
换行路径规划方法、作业控制方法及相关装置.pdf

长春****主a


1/10
2/10

3/10

4/10
5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

换行路径规划方法、作业控制方法及相关装置.pdf
本申请实施例涉及自动驾驶领域,提供一种换行路径规划方法、作业控制方法及相关装置,采用倒车换行的方式,沿换行路径从当前作业路径倒车至目标作业路径,从而可以在不需要调头的情况下,实现作业路径之间的换行,如此一来,直线作业部分的长度将大大增加,提高了作业设备的作业效率。在此基础上,针对有拖挂农具的情况,沿本申请实施例提供的换行路径,从当前作业路径倒车至目标作业路径后,作业设备在目标作业路径上的作业方向和在当前作业路径上的作业方向相同,不需要再额外校准农具偏移,大大提高了大型拖挂农机的作业效率。
路径生成方法、作业控制方法及相关装置.pdf
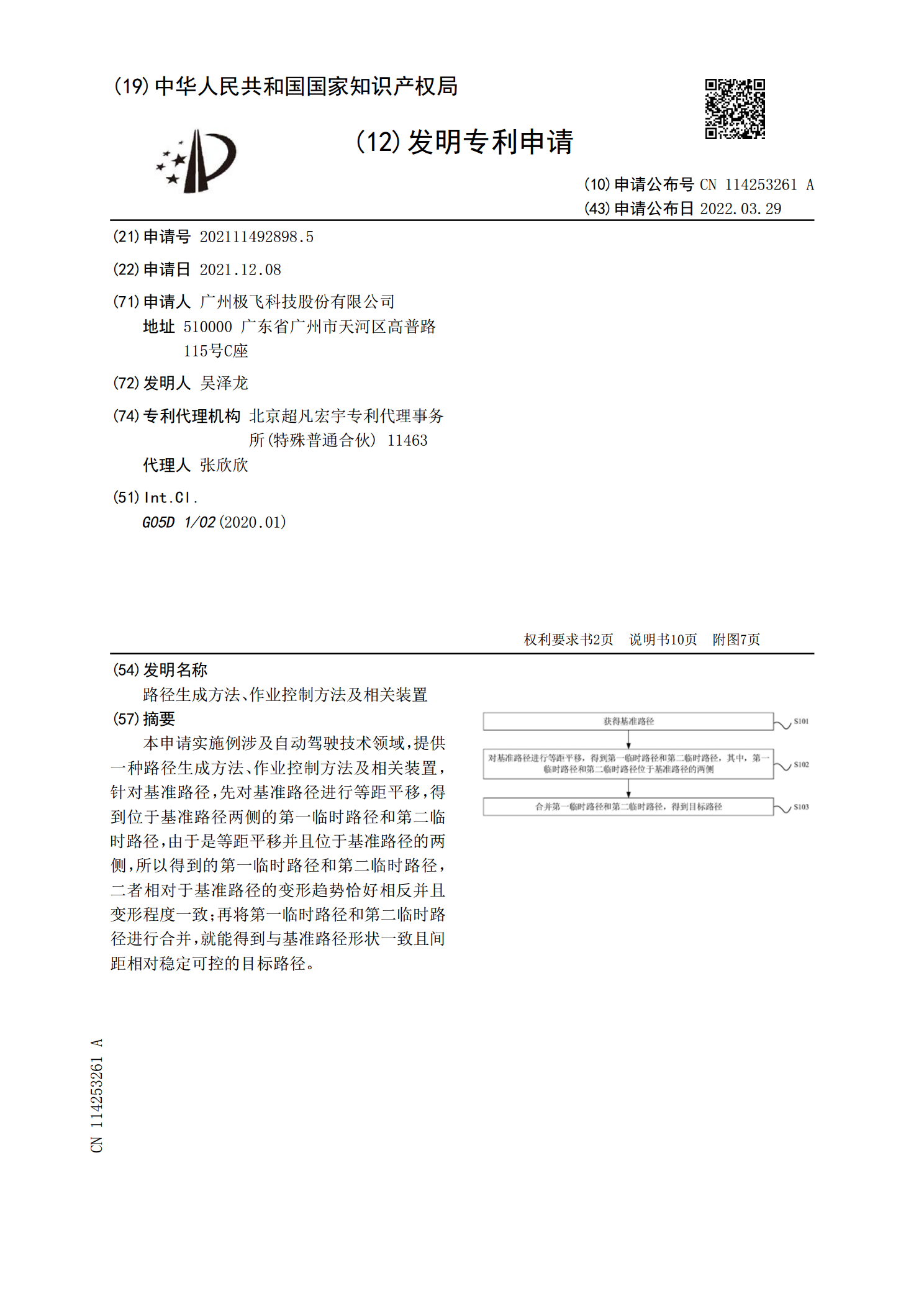
本申请实施例涉及自动驾驶技术领域,提供一种路径生成方法、作业控制方法及相关装置,针对基准路径,先对基准路径进行等距平移,得到位于基准路径两侧的第一临时路径和第二临时路径,由于是等距平移并且位于基准路径的两侧,所以得到的第一临时路径和第二临时路径,二者相对于基准路径的变形趋势恰好相反并且变形程度一致;再将第一临时路径和第二临时路径进行合并,就能得到与基准路径形状一致且间距相对稳定可控的目标路径。
航线规划方法、作业控制方法及相关装置.pdf
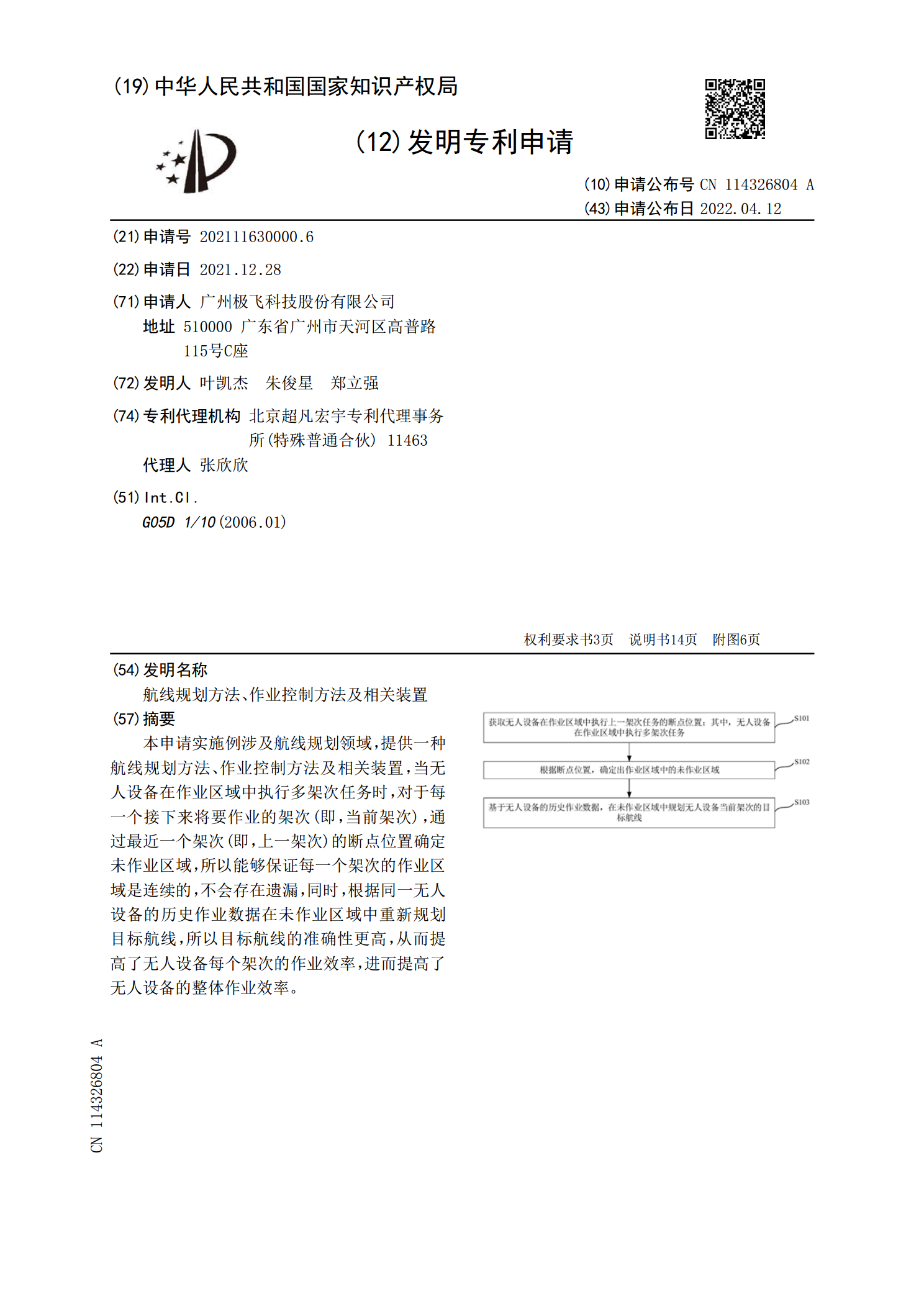
本申请实施例涉及航线规划领域,提供一种航线规划方法、作业控制方法及相关装置,当无人设备在作业区域中执行多架次任务时,对于每一个接下来将要作业的架次(即,当前架次),通过最近一个架次(即,上一架次)的断点位置确定未作业区域,所以能够保证每一个架次的作业区域是连续的,不会存在遗漏,同时,根据同一无人设备的历史作业数据在未作业区域中重新规划目标航线,所以目标航线的准确性更高,从而提高了无人设备每个架次的作业效率,进而提高了无人设备的整体作业效率。

补给点规划方法、作业控制方法及相关装置.pdf
本申请实施例涉及农机领域,提供一种补给点规划方法、作业控制方法及相关装置,先通过作业设备的作业参数,确定出作业设备在待作业地块中的单次可作业路程;再根据作业设备在待作业地块的作业路线和单次可作业路程,在待作业地块中规划作业设备的补给点,从而取代人工估算实现了补给点的自动规划。同时,由于在补给点规划中考虑了作业设备在待作业地块的作业路线和单次可作业路程,所以规划的补给点会离作业设备消耗完作业物资的位置比较近,便于作业设备快速补充作业物资,进而提高了作业设备的作业效率。

飞行器作业路径规划方法以及控制装置和控制设备.pdf
本发明涉及一种飞行器作业路径规划方法以及控制装置和控制设备,其中包括以下步骤:获取停靠点,作业点以及安全点,所述安全点周围的安全距离范围内没有障碍物;规划所述停靠点与安全点之间的第一路径、所述安全点与作业点之间的第二路径,使得所述停靠点和所述作业点之间的路径按照平滑过渡的方式经过所述安全点。本发明令无人机飞行器飞行的路径通过安全点过渡,实现安全进入或离开作业地块;并且飞行器按照第三路径过渡的路径飞行,无需在安全点停留,以提高飞行器的飞行速度,提高作业时效;由于飞行器能够避免在安全点停顿,从而避免对作业目标