
一种智能躲避障碍物的机器人.pdf

猫巷****奕声

1/10

2/10
3/10

4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种智能躲避障碍物的机器人.pdf
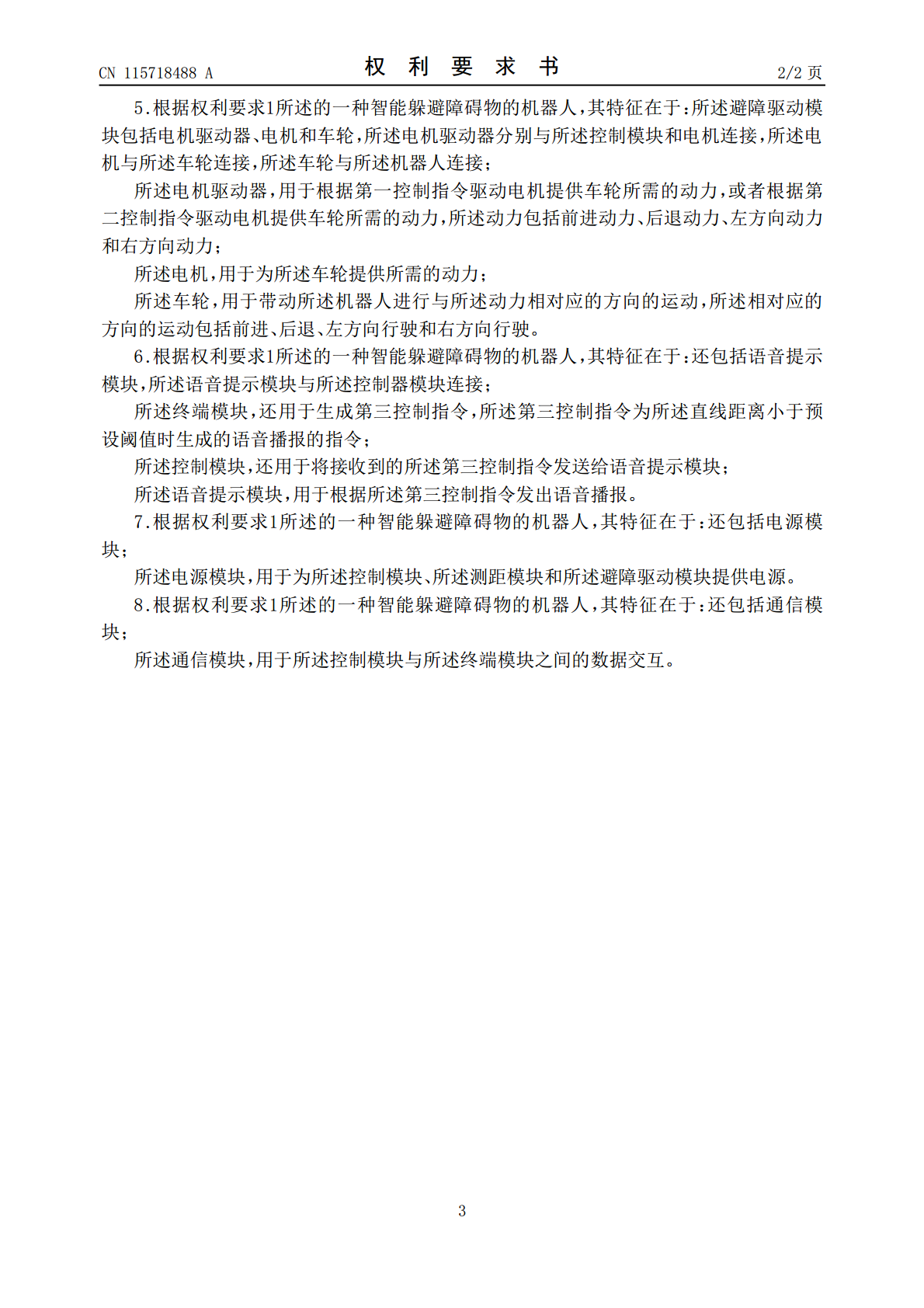
本发明涉及一种智能躲避障碍物的机器人,包括控制模块、测距模块、避障驱动模块和终端模块,控制模块分别与避障驱动模块、测距模块和终端模块连接,通过本发明的机器人,可以实现对障碍物的识别,以及规划躲避障碍物的新的行驶路线,解决了现有机器人在行驶过程中无法规避障碍物的问题。

一种障碍物躲避装置及其使用方法.pdf
一种障碍物躲避装置及其使用方法,用于指示车体的宽度、车轮的指向及位置的激光指示设备Ⅰ;所述激光指示设备Ⅰ,包括:电源,用于给设备Ⅰ供电;激光二极管驱动电路,用于驱动激光二极管生成激光;激光点生成单元,用于生成激光;激光点阵面板,包括多个激光点生成单元;转向控制器,控制激光点阵面板和车轮同时向左转或向右转,并且转向角度相同;本申请通过控制车辆转向角度,避免了车体或者轮胎刮碰到或者轧到障碍物造成损伤。
一种用于躲避水面与障碍物的盲人辅助眼镜.pdf
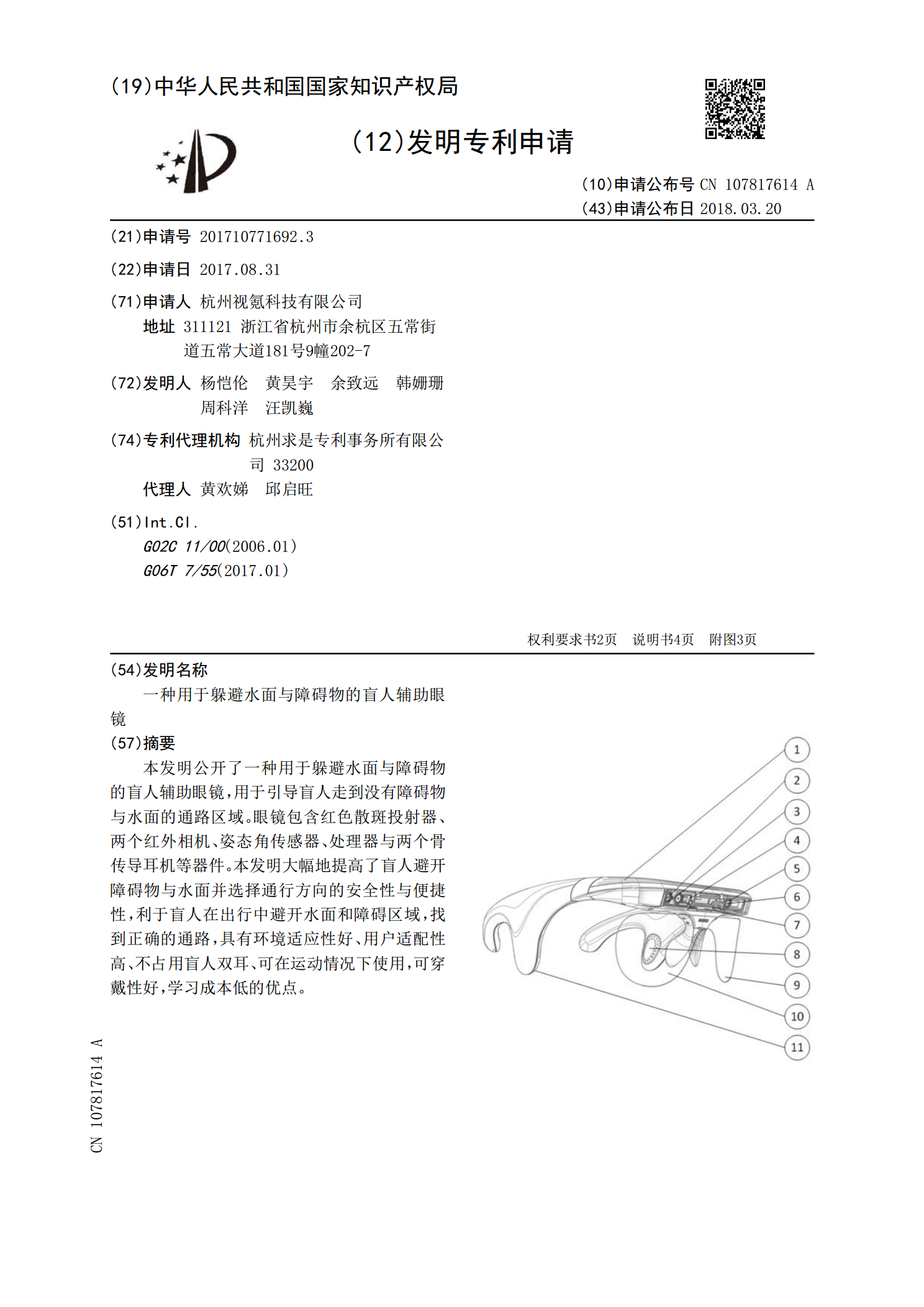
本发明公开了一种用于躲避水面与障碍物的盲人辅助眼镜,用于引导盲人走到没有障碍物与水面的通路区域。眼镜包含红色散斑投射器、两个红外相机、姿态角传感器、处理器与两个骨传导耳机等器件。本发明大幅地提高了盲人避开障碍物与水面并选择通行方向的安全性与便捷性,利于盲人在出行中避开水面和障碍区域,找到正确的通路,具有环境适应性好、用户适配性高、不占用盲人双耳、可在运动情况下使用,可穿戴性好,学习成本低的优点。

2017新手如何躲避障碍物.docx
2017新手如何躲避障碍物一、方向盘操作:由慢到快,逐步进行1、正确把握方向盘想平稳转动方向盘,首先要正确把握方向盘,具体操作如下图:2、由慢到快,逐步打轮路面越滑就越要平稳地转动方向盘,且方向盘转动幅度不应大于半圈。完成闪避动作后应迅速将方向盘回正,这样汽车很快就会从左右摇摆的状态中恢复平稳。特别注意的是驾驶者在整个过程中不要紧盯着障碍物,而是应将视线对着正确的行驶方向。二、最好的办法:保持安全车距我们最常见的车型,都是后驱动车辆,容易造成转向过度;所以驾驶后驱车更要做到慢打方向,否则很容易出现侧翻的事

自动躲避障碍物的脚本教程.pdf
自动躲避障碍物的脚本教程1、创建角色。从图片库,挑选一只恐龙角色,并将其名称改为“恐龙”。挑选一个物品,作为障碍物角色,并将其名称改为“障碍物”。2、创建结束背景。在舞台背景里,新建一个背景,输入文字“GameOver”游戏结束字样。并将两个背景的名称分别改为“游戏进行”“游戏结束”。3、创建分数变量。在角色的“程序”界面,找到“数据”,鼠标点击“建立一个变量”。变量名称为“游戏分数”。这个变量是用于记录游戏成绩的。4、编写游戏程序。恐龙控制程序:检测到键盘的“空格键”按下时,先跳起来,后落下。障碍物产生