
应用于各种道路自动驾驶划线的作业车.pdf

猫巷****志敏


1/7
2/7
3/7
4/7
5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
应用于各种道路自动驾驶划线的作业车.pdf
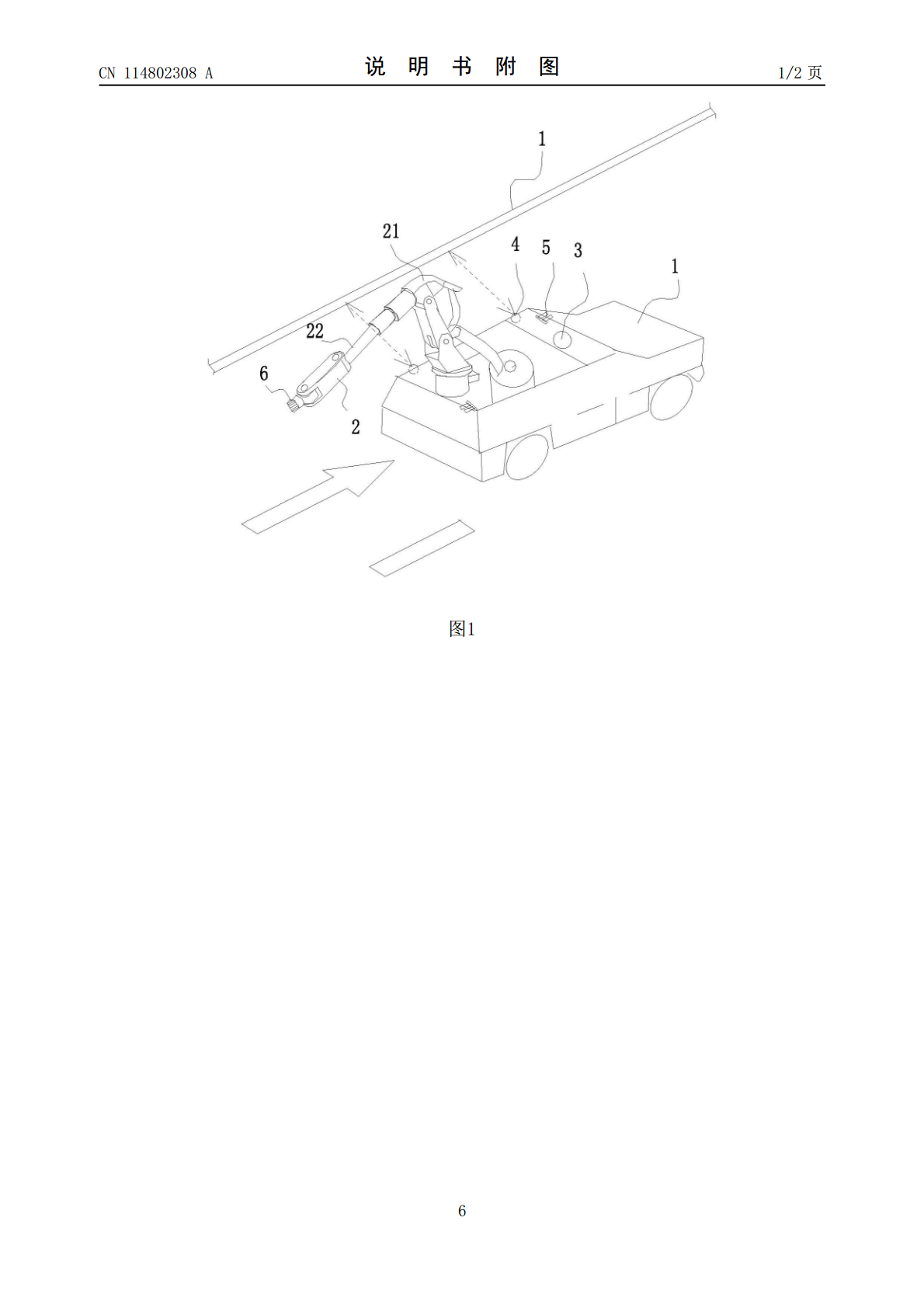
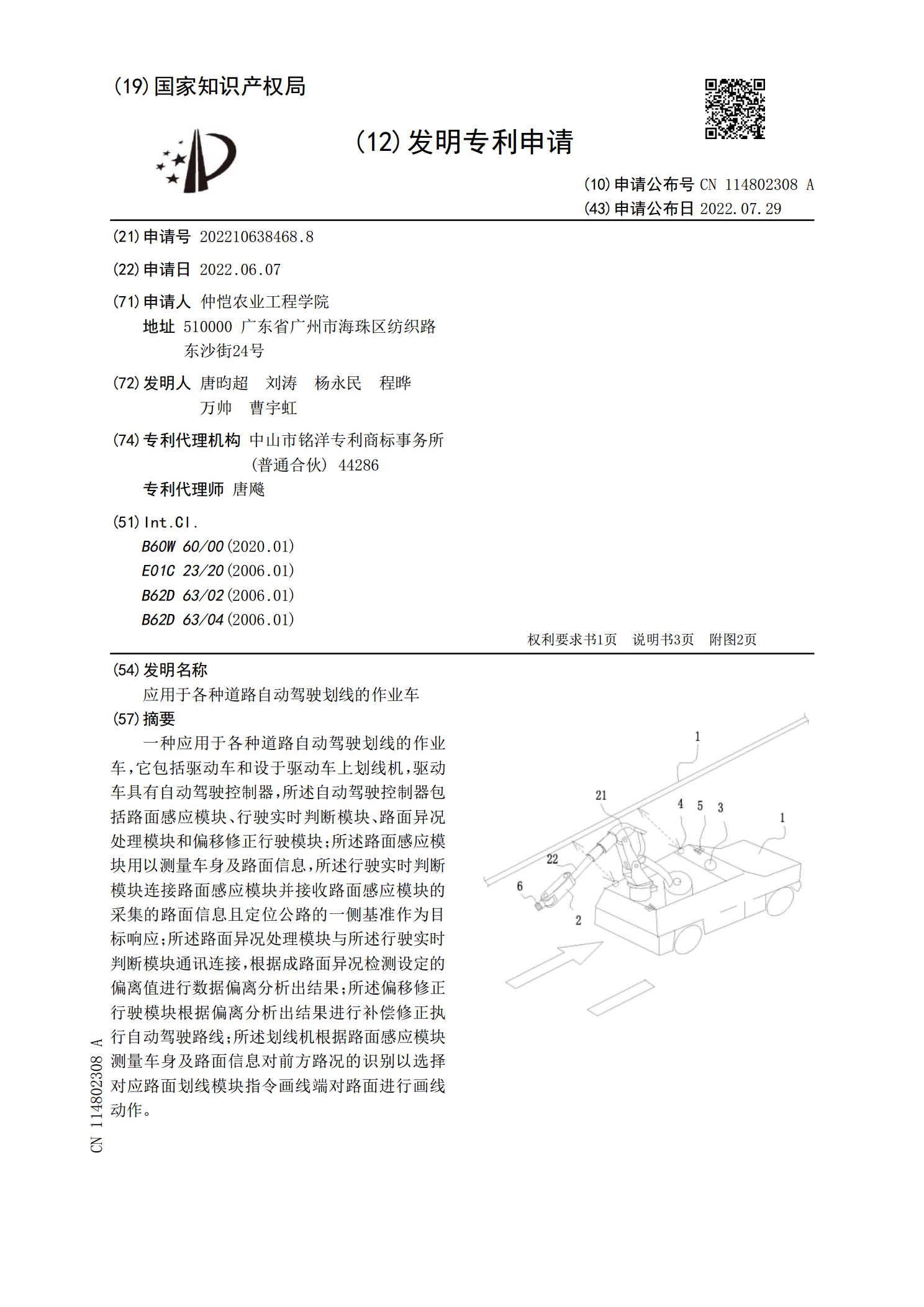
一种应用于各种道路自动驾驶划线的作业车,它包括驱动车和设于驱动车上划线机,驱动车具有自动驾驶控制器,所述自动驾驶控制器包括路面感应模块、行驶实时判断模块、路面异况处理模块和偏移修正行驶模块;所述路面感应模块用以测量车身及路面信息,所述行驶实时判断模块连接路面感应模块并接收路面感应模块的采集的路面信息且定位公路的一侧基准作为目标响应;所述路面异况处理模块与所述行驶实时判断模块通讯连接,根据成路面异况检测设定的偏离值进行数据偏离分析出结果;所述偏移修正行驶模块根据偏离分析出结果进行补偿修正执行自动驾驶路线;所
应用于道路清扫车的自动驾驶系统及其控制方法、装置.pdf
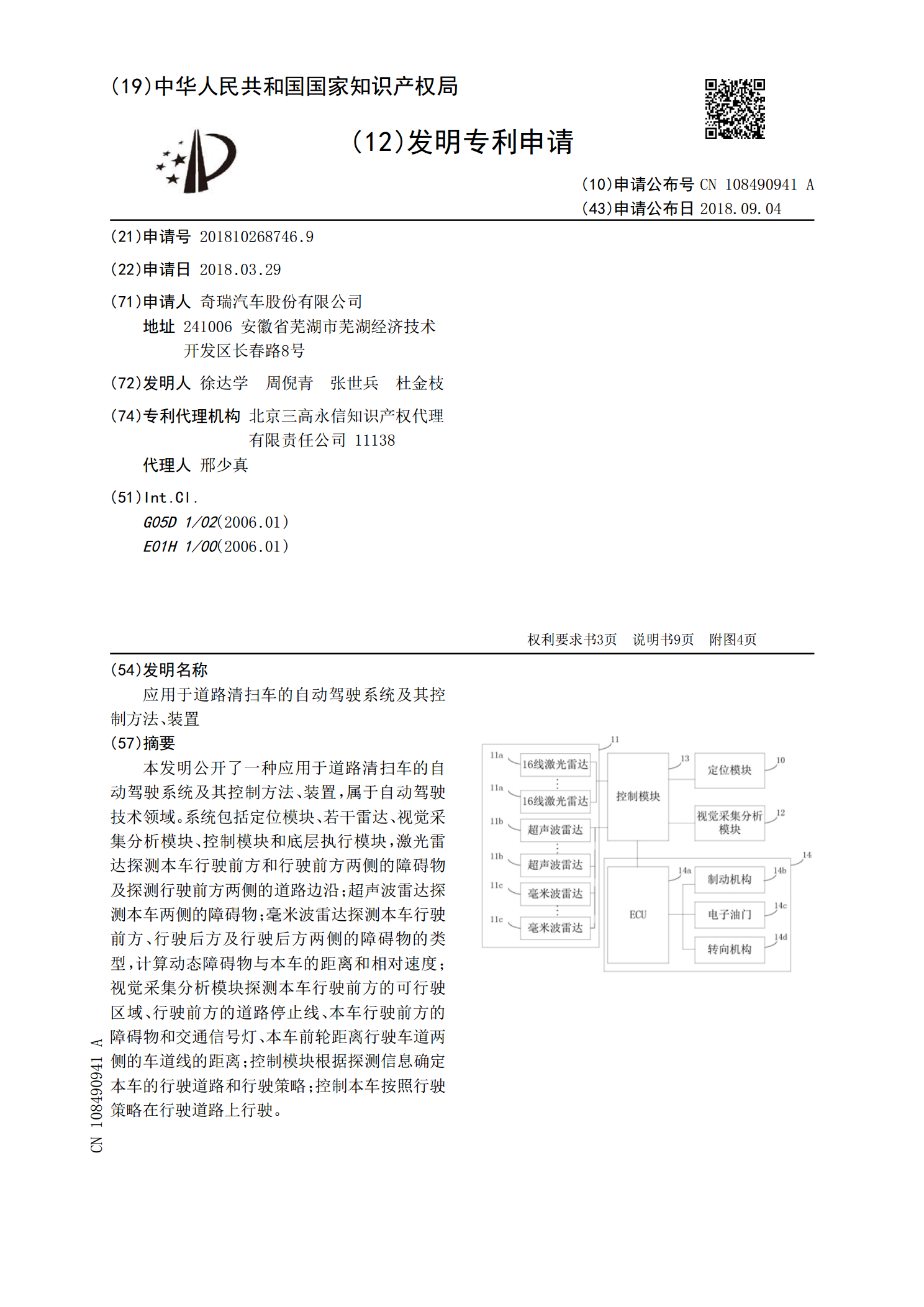
本发明公开了一种应用于道路清扫车的自动驾驶系统及其控制方法、装置,属于自动驾驶技术领域。系统包括定位模块、若干雷达、视觉采集分析模块、控制模块和底层执行模块,激光雷达探测本车行驶前方和行驶前方两侧的障碍物及探测行驶前方两侧的道路边沿;超声波雷达探测本车两侧的障碍物;毫米波雷达探测本车行驶前方、行驶后方及行驶后方两侧的障碍物的类型,计算动态障碍物与本车的距离和相对速度;视觉采集分析模块探测本车行驶前方的可行驶区域、行驶前方的道路停止线、本车行驶前方的障碍物和交通信号灯、本车前轮距离行驶车道两侧的车道线的距离
道路交通标线自动划线车.pdf
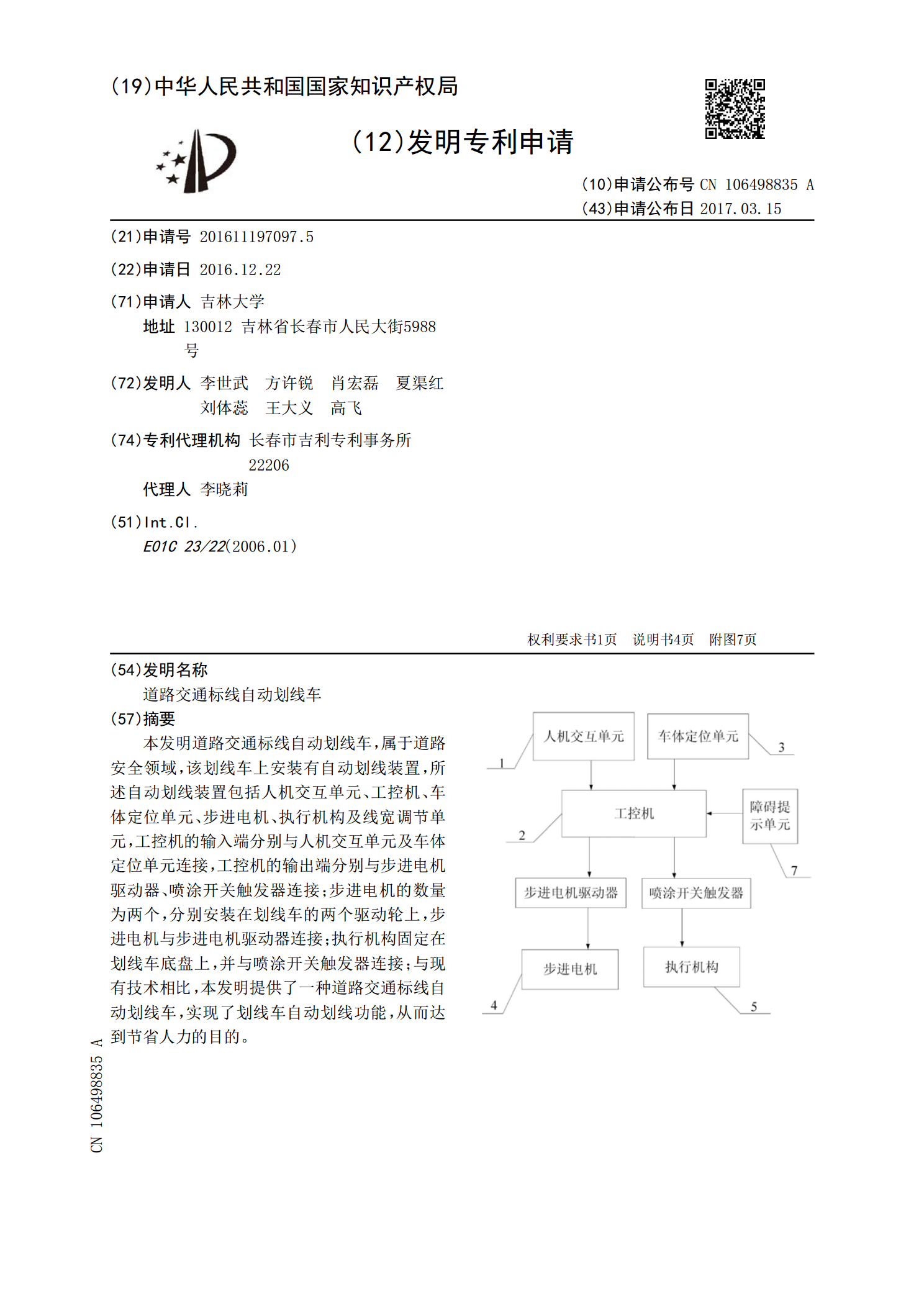
本发明道路交通标线自动划线车,属于道路安全领域,该划线车上安装有自动划线装置,所述自动划线装置包括人机交互单元、工控机、车体定位单元、步进电机、执行机构及线宽调节单元,工控机的输入端分别与人机交互单元及车体定位单元连接,工控机的输出端分别与步进电机驱动器、喷涂开关触发器连接;步进电机的数量为两个,分别安装在划线车的两个驱动轮上,步进电机与步进电机驱动器连接;执行机构固定在划线车底盘上,并与喷涂开关触发器连接;与现有技术相比,本发明提供了一种道路交通标线自动划线车,实现了划线车自动划线功能,从而达到节省人力
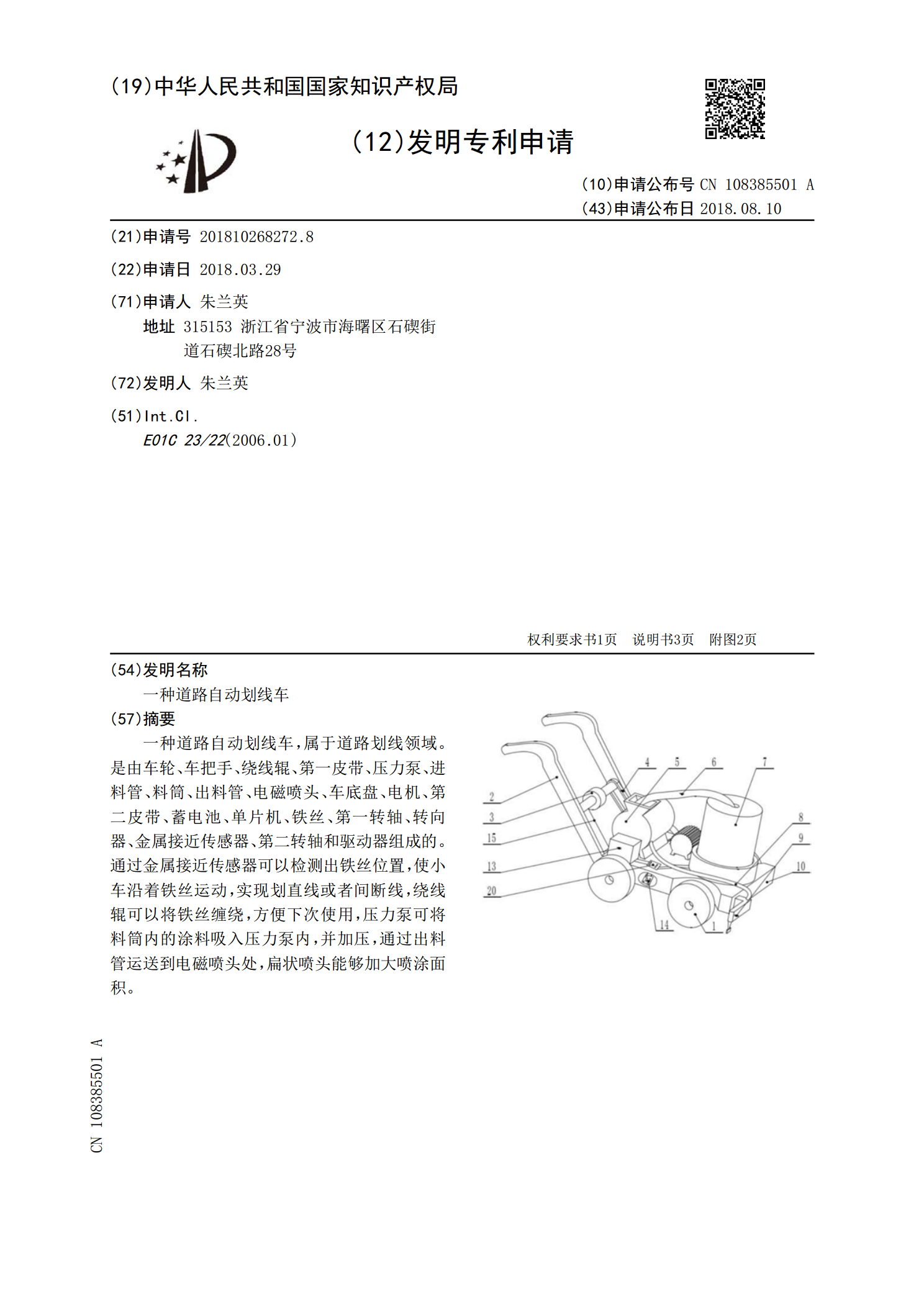
一种道路自动划线车.pdf
一种道路自动划线车,属于道路划线领域。是由车轮、车把手、绕线辊、第一皮带、压力泵、进料管、料筒、出料管、电磁喷头、车底盘、电机、第二皮带、蓄电池、单片机、铁丝、第一转轴、转向器、金属接近传感器、第二转轴和驱动器组成的。通过金属接近传感器可以检测出铁丝位置,使小车沿着铁丝运动,实现划直线或者间断线,绕线辊可以将铁丝缠绕,方便下次使用,压力泵可将料筒内的涂料吸入压力泵内,并加压,通过出料管运送到电磁喷头处,扁状喷头能够加大喷涂面积。
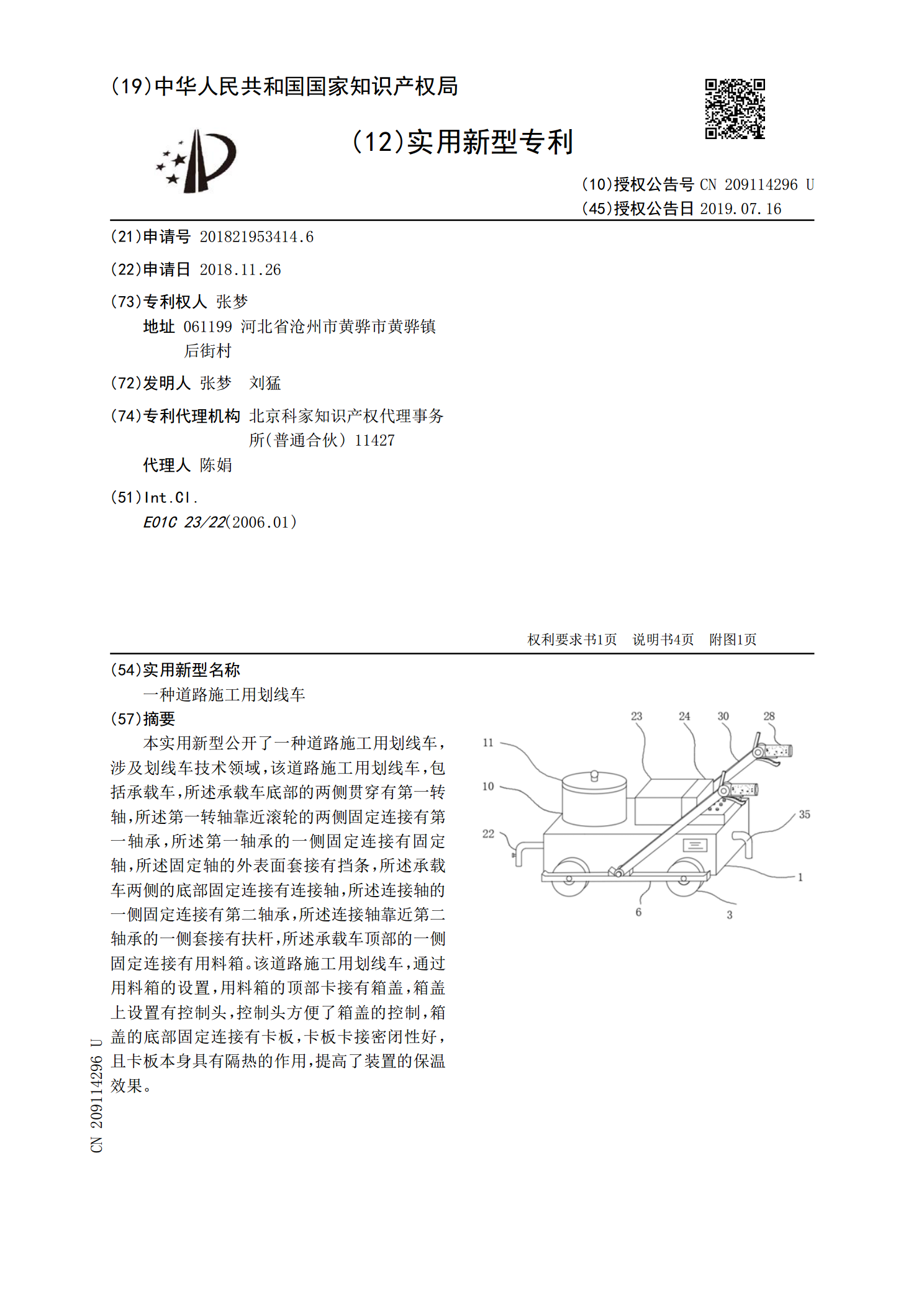
一种道路施工用划线车.pdf
本实用新型公开了一种道路施工用划线车,涉及划线车技术领域,该道路施工用划线车,包括承载车,所述承载车底部的两侧贯穿有第一转轴,所述第一转轴靠近滚轮的两侧固定连接有第一轴承,所述第一轴承的一侧固定连接有固定轴,所述固定轴的外表面套接有挡条,所述承载车两侧的底部固定连接有连接轴,所述连接轴的一侧固定连接有第二轴承,所述连接轴靠近第二轴承的一侧套接有扶杆,所述承载车顶部的一侧固定连接有用料箱。该道路施工用划线车,通过用料箱的设置,用料箱的顶部卡接有箱盖,箱盖上设置有控制头,控制头方便了箱盖的控制,箱盖的底部固定