
一种自动喷洒式农用无人机.pdf

景福****90

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种自动喷洒式农用无人机.pdf
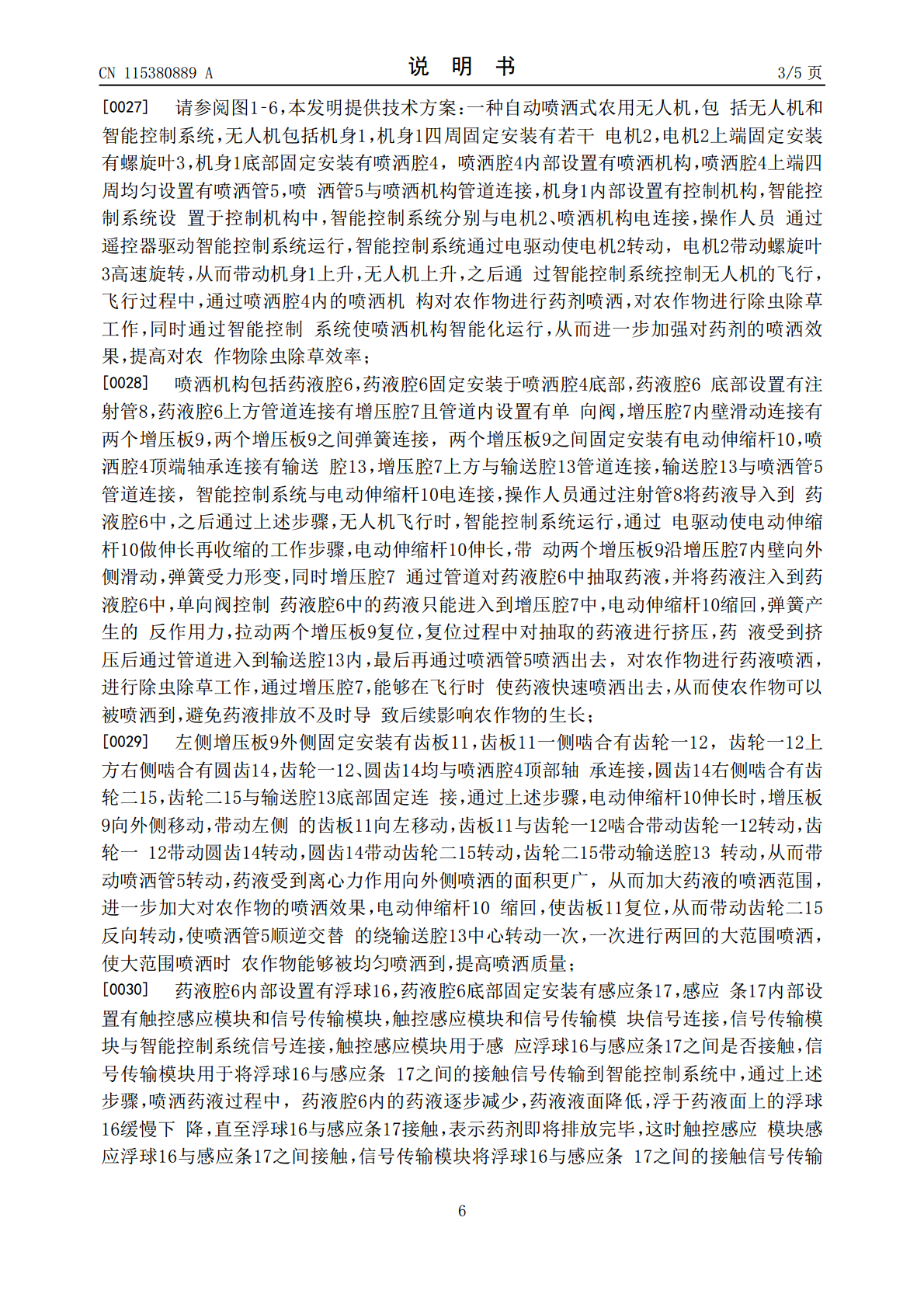
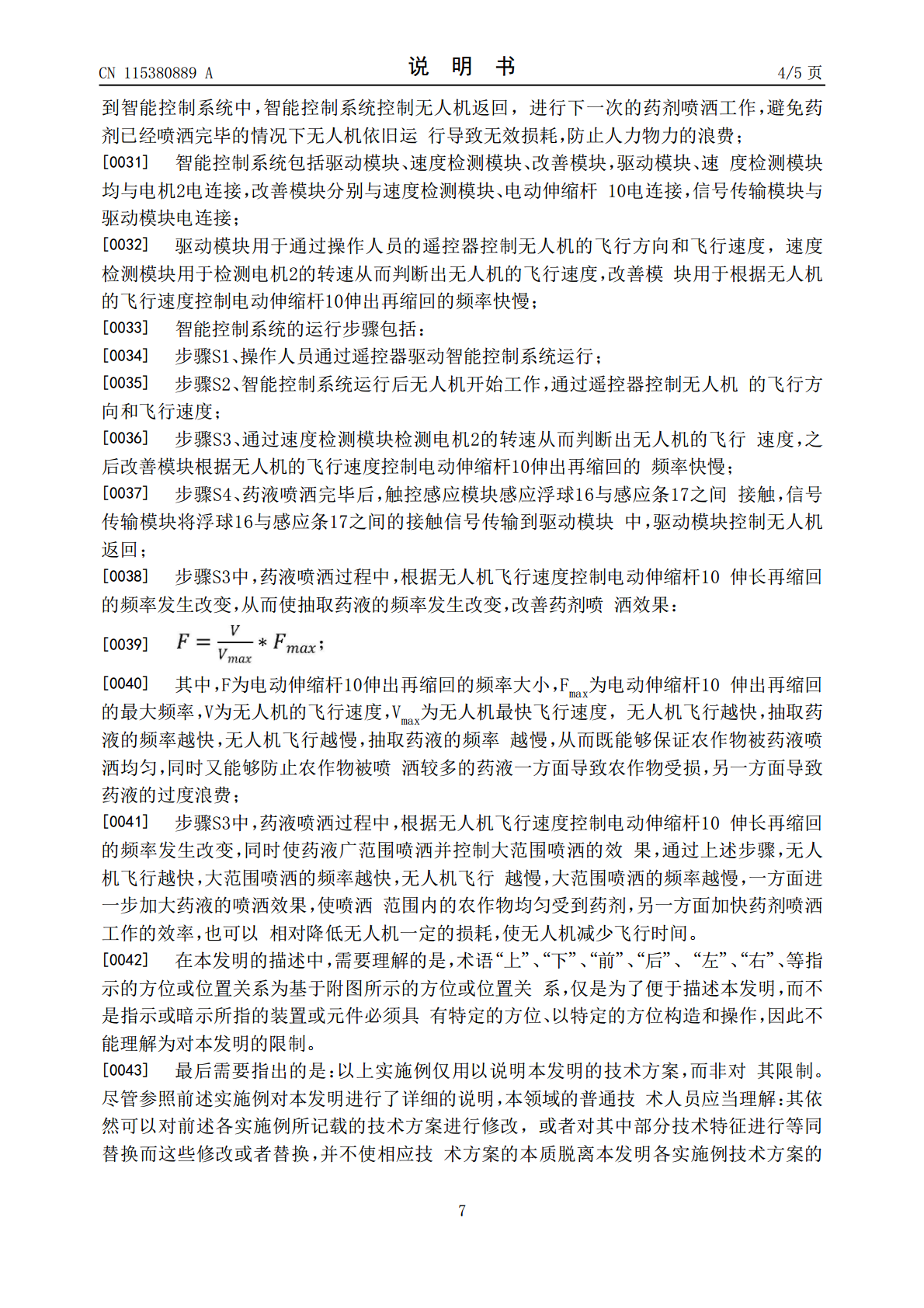
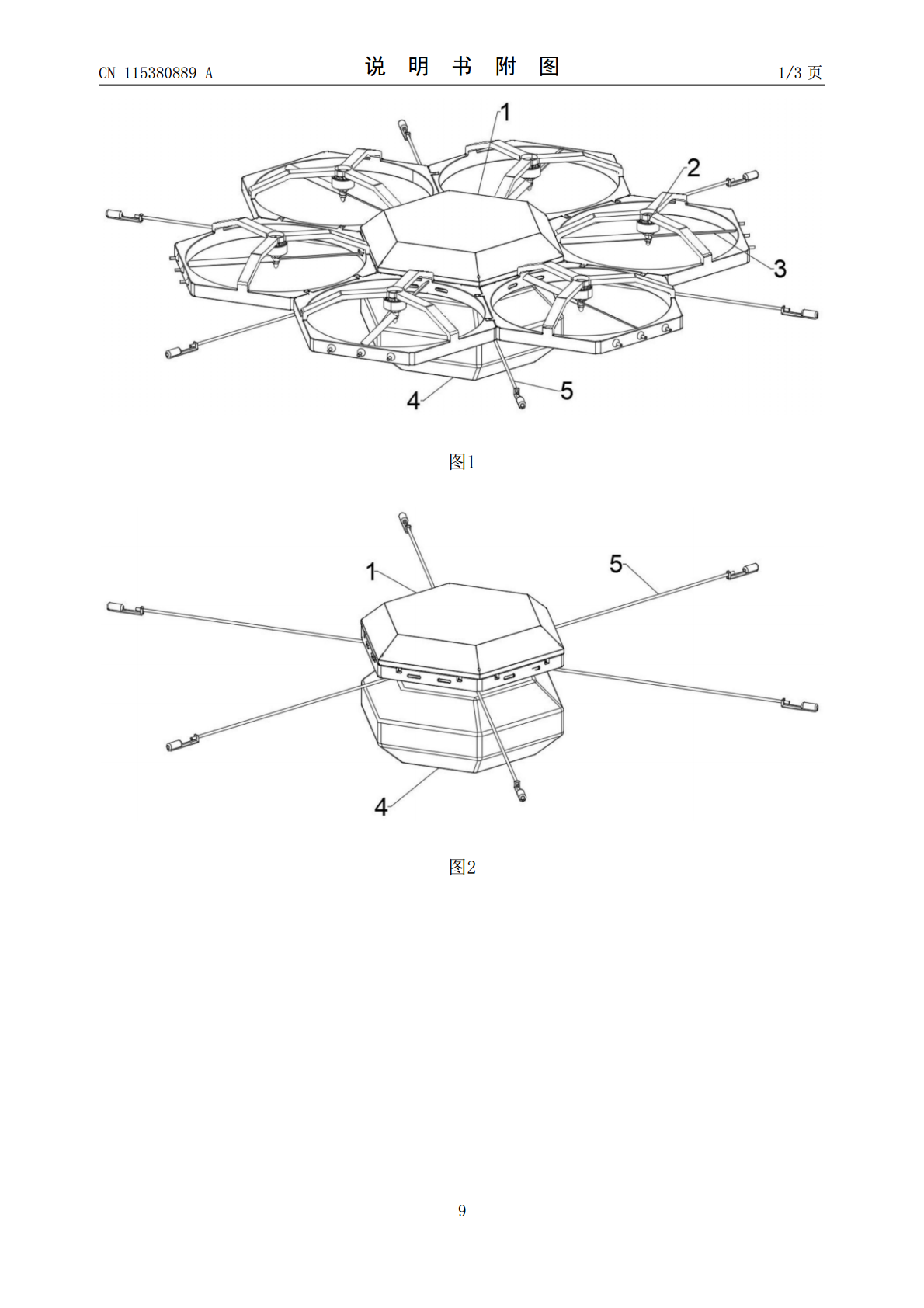
本发明公开了一种自动喷洒式农用无人机,其中包括无人机和智能控制系统,所述无人机包括机身,所述机身四周固定安装有若干电机,所述电机上端固定安装有螺旋叶,所述机身底部固定安装有喷洒腔,所述喷洒腔内部设置有喷洒机构,所述喷洒腔上端四周均匀设置有喷洒管,所述喷洒管与喷洒机构管道连接,所述机身内部设置有控制机构,所述智能控制系统设置于控制机构中,所述智能控制系统分别与电机、喷洒机构电连接,所述喷洒机构包括药液腔,所述药液腔固定安装于喷洒腔底部,所述药液腔底部设置有注射管,所述药液腔上方管道连接有增压腔且管道内设置有
一种农用喷洒无人机.pdf
本发明涉及一种无人机,更具体地说是一种农用喷洒无人机,装置无人驾驶,智能化水平高,装置带有摄像头,可以让使用者看清需要喷洒的农作物的情况,并且装置的运行方向方便控制。水箱设置在无人机主体的内部,水管管口安装在水箱上,盖子安装在水管管口上。固定筋板的一端与尾翼相连接,固定筋板的另一端与方向控制桨相连接。摄像头安装在无人机主体上,支架安装在无人机主体上。网罩设置在水箱上,水管Ⅰ的一端与支架相连接,水管Ⅰ的另一端与水泵相连接,水泵安装在固定板上,固定板安装在无人机主体上。水管Ⅱ的一端与水泵相连接,水管Ⅱ的另一端
一种农用喷洒无人机.pdf
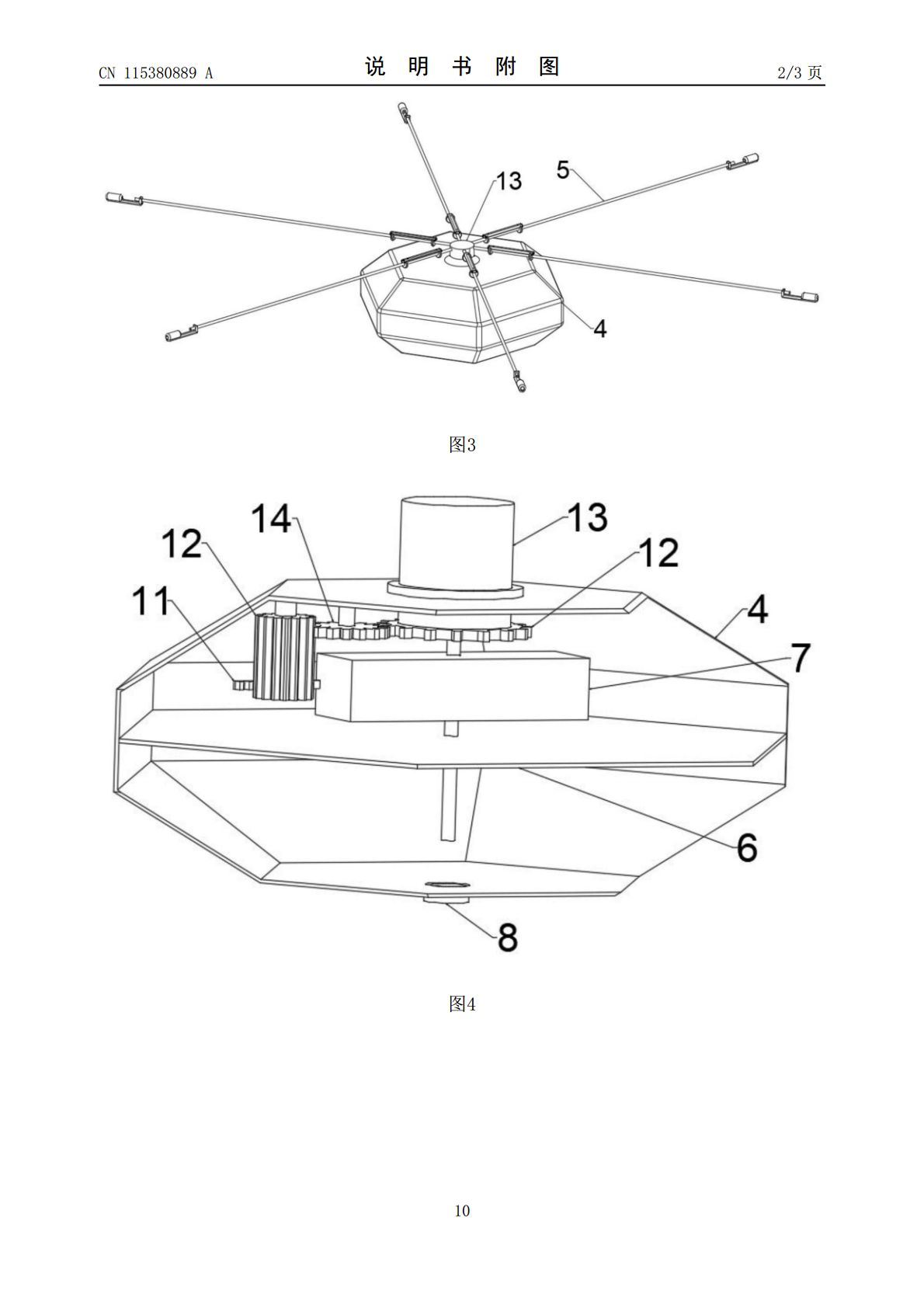
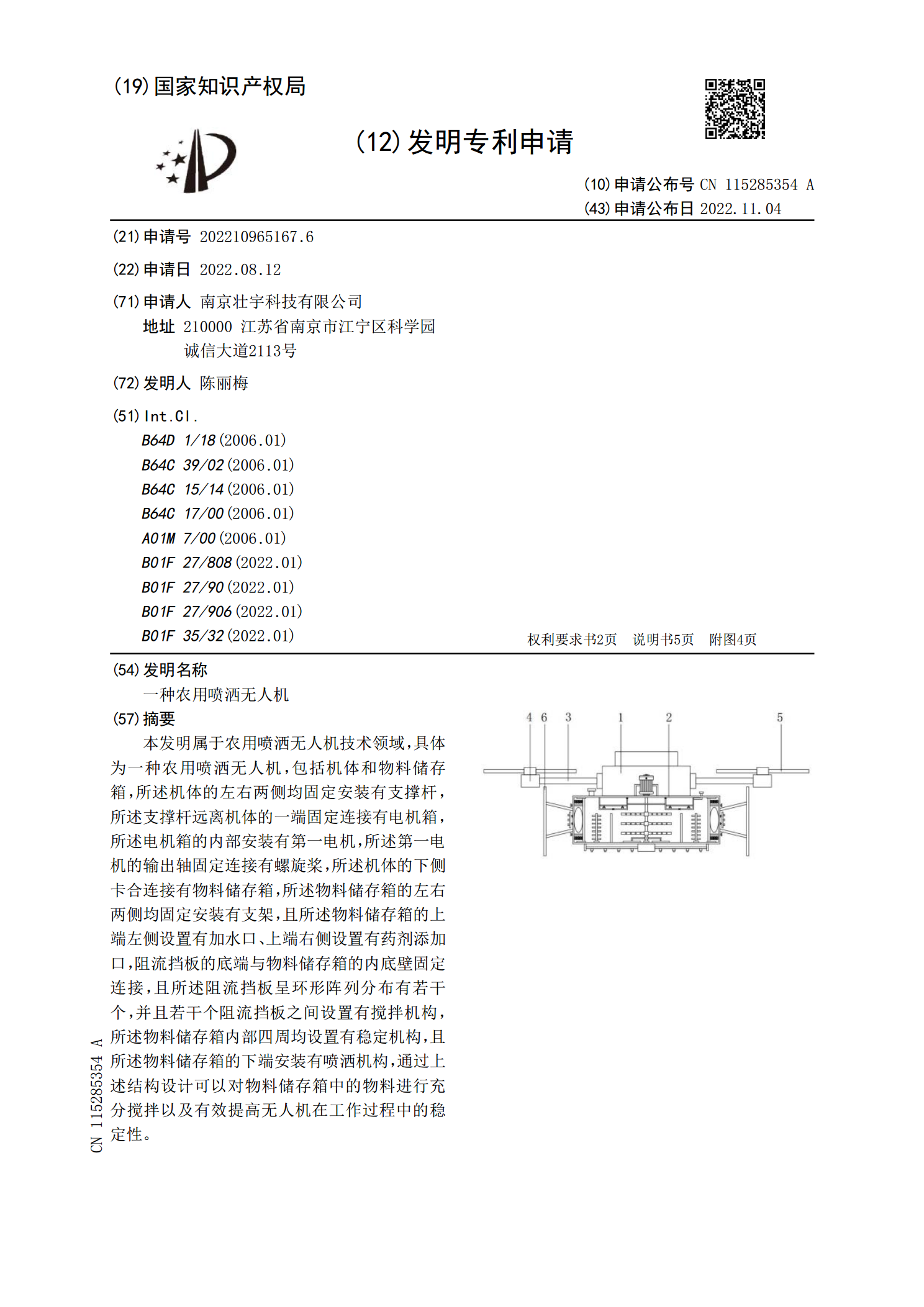
本发明属于农用喷洒无人机技术领域,具体为一种农用喷洒无人机,包括机体和物料储存箱,所述机体的左右两侧均固定安装有支撑杆,所述支撑杆远离机体的一端固定连接有电机箱,所述电机箱的内部安装有第一电机,所述第一电机的输出轴固定连接有螺旋桨,所述机体的下侧卡合连接有物料储存箱,所述物料储存箱的左右两侧均固定安装有支架,且所述物料储存箱的上端左侧设置有加水口、上端右侧设置有药剂添加口,阻流挡板的底端与物料储存箱的内底壁固定连接,且所述阻流挡板呈环形阵列分布有若干个,并且若干个阻流挡板之间设置有搅拌机构,所述物料储存箱
一种自动喷洒式农业无人机.pdf
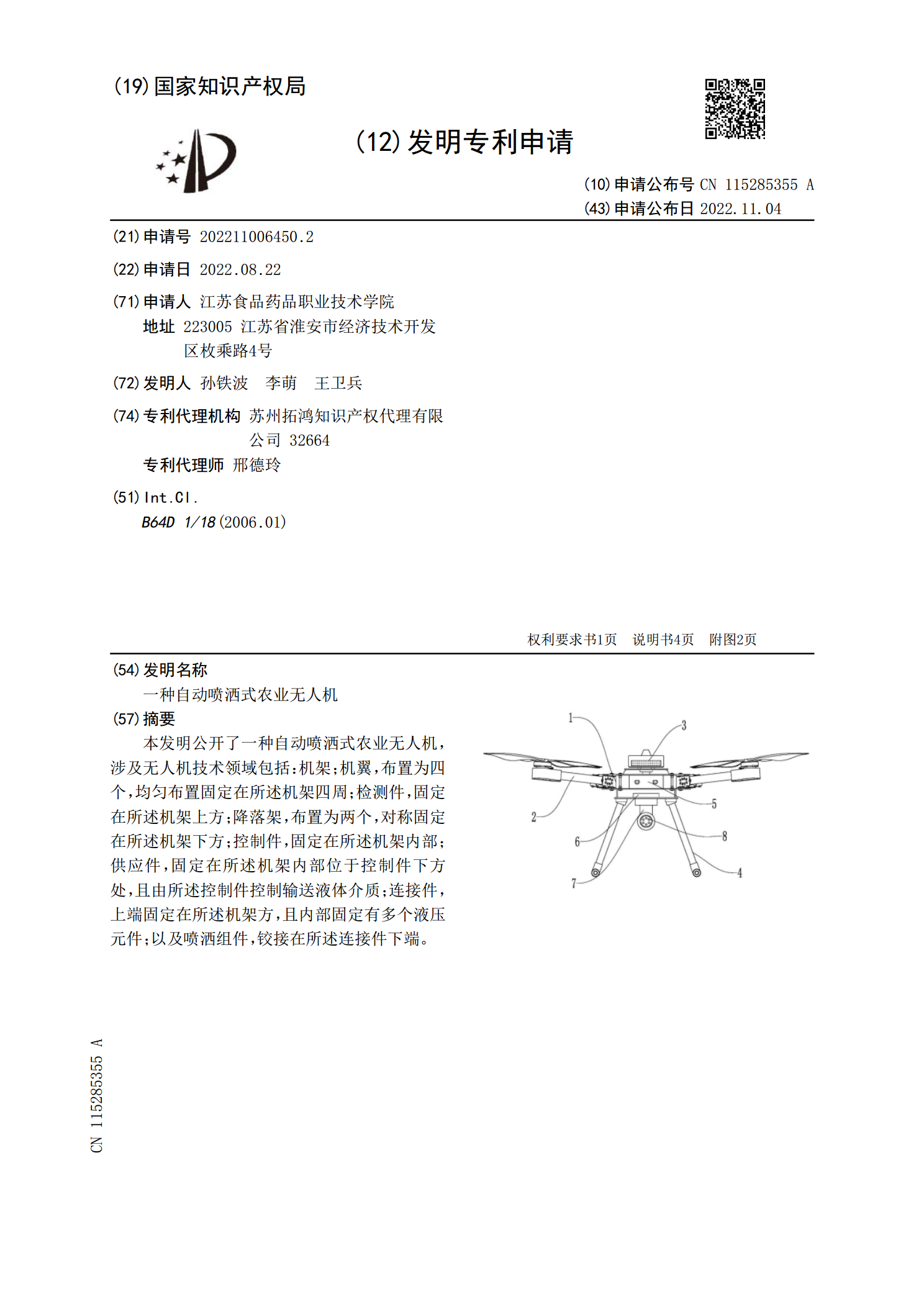
本发明公开了一种自动喷洒式农业无人机,涉及无人机技术领域包括:机架;机翼,布置为四个,均匀布置固定在所述机架四周;检测件,固定在所述机架上方;降落架,布置为两个,对称固定在所述机架下方;控制件,固定在所述机架内部;供应件,固定在所述机架内部位于控制件下方处,且由所述控制件控制输送液体介质;连接件,上端固定在所述机架方,且内部固定有多个液压元件;以及喷洒组件,铰接在所述连接件下端。
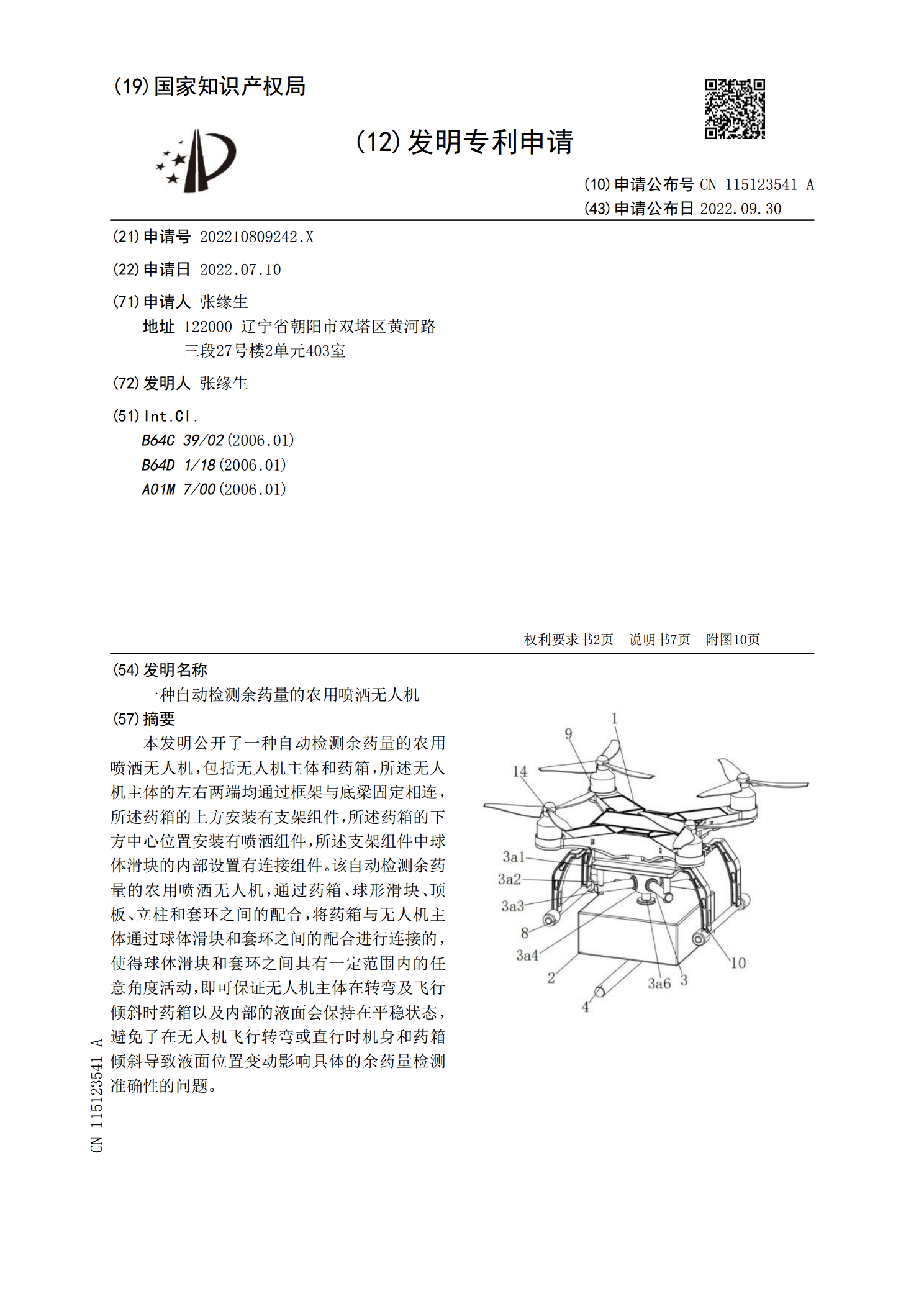
一种自动检测余药量的农用喷洒无人机.pdf
本发明公开了一种自动检测余药量的农用喷洒无人机,包括无人机主体和药箱,所述无人机主体的左右两端均通过框架与底梁固定相连,所述药箱的上方安装有支架组件,所述药箱的下方中心位置安装有喷洒组件,所述支架组件中球体滑块的内部设置有连接组件。该自动检测余药量的农用喷洒无人机,通过药箱、球形滑块、顶板、立柱和套环之间的配合,将药箱与无人机主体通过球体滑块和套环之间的配合进行连接的,使得球体滑块和套环之间具有一定范围内的任意角度活动,即可保证无人机主体在转弯及飞行倾斜时药箱以及内部的液面会保持在平稳状态,避免了在无人机