
改进YOLOv5目标检测模型构建方法及用于茶嫩芽识别与采摘点定位方法.pdf

一条****杉淑

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
改进YOLOv5目标检测模型构建方法及用于茶嫩芽识别与采摘点定位方法.pdf
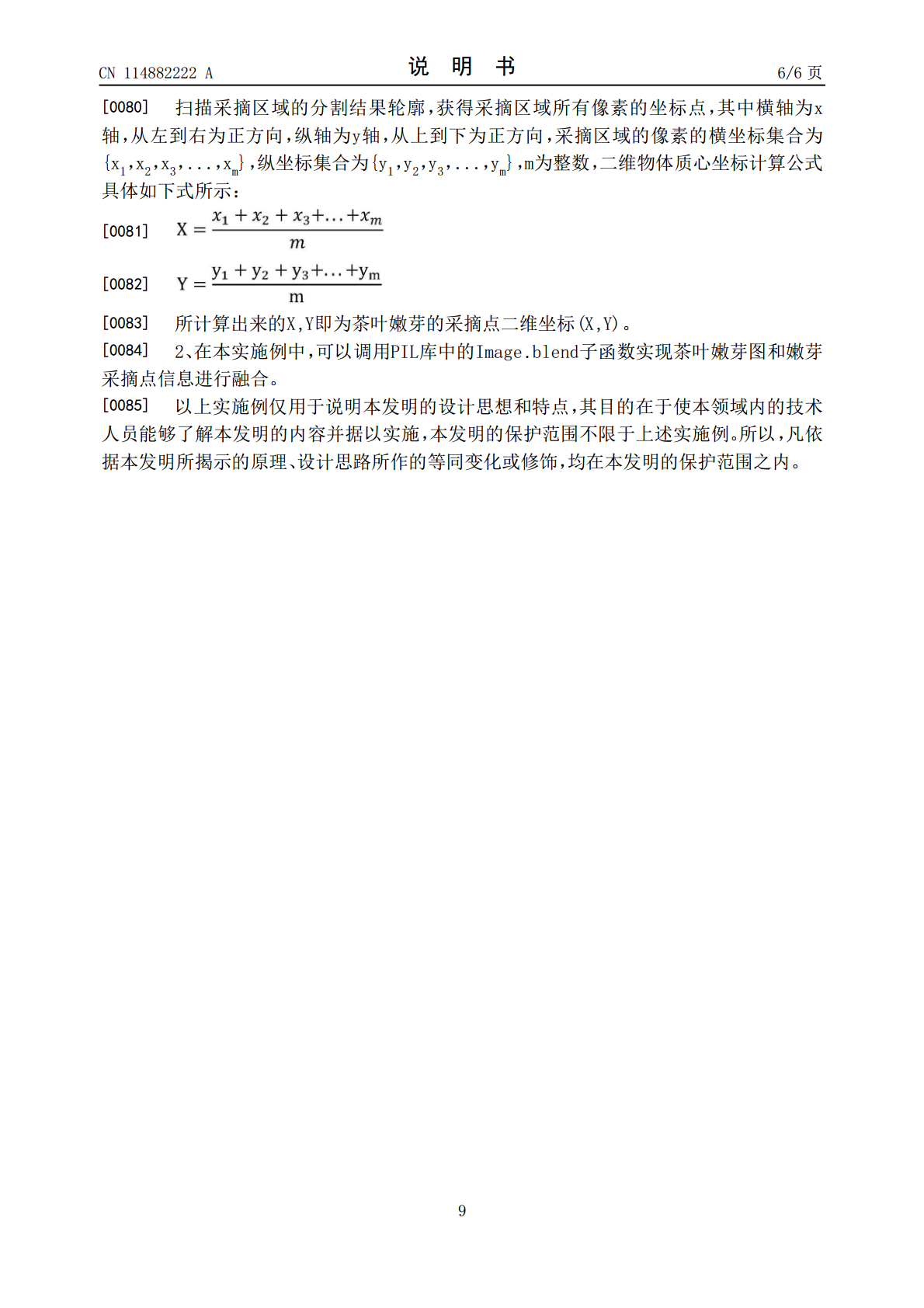
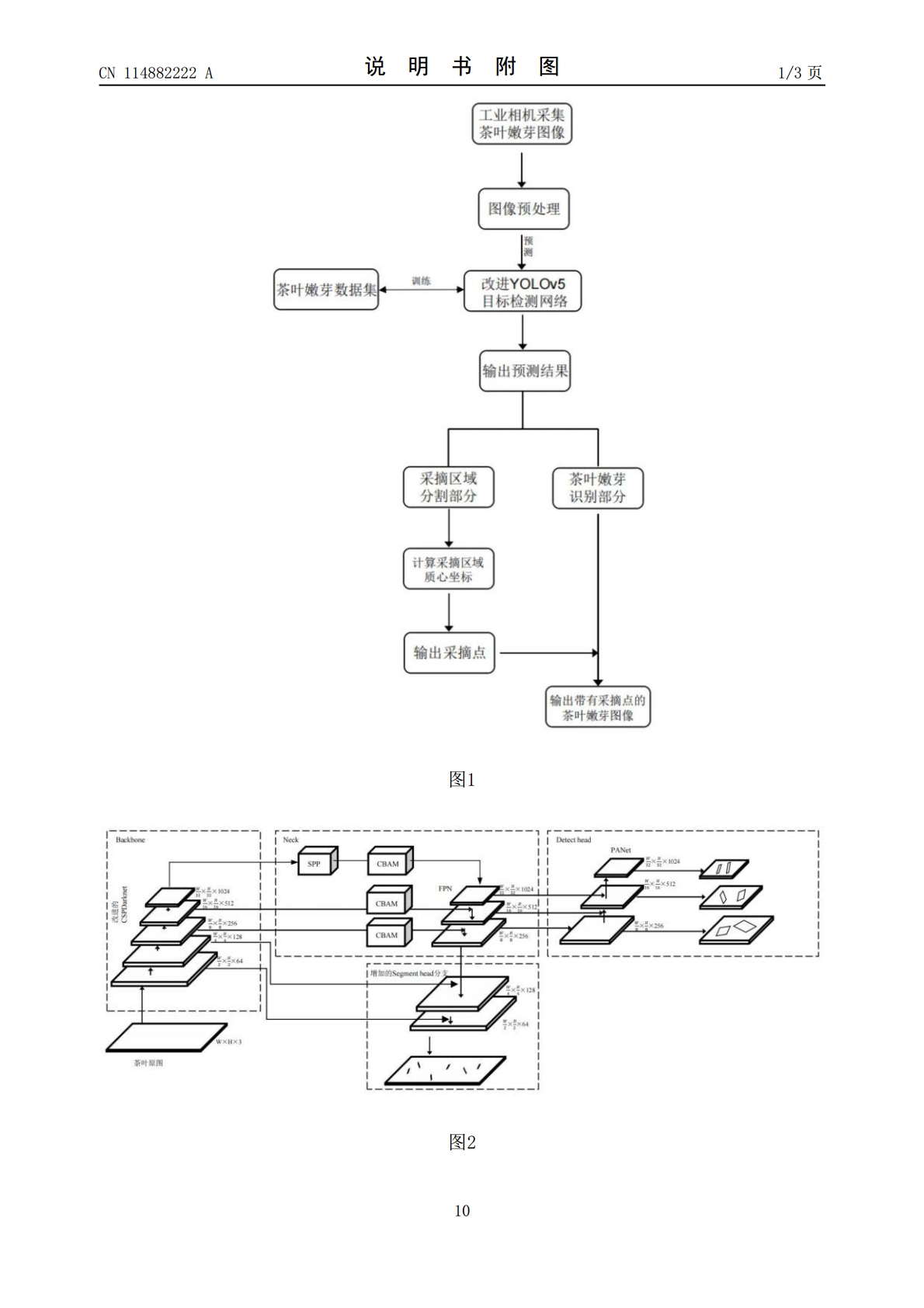
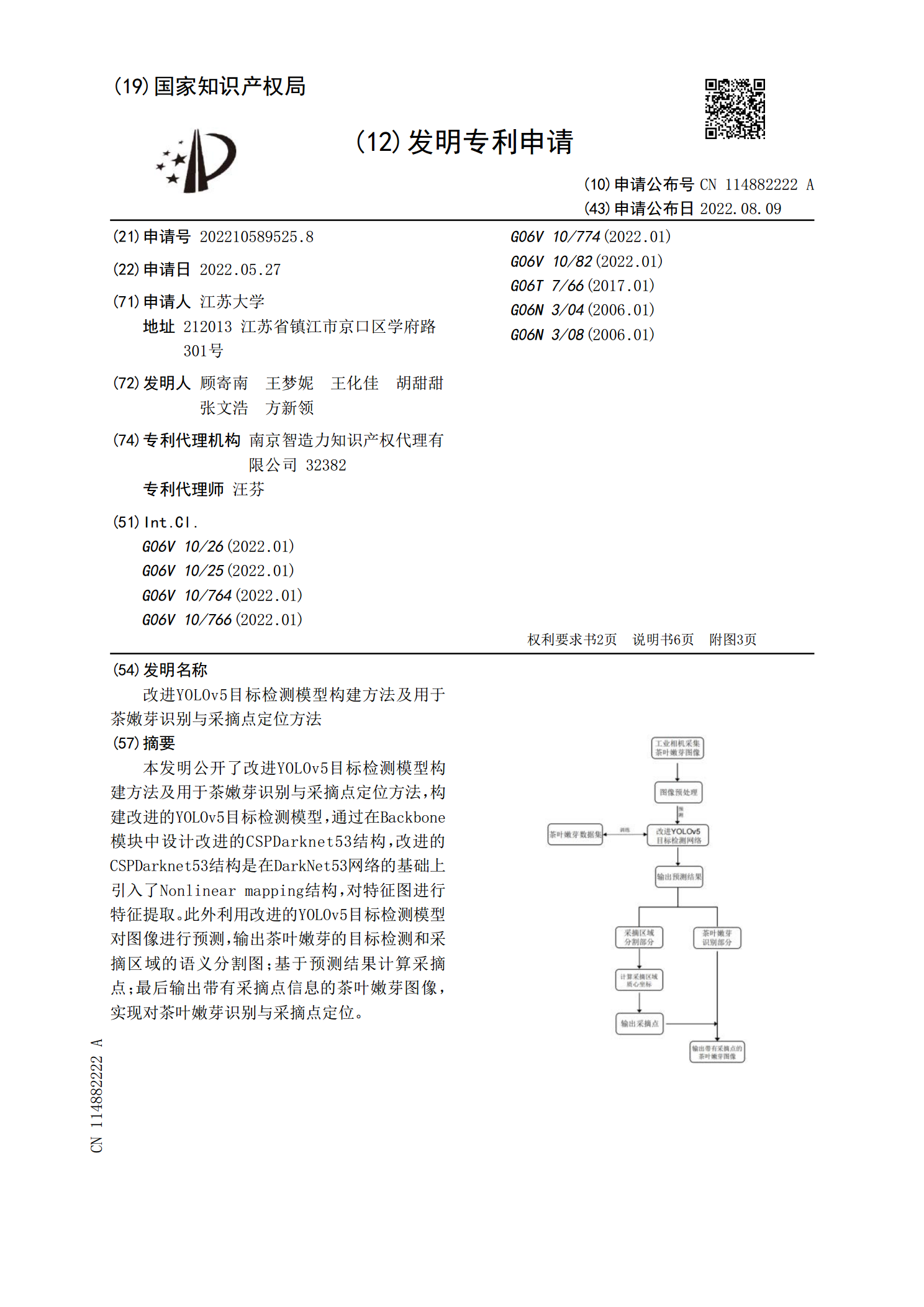
本发明公开了改进YOLOv5目标检测模型构建方法及用于茶嫩芽识别与采摘点定位方法,构建改进的YOLOv5目标检测模型,通过在Backbone模块中设计改进的CSPDarknet53结构,改进的CSPDarknet53结构是在DarkNet53网络的基础上引入了Nonlinearmapping结构,对特征图进行特征提取。此外利用改进的YOLOv5目标检测模型对图像进行预测,输出茶叶嫩芽的目标检测和采摘区域的语义分割图;基于预测结果计算采摘点;最后输出带有采摘点信息的茶叶嫩芽图像,实现对茶叶嫩芽识别与采摘点定
一种用于名优茶嫩芽采摘过程的定位方法.pdf
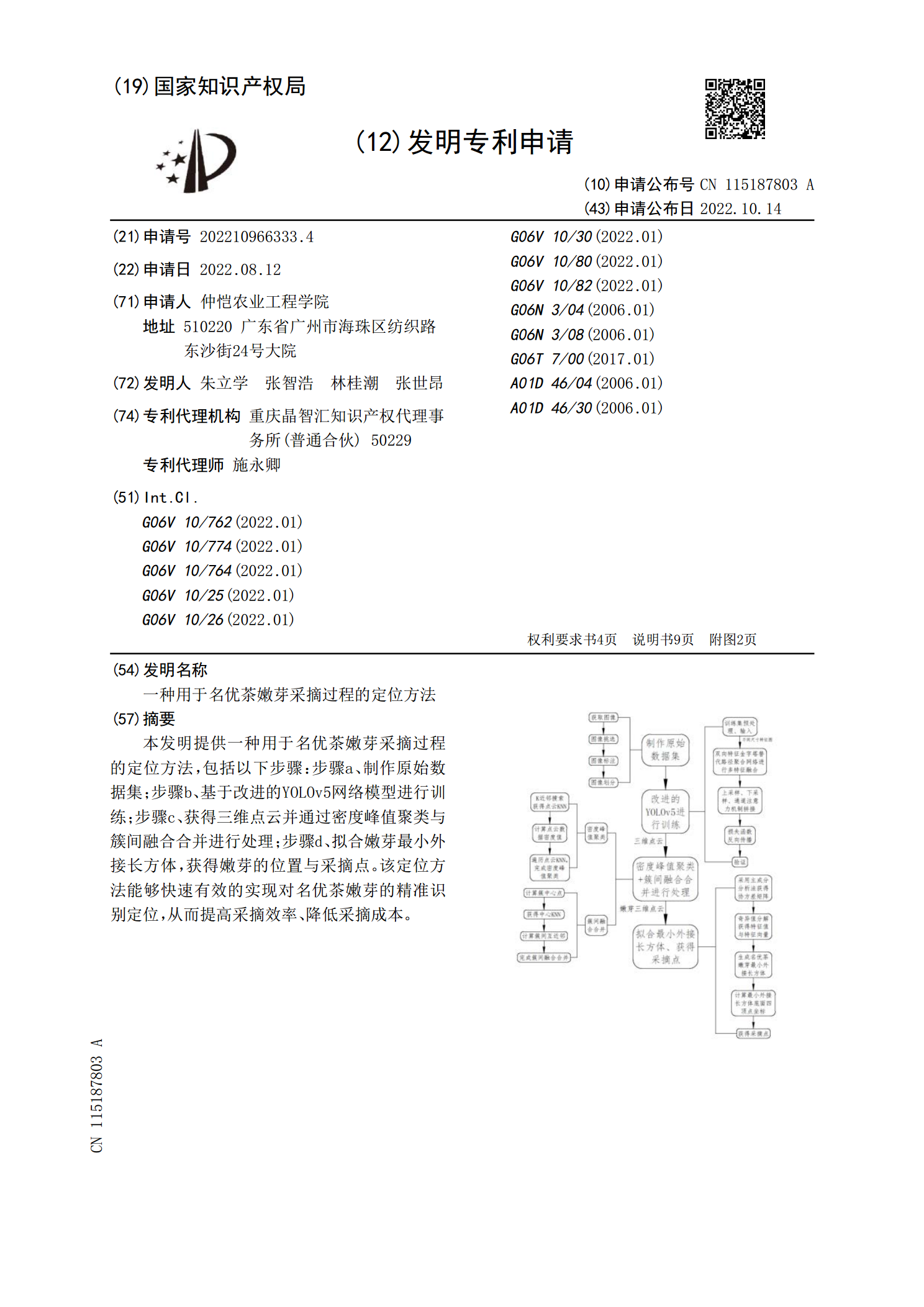
本发明提供一种用于名优茶嫩芽采摘过程的定位方法,包括以下步骤:步骤a、制作原始数据集;步骤b、基于改进的YOLOv5网络模型进行训练;步骤c、获得三维点云并通过密度峰值聚类与簇间融合合并进行处理;步骤d、拟合嫩芽最小外接长方体,获得嫩芽的位置与采摘点。该定位方法能够快速有效的实现对名优茶嫩芽的精准识别定位,从而提高采摘效率、降低采摘成本。
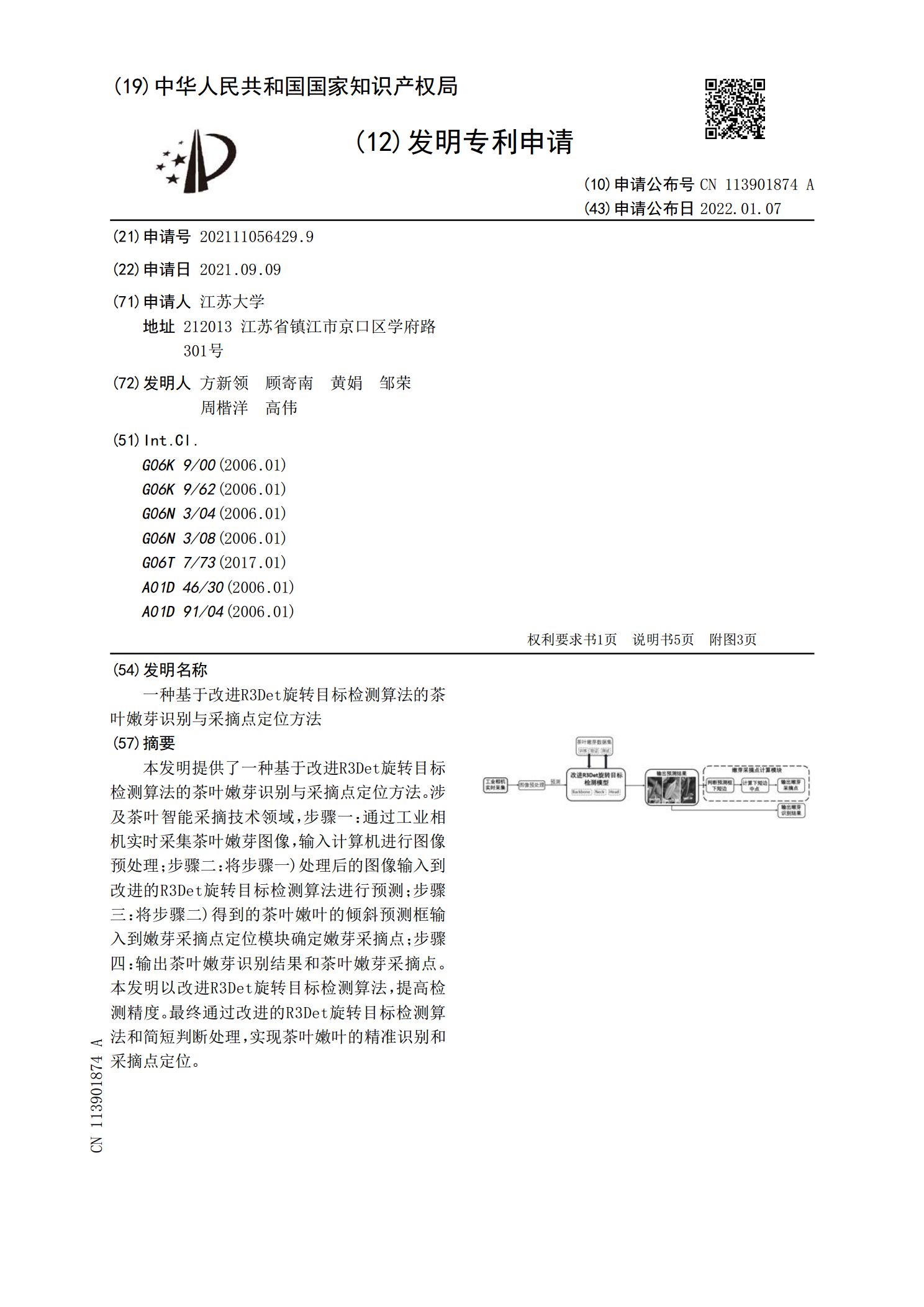
一种基于改进R3Det旋转目标检测算法的茶叶嫩芽识别与采摘点定位方法.pdf
本发明提供了一种基于改进R3Det旋转目标检测算法的茶叶嫩芽识别与采摘点定位方法。涉及茶叶智能采摘技术领域,步骤一:通过工业相机实时采集茶叶嫩芽图像,输入计算机进行图像预处理;步骤二:将步骤一)处理后的图像输入到改进的R3Det旋转目标检测算法进行预测;步骤三:将步骤二)得到的茶叶嫩叶的倾斜预测框输入到嫩芽采摘点定位模块确定嫩芽采摘点;步骤四:输出茶叶嫩芽识别结果和茶叶嫩芽采摘点。本发明以改进R3Det旋转目标检测算法,提高检测精度。最终通过改进的R3Det旋转目标检测算法和简短判断处理,实现茶叶嫩叶的精
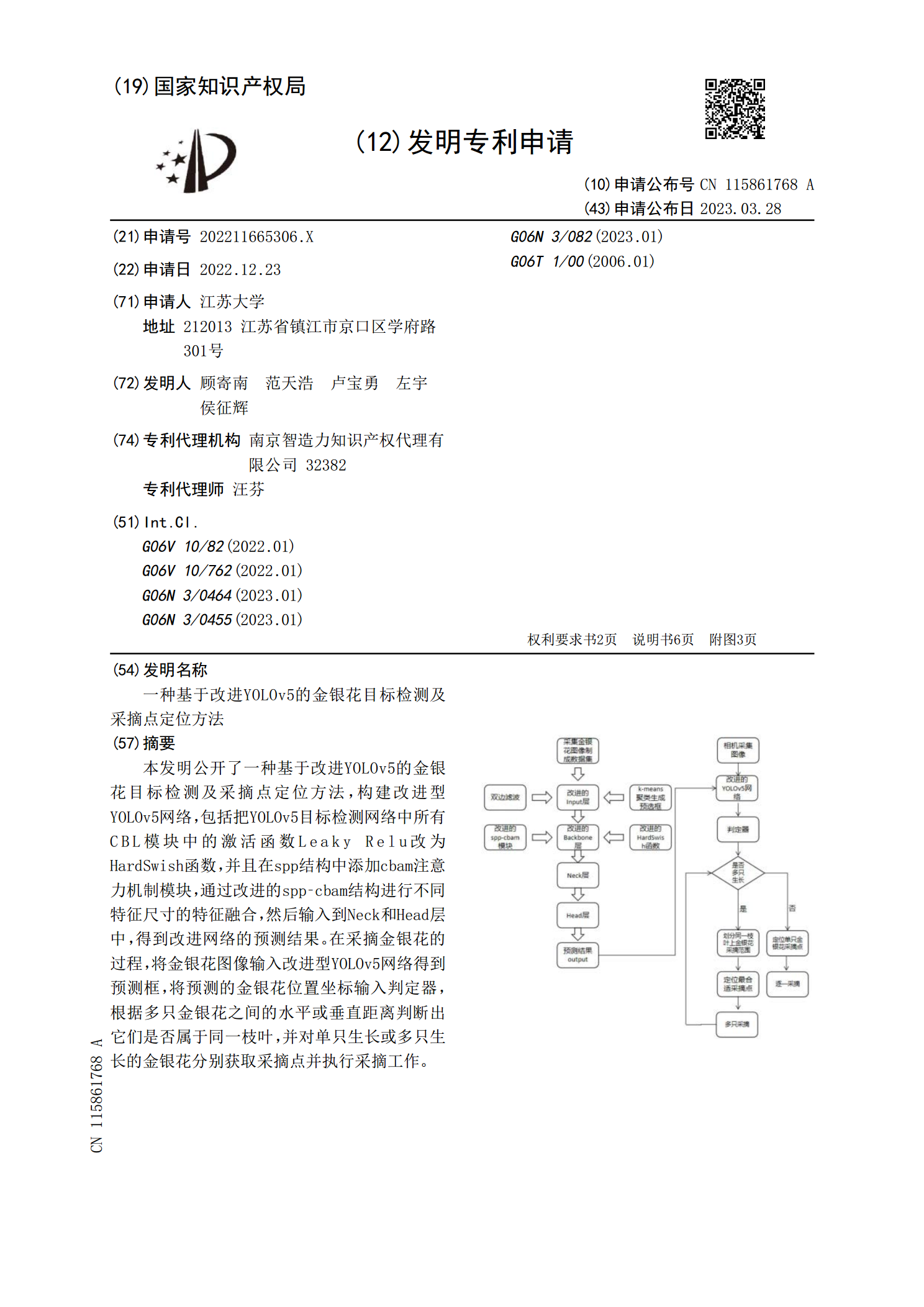
一种基于改进YOLOv5的金银花目标检测及采摘点定位方法.pdf
本发明公开了一种基于改进YOLOv5的金银花目标检测及采摘点定位方法,构建改进型YOLOv5网络,包括把YOLOv5目标检测网络中所有CBL模块中的激活函数LeakyRelu改为HardSwish函数,并且在spp结构中添加cbam注意力机制模块,通过改进的spp?cbam结构进行不同特征尺寸的特征融合,然后输入到Neck和Head层中,得到改进网络的预测结果。在采摘金银花的过程,将金银花图像输入改进型YOLOv5网络得到预测框,将预测的金银花位置坐标输入判定器,根据多只金银花之间的水平或垂直距离判断出它
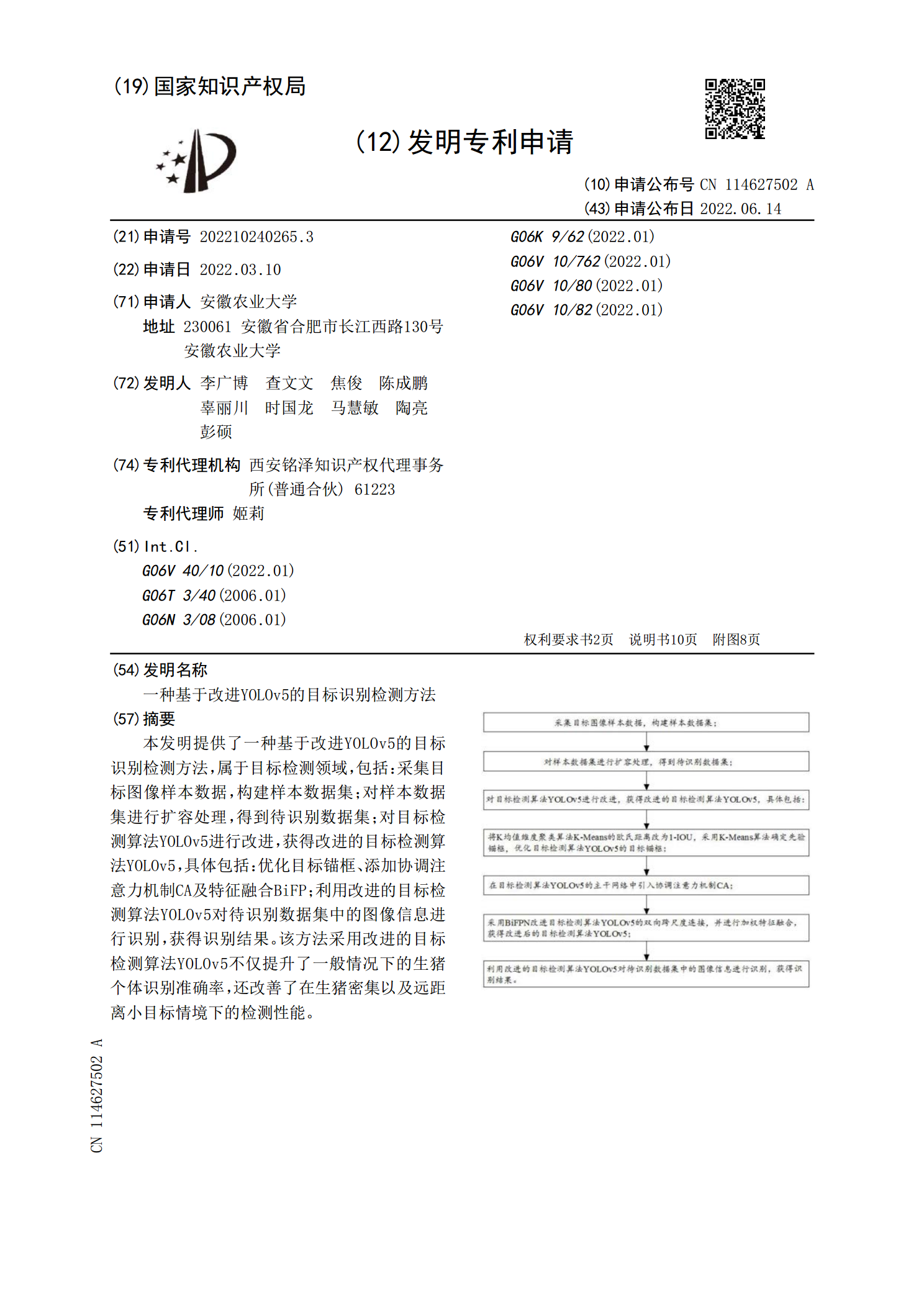
一种基于改进YOLOv5的目标识别检测方法.pdf
本发明提供了一种基于改进YOLOv5的目标识别检测方法,属于目标检测领域,包括:采集目标图像样本数据,构建样本数据集;对样本数据集进行扩容处理,得到待识别数据集;对目标检测算法YOLOv5进行改进,获得改进的目标检测算法YOLOv5,具体包括:优化目标锚框、添加协调注意力机制CA及特征融合BiFP;利用改进的目标检测算法YOLOv5对待识别数据集中的图像信息进行识别,获得识别结果。该方法采用改进的目标检测算法YOLOv5不仅提升了一般情况下的生猪个体识别准确率,还改善了在生猪密集以及远距离小目标情境下的检