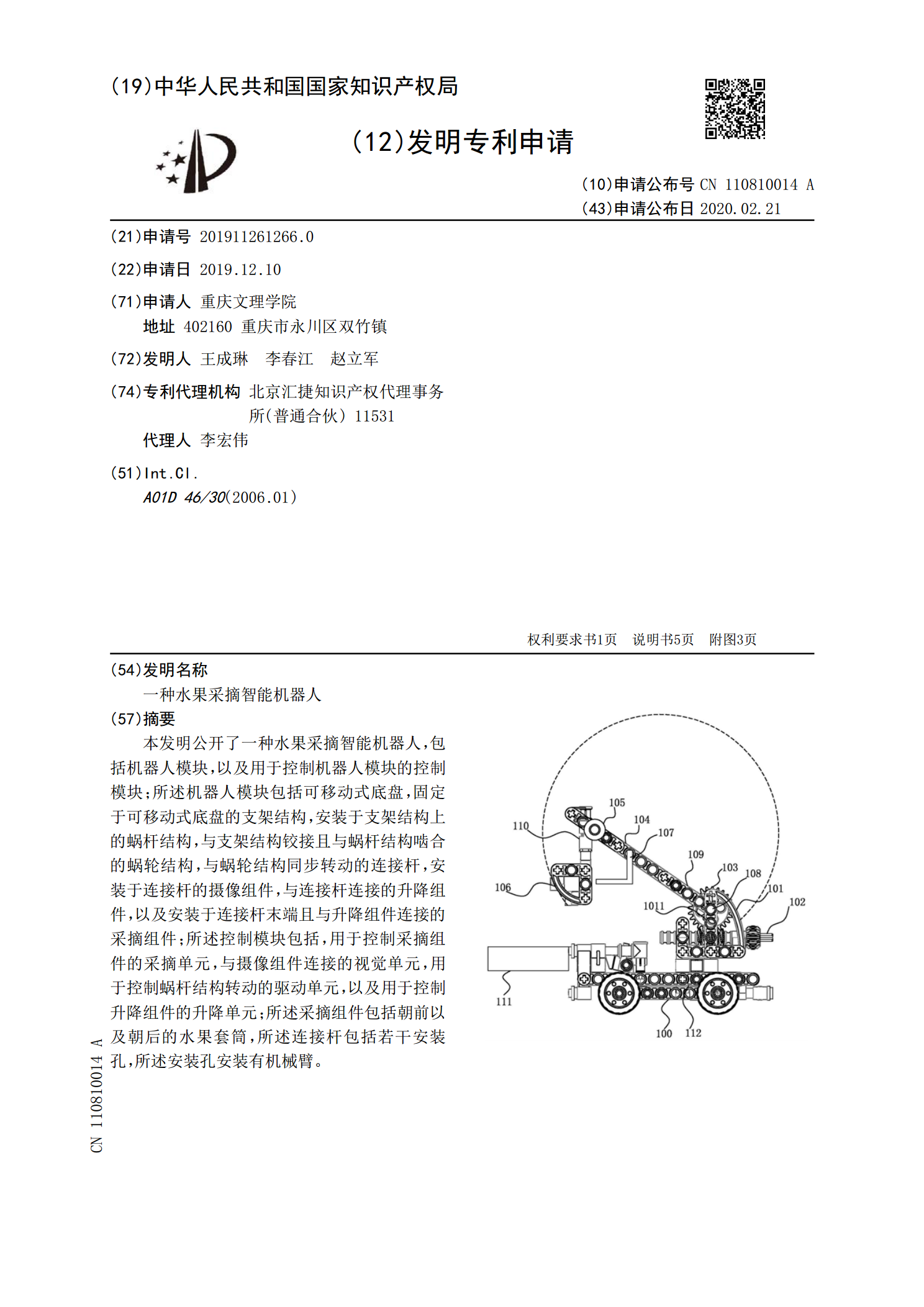
本发明公开了一种水果采摘智能机器人,包括机器人模块,以及用于控制机器人模块的控制模块;所述机器人模块包括可移动式底盘,固定于可移动式底盘的支架结构,安装于支架结构上的蜗杆结构,与支架结构铰接且与蜗杆结构啮合的蜗轮结构,与蜗轮结构同步转动的连接杆,安装于连接杆的摄像组件,与连接杆连接的升降组件,以及安装于连接杆末端且与升降组件连接的采摘组件;所述控制模块包括,用于控制采摘组件的采摘单元,与摄像组件连接的视觉单元,用于控制蜗杆结构转动的驱动单元,以及用于控制升降组件的升降单元;所述采摘组件包括朝前以及朝后的水