
一种基于最大矩阵对角率的欠定盲分离方法.pdf

书生****瑞梦

1/10
2/10
3/10
4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于最大矩阵对角率的欠定盲分离方法.pdf
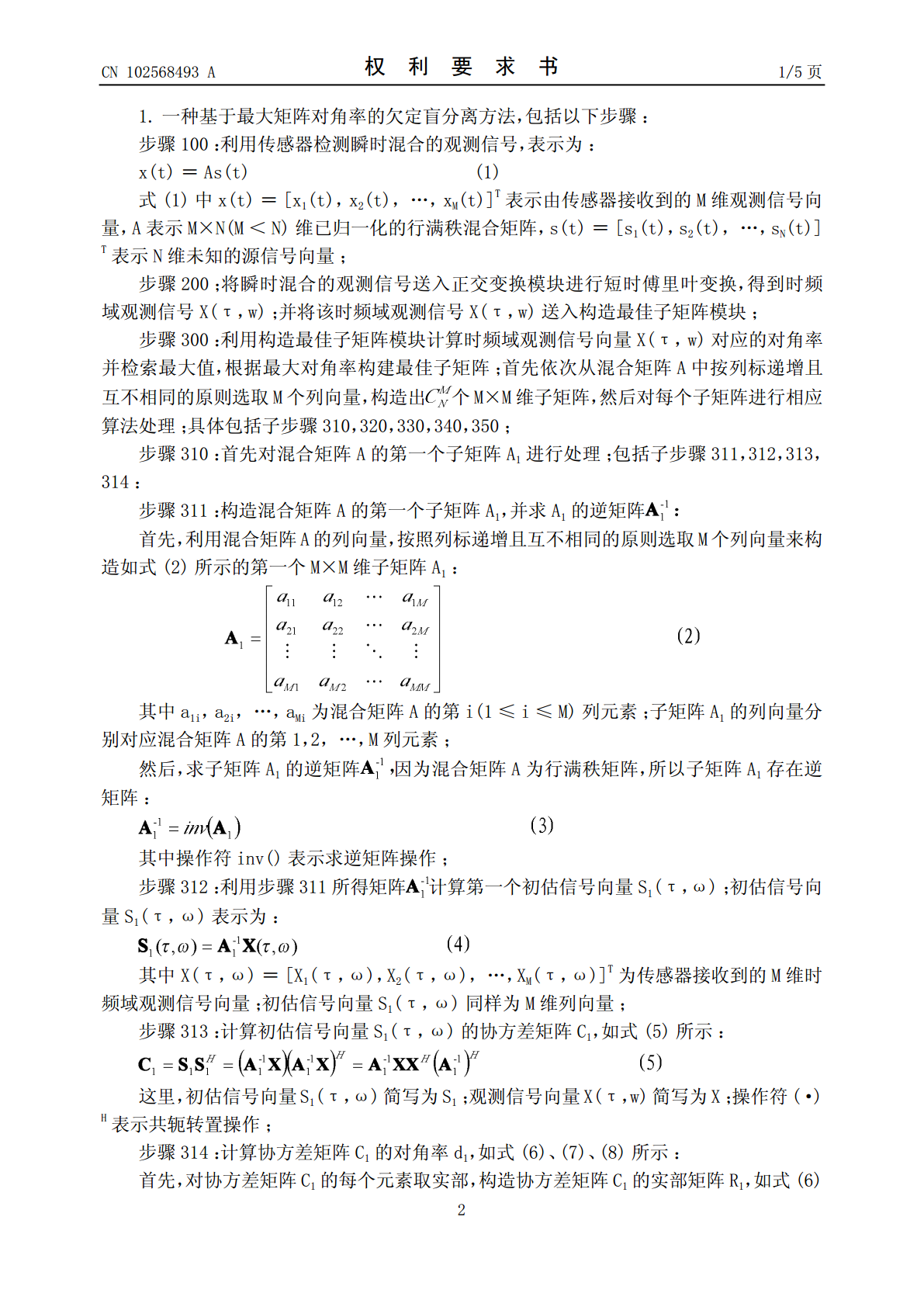
本发明公开一种基于最大矩阵对角率的欠定盲分离方法。本发明首先通过构造混合矩阵的个维子矩阵的逆矩阵(其中、分别为传感器个数和源信号个数);然后将逆矩阵与观测信号向量相乘得到个初估信号向量;最后依次计算每个初估信号向量的协方差矩阵、实部矩阵、绝对值矩阵,并计算对角率,取最大对角率对应的初估信号向量作为源信号向量的估计,从而实现了对源信号的欠定分离。本发明降低了对源信号稀疏性的要求,每个时频点上最多允许路源信号混叠,解决了音乐信号和噪声信号的欠定分离问题。对源信号的统计特性要求不高,解决了高斯信号和相关信号的欠

基于矩阵对角率的欠定盲分离技术研究的任务书.docx
基于矩阵对角率的欠定盲分离技术研究的任务书一、研究背景随着科技的不断发展和应用,越来越多的信号在实际中产生并被应用,比如音频信号、视频信号等。在实际应用中,不同信号之间可能存在相互干扰,这时我们需要进行信号分离,即将混合在一起的信号分离成单一的信号。经过长期的研究和实践,盲源分离技术被广泛应用于信号处理领域。欠定盲分离技术在盲源分离中具有很强的实用性和广泛的应用前景。基于矩阵对角率的欠定盲分离技术,是盲源分离领域的一种重要方法。该方法通过利用矩阵对角化的特性,将数据转换为对角矩阵的形式,从而实现信号的分离

一种基于矩阵变换的欠定盲分离方法.pdf
本发明公开一种基于矩阵变换的欠定盲分离方法。本发明通过对混合矩阵进行逐级变换得到变换矩阵,然后将变换矩阵作用于观测信号来逐步消去各源信号;并由各观测信号中新产生的零值点来构造多级二值掩蔽模板,将源信号进行逐级分离。本发明降低了对源信号稀疏性的要求,可以解决最多M-1路源信号的混叠(其中M为传感器个数),并且确切知道每个时频点由哪些源信号混合而成,解决了音乐信号和噪声信号的欠定分离问题。对源信号的统计特性要求不高,解决了高斯信号和相关信号的欠定分离问题。根据对分离精度的要求来调整处理级数,处理级数越多,得到

一种基于矩阵变换的欠定盲分离方法.pdf
本发明公开一种基于矩阵变换的欠定盲分离方法。本发明通过对混合矩阵进行逐级变换得到变换矩阵,然后将变换矩阵作用于观测信号来逐步消去各个源信号;并由各观测信号中新产生的零值点来构造多级二值掩蔽模板,将源信号进行逐级分离。本发明降低了对源信号稀疏性的要求,可以解决最多M-1路源信号的混叠(其中M为传感器个数),并且确切知道每个时频点由哪些源信号混合而成,解决了音乐信号和噪声信号的欠定分离问题。对源信号的统计特性要求不高,解决了高斯信号和相关信号的欠定分离问题。根据对分离精度的要求来调整处理级数,处理级数越多,得

基于稀疏特性的欠定盲分离矩阵A的估计方法.docx
基于稀疏特性的欠定盲分离矩阵A的估计方法摘要:欠定盲分离是一种较为复杂的通信信号处理问题。在这篇论文中,我们探讨了一种基于稀疏特性的欠定盲分离矩阵A的估计方法。首先,我们介绍了欠定盲分离问题的概念,并说明了其在通信系统中的应用。然后,我们重点介绍了基于稀疏特性的估计方法,包括稀疏表示和压缩感知。最后,我们通过实验结果来验证所提出的方法的有效性和可靠性。关键词:欠定盲分离、稀疏特性、稀疏表示、压缩感知1.介绍欠定盲分离是指从多个混合信号中恢复原始信号的过程,这些混合信号是通过一组线性组合得到的,但组合系数是