
车辆环境估计装置.pdf

康佳****文库


1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车辆环境估计装置.pdf
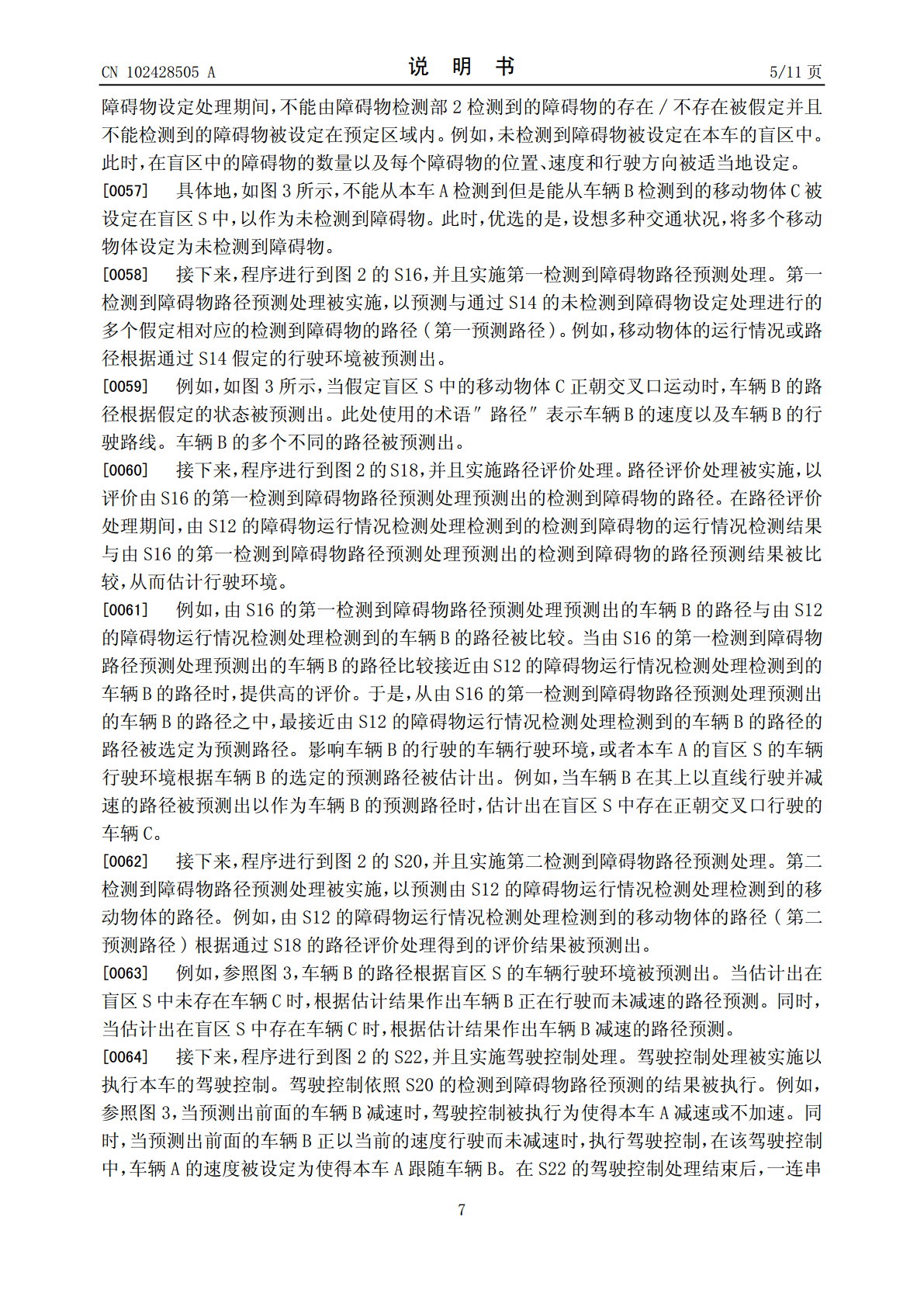
公开了一种车辆环境估计装置,其能根据正在盲区中运动的移动物体等的预测路径准确地估计出本车周围的行驶环境。安装在本车中的车辆环境估计装置检测在本车附近的另一车辆的运行情况,并根据另一车辆的运行情况来估计影响另一车辆的行驶的行驶环境。例如,根据另一车辆的运行情况来估计正在盲区中行驶的另一车辆的存在。因此,能估计出不能由本车识别但是能由在本车附近的另一车辆识别的车辆行驶环境。
车辆状态估计装置.pdf
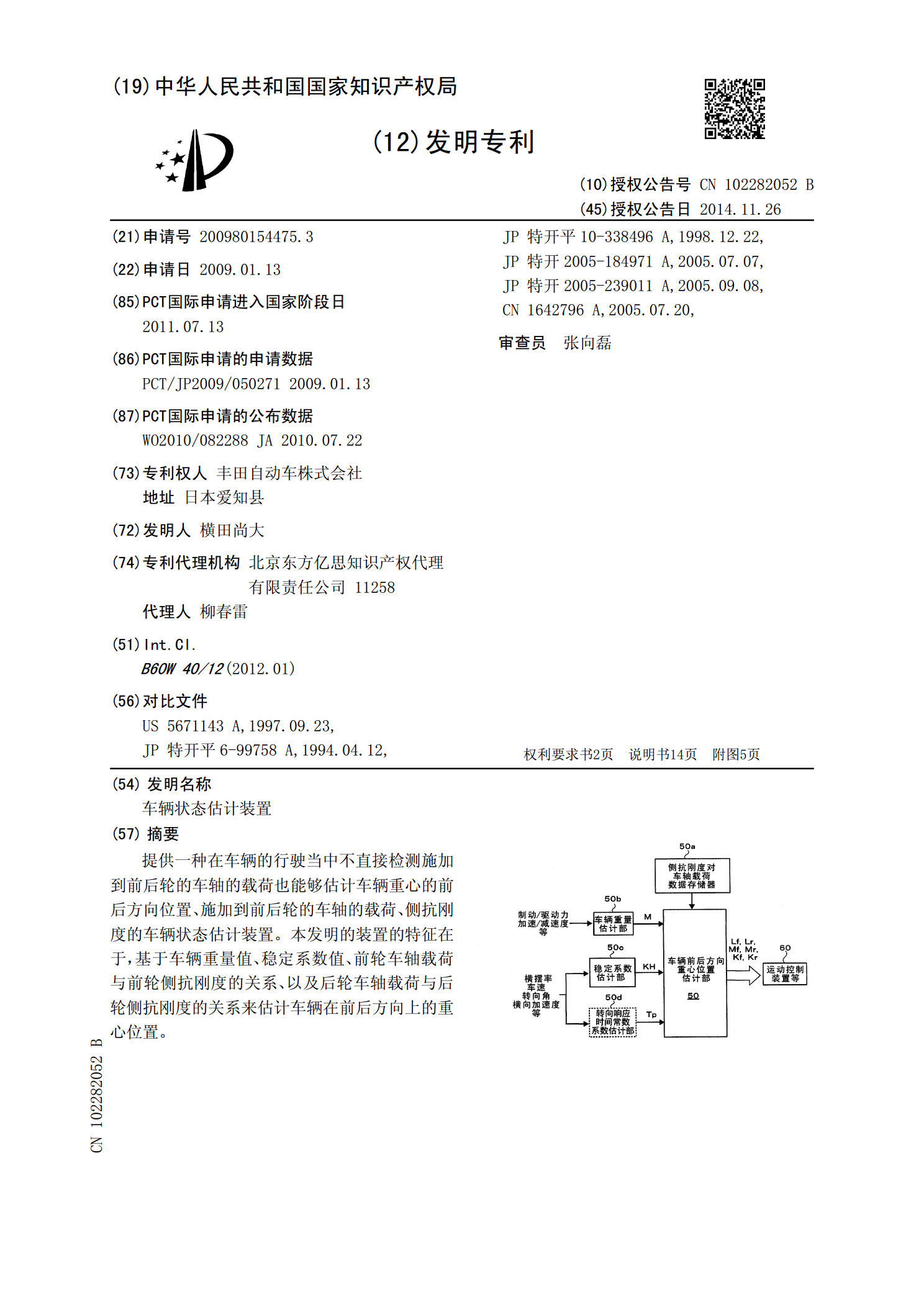
提供一种在车辆的行驶当中不直接检测施加到前后轮的车轴的载荷也能够估计车辆重心的前后方向位置、施加到前后轮的车轴的载荷、侧抗刚度的车辆状态估计装置。本发明的装置的特征在于,基于车辆重量值、稳定系数值、前轮车轴载荷与前轮侧抗刚度的关系、以及后轮车轴载荷与后轮侧抗刚度的关系来估计车辆在前后方向上的重心位置。
车辆侧向风估计方法、装置及车辆.pdf
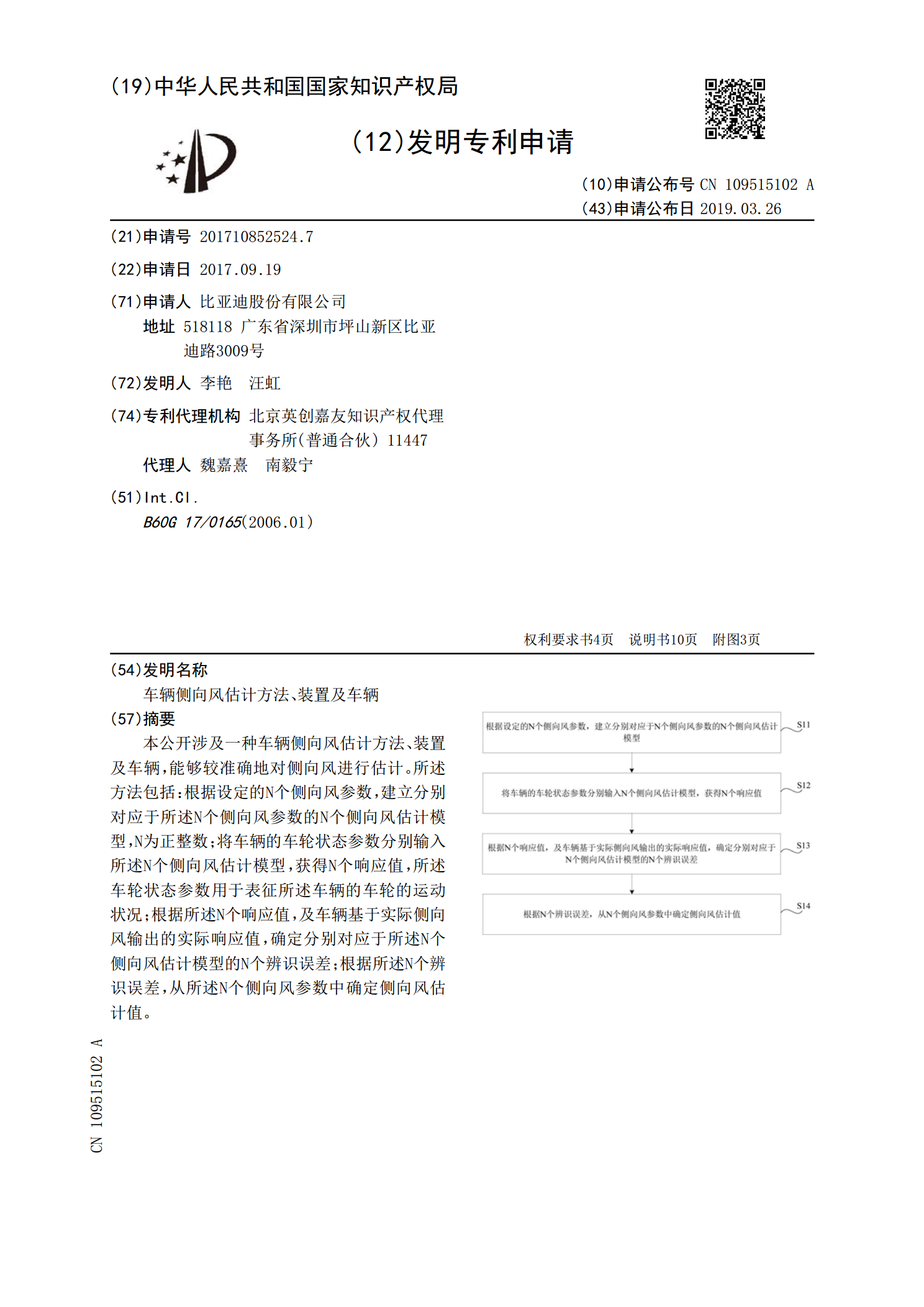
本公开涉及一种车辆侧向风估计方法、装置及车辆,能够较准确地对侧向风进行估计。所述方法包括:根据设定的N个侧向风参数,建立分别对应于所述N个侧向风参数的N个侧向风估计模型,N为正整数;将车辆的车轮状态参数分别输入所述N个侧向风估计模型,获得N个响应值,所述车轮状态参数用于表征所述车辆的车轮的运动状况;根据所述N个响应值,及车辆基于实际侧向风输出的实际响应值,确定分别对应于所述N个侧向风估计模型的N个辨识误差;根据所述N个辨识误差,从所述N个侧向风参数中确定侧向风估计值。
车辆轮胎饱和度估计装置.pdf
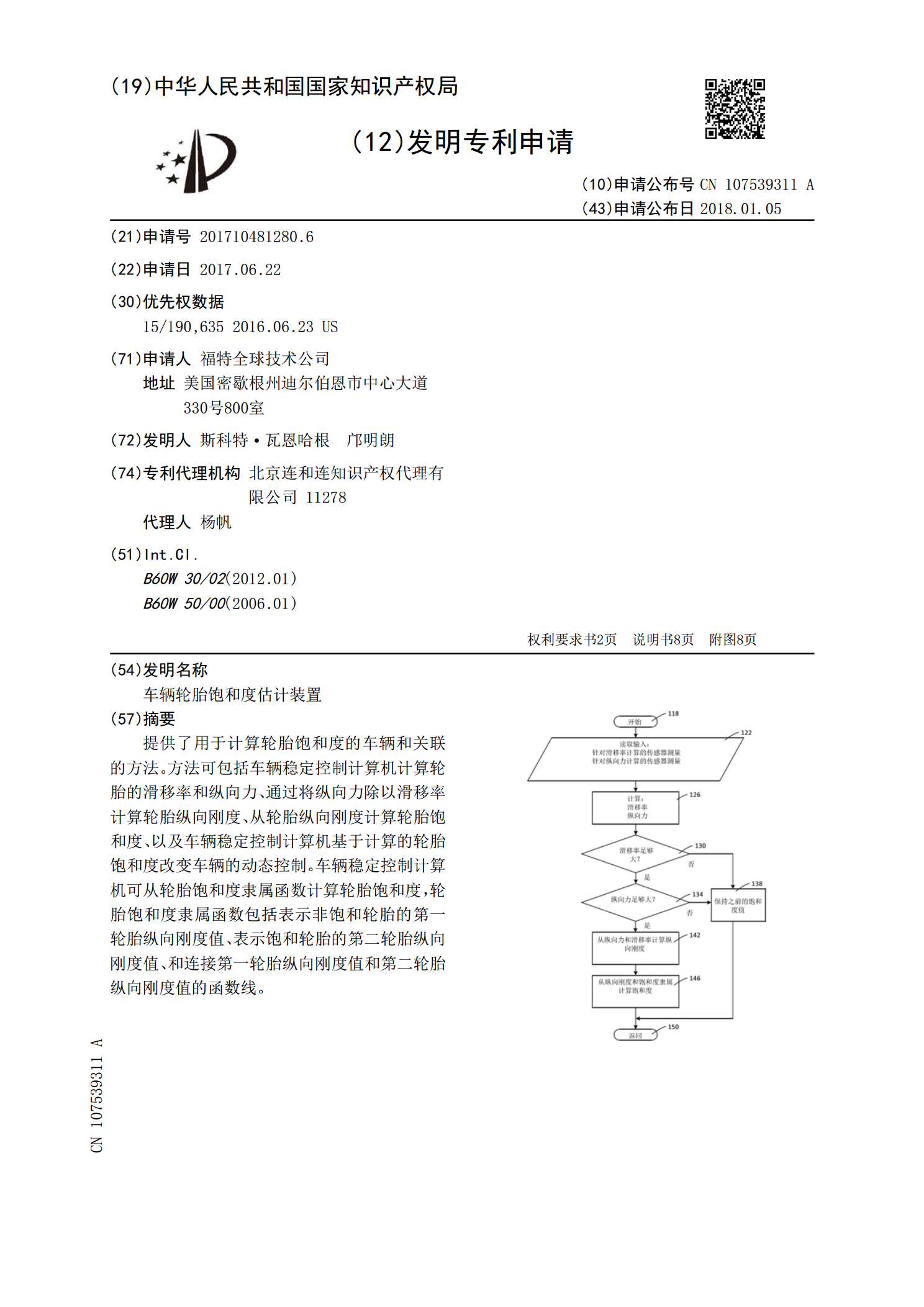
提供了用于计算轮胎饱和度的车辆和关联的方法。方法可包括车辆稳定控制计算机计算轮胎的滑移率和纵向力、通过将纵向力除以滑移率计算轮胎纵向刚度、从轮胎纵向刚度计算轮胎饱和度、以及车辆稳定控制计算机基于计算的轮胎饱和度改变车辆的动态控制。车辆稳定控制计算机可从轮胎饱和度隶属函数计算轮胎饱和度,轮胎饱和度隶属函数包括表示非饱和轮胎的第一轮胎纵向刚度值、表示饱和轮胎的第二轮胎纵向刚度值、和连接第一轮胎纵向刚度值和第二轮胎纵向刚度值的函数线。
车辆用的估计舵角算出装置.pdf
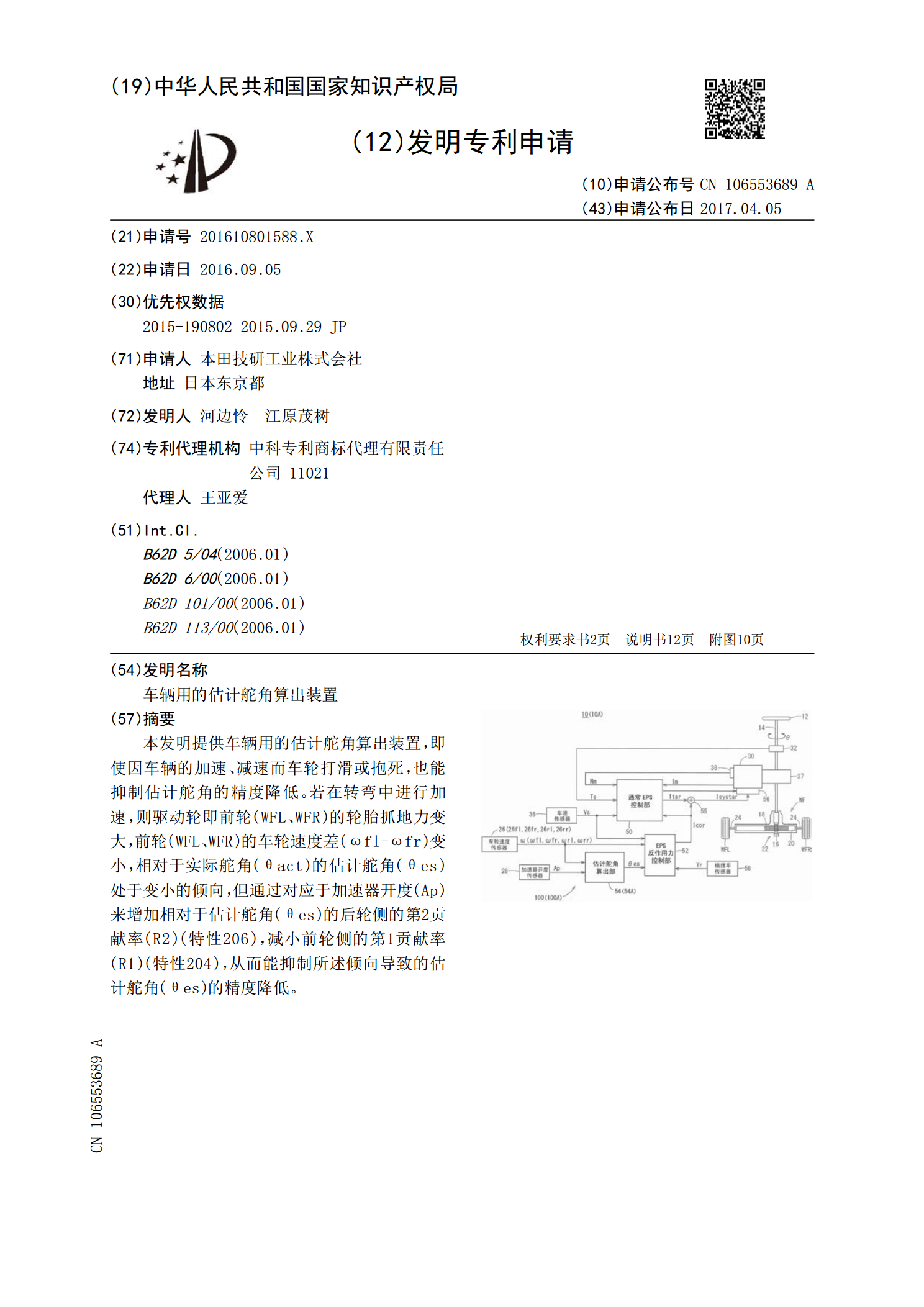
本发明提供车辆用的估计舵角算出装置,即使因车辆的加速、减速而车轮打滑或抱死,也能抑制估计舵角的精度降低。若在转弯中进行加速,则驱动轮即前轮(WFL、WFR)的轮胎抓地力变大,前轮(WFL、WFR)的车轮速度差(ωfl‑ωfr)变小,相对于实际舵角(θact)的估计舵角(θes)处于变小的倾向,但通过对应于加速器开度(Ap)来增加相对于估计舵角(θes)的后轮侧的第2贡献率(R2)(特性206),减小前轮侧的第1贡献率(R1)(特性204),从而能抑制所述倾向导致的估计舵角(θes)的精度降低。