
一种用于名优茶嫩芽采摘过程的定位方法.pdf

是你****松呀

1/10
2/10

3/10

4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于名优茶嫩芽采摘过程的定位方法.pdf
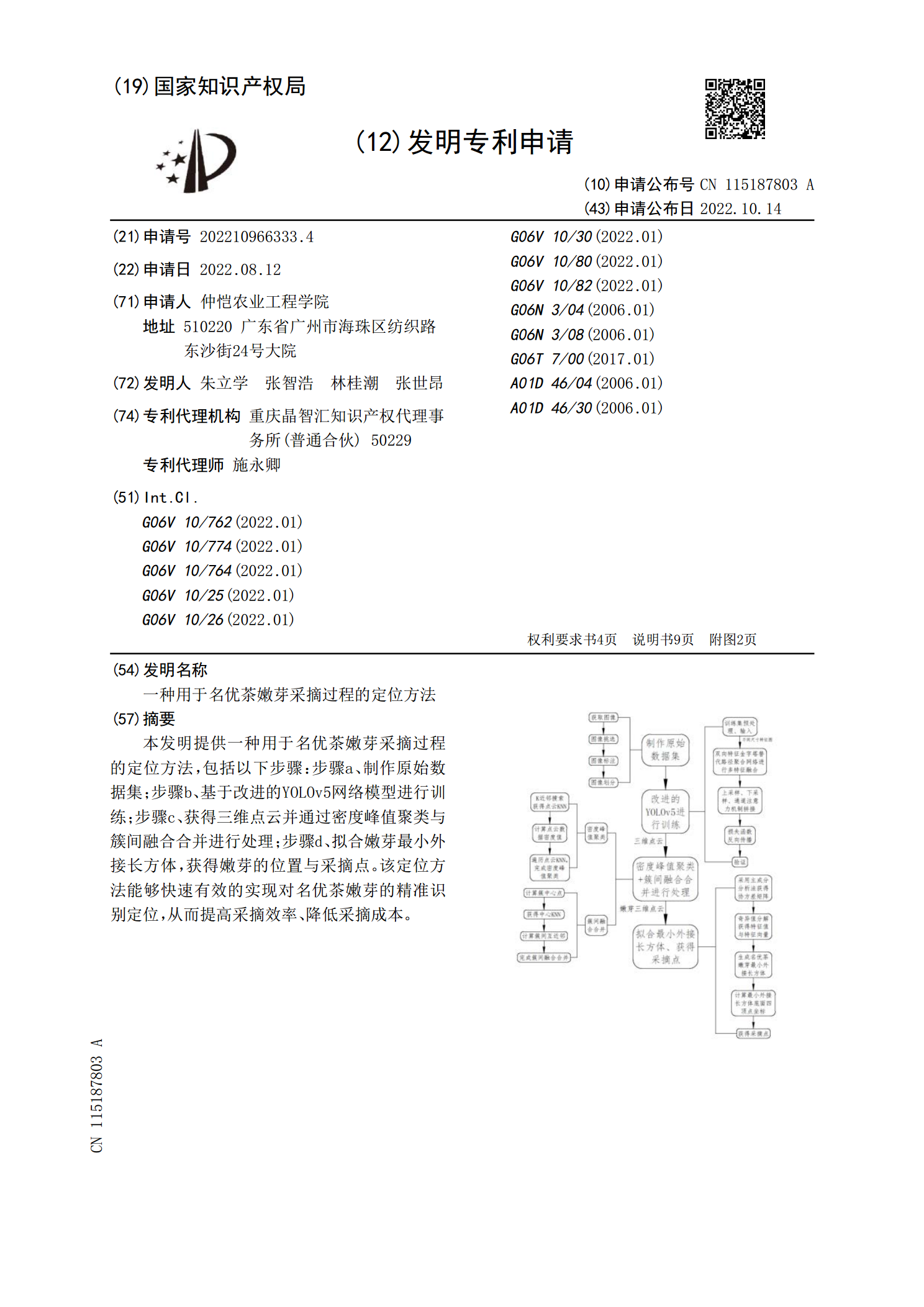
本发明提供一种用于名优茶嫩芽采摘过程的定位方法,包括以下步骤:步骤a、制作原始数据集;步骤b、基于改进的YOLOv5网络模型进行训练;步骤c、获得三维点云并通过密度峰值聚类与簇间融合合并进行处理;步骤d、拟合嫩芽最小外接长方体,获得嫩芽的位置与采摘点。该定位方法能够快速有效的实现对名优茶嫩芽的精准识别定位,从而提高采摘效率、降低采摘成本。
一种用于嫩芽采摘的采摘装置.pdf
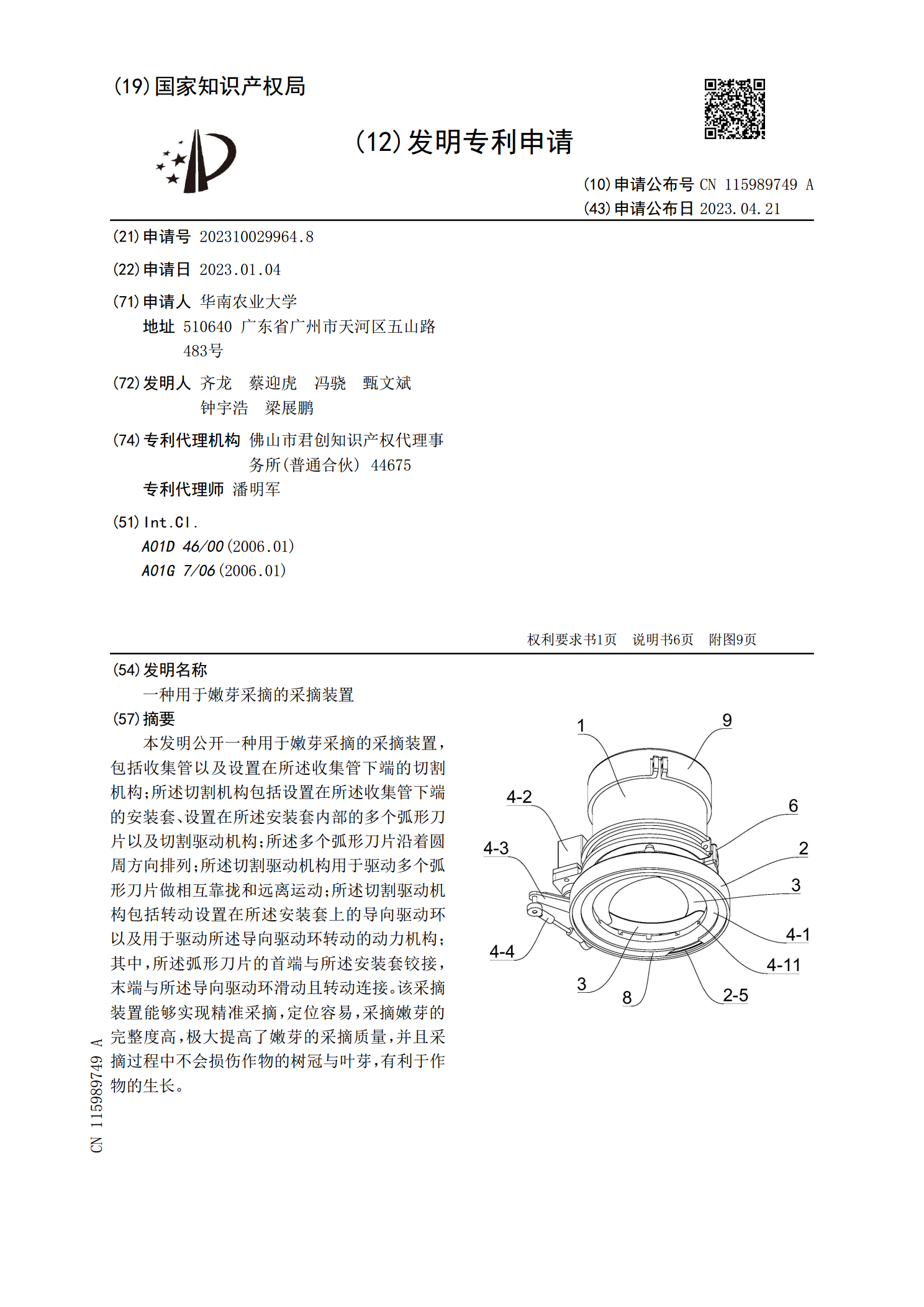
本发明公开一种用于嫩芽采摘的采摘装置,包括收集管以及设置在所述收集管下端的切割机构;所述切割机构包括设置在所述收集管下端的安装套、设置在所述安装套内部的多个弧形刀片以及切割驱动机构;所述多个弧形刀片沿着圆周方向排列;所述切割驱动机构用于驱动多个弧形刀片做相互靠拢和远离运动;所述切割驱动机构包括转动设置在所述安装套上的导向驱动环以及用于驱动所述导向驱动环转动的动力机构;其中,所述弧形刀片的首端与所述安装套铰接,末端与所述导向驱动环滑动且转动连接。该采摘装置能够实现精准采摘,定位容易,采摘嫩芽的完整度高,极大
一种基于深度学习算法的茶叶嫩芽采摘点定位方法.pdf
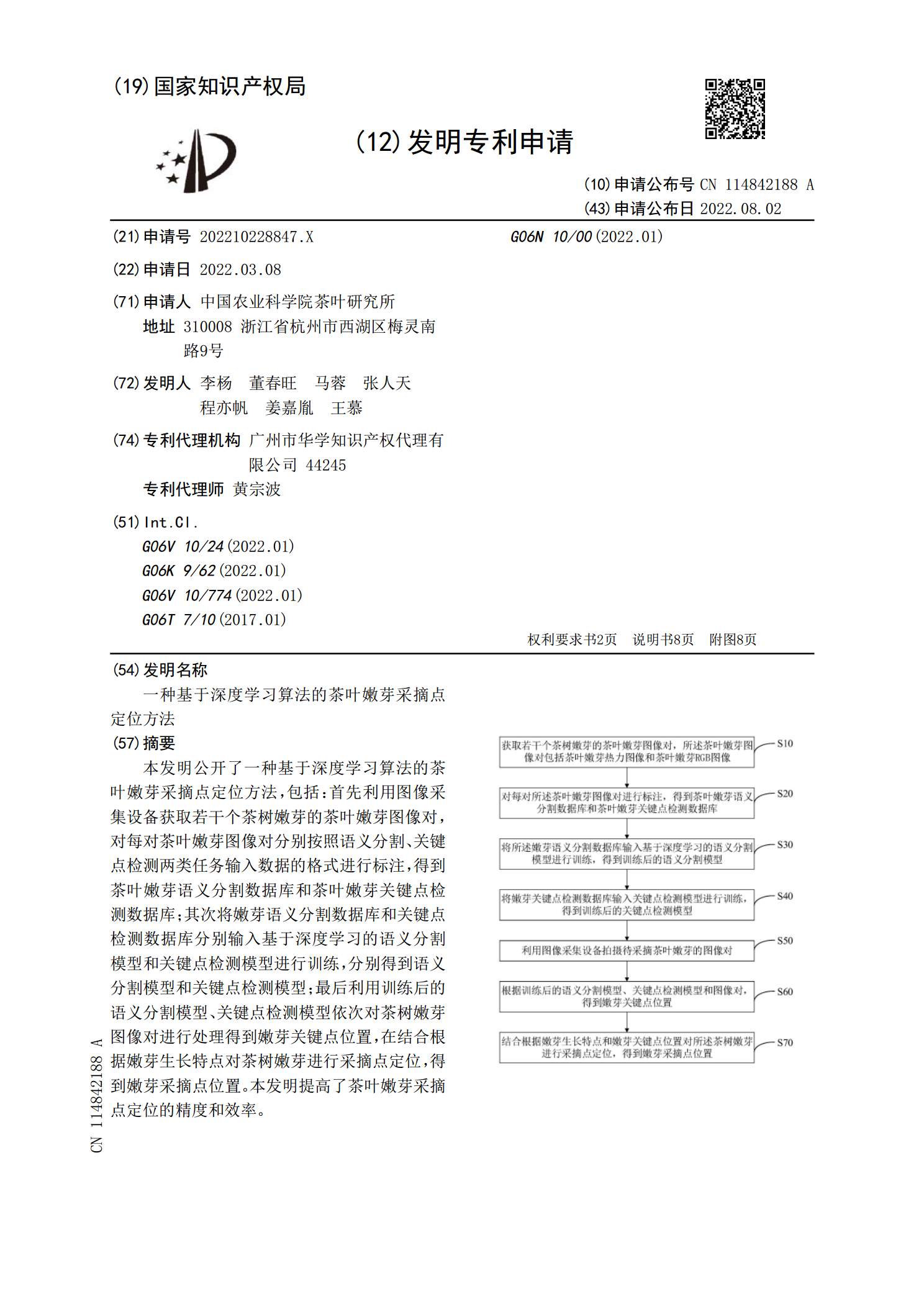
本发明公开了一种基于深度学习算法的茶叶嫩芽采摘点定位方法,包括:首先利用图像采集设备获取若干个茶树嫩芽的茶叶嫩芽图像对,对每对茶叶嫩芽图像对分别按照语义分割、关键点检测两类任务输入数据的格式进行标注,得到茶叶嫩芽语义分割数据库和茶叶嫩芽关键点检测数据库;其次将嫩芽语义分割数据库和关键点检测数据库分别输入基于深度学习的语义分割模型和关键点检测模型进行训练,分别得到语义分割模型和关键点检测模型;最后利用训练后的语义分割模型、关键点检测模型依次对茶树嫩芽图像对进行处理得到嫩芽关键点位置,在结合根据嫩芽生长特点对
改进YOLOv5目标检测模型构建方法及用于茶嫩芽识别与采摘点定位方法.pdf
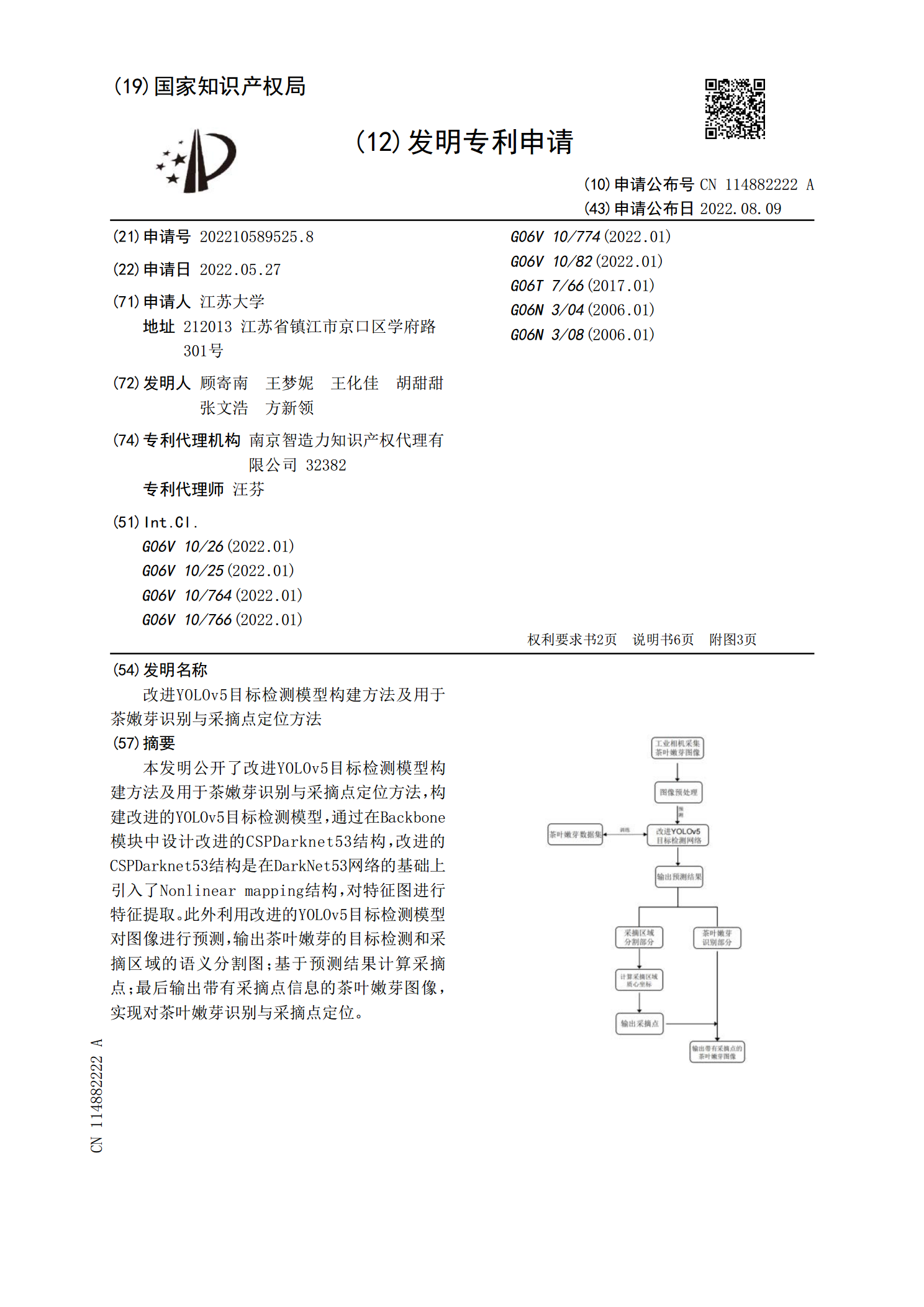
本发明公开了改进YOLOv5目标检测模型构建方法及用于茶嫩芽识别与采摘点定位方法,构建改进的YOLOv5目标检测模型,通过在Backbone模块中设计改进的CSPDarknet53结构,改进的CSPDarknet53结构是在DarkNet53网络的基础上引入了Nonlinearmapping结构,对特征图进行特征提取。此外利用改进的YOLOv5目标检测模型对图像进行预测,输出茶叶嫩芽的目标检测和采摘区域的语义分割图;基于预测结果计算采摘点;最后输出带有采摘点信息的茶叶嫩芽图像,实现对茶叶嫩芽识别与采摘点定
一种用于名优茶的智能连贯采摘系统.pdf
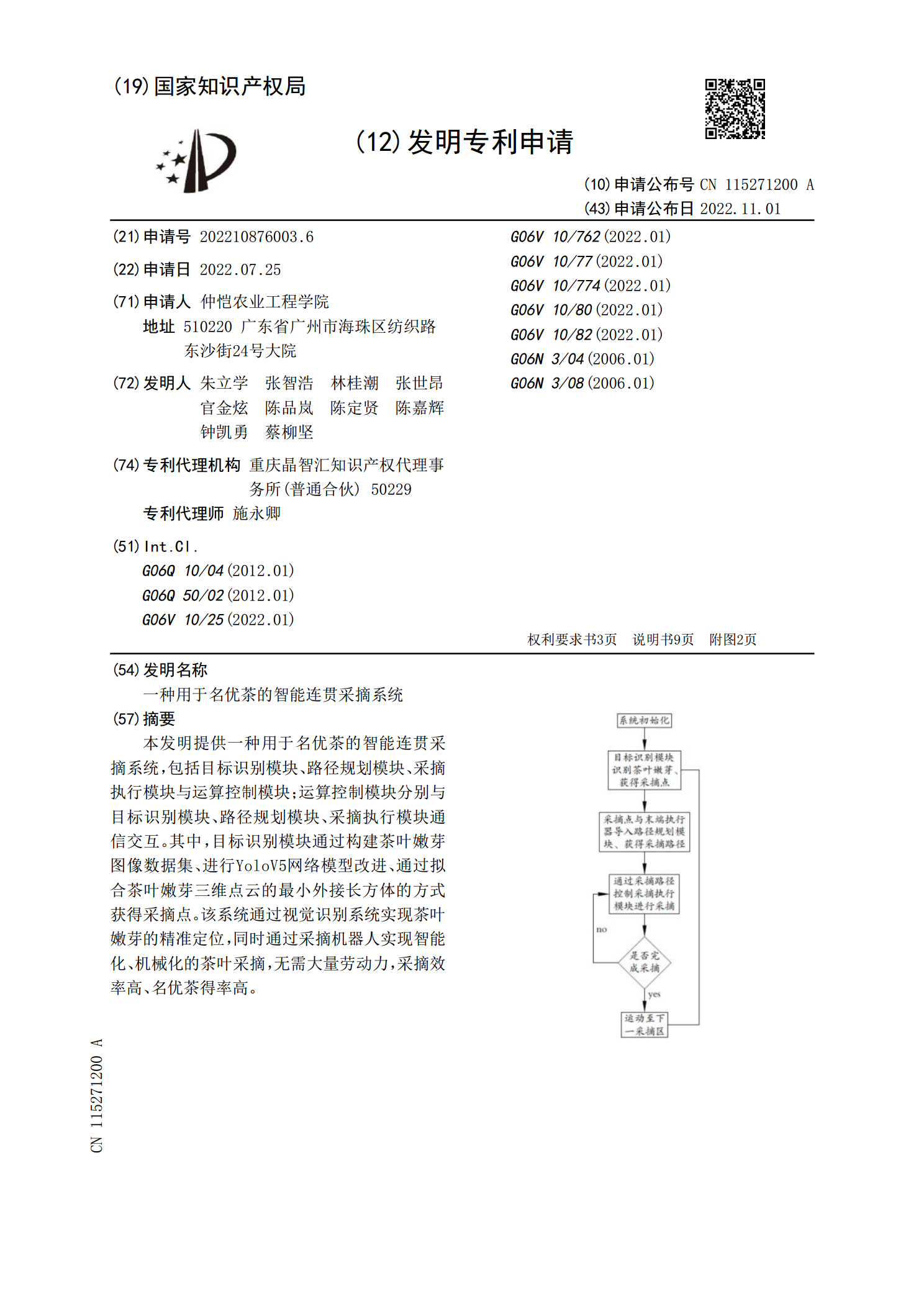
本发明提供一种用于名优茶的智能连贯采摘系统,包括目标识别模块、路径规划模块、采摘执行模块与运算控制模块;运算控制模块分别与目标识别模块、路径规划模块、采摘执行模块通信交互。其中,目标识别模块通过构建茶叶嫩芽图像数据集、进行YoloV5网络模型改进、通过拟合茶叶嫩芽三维点云的最小外接长方体的方式获得采摘点。该系统通过视觉识别系统实现茶叶嫩芽的精准定位,同时通过采摘机器人实现智能化、机械化的茶叶采摘,无需大量劳动力,采摘效率高、名优茶得率高。