
一种后视倒车辅助系统和形成后视障碍图像的方法.pdf

Ja****23

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种后视倒车辅助系统和形成后视障碍图像的方法.pdf
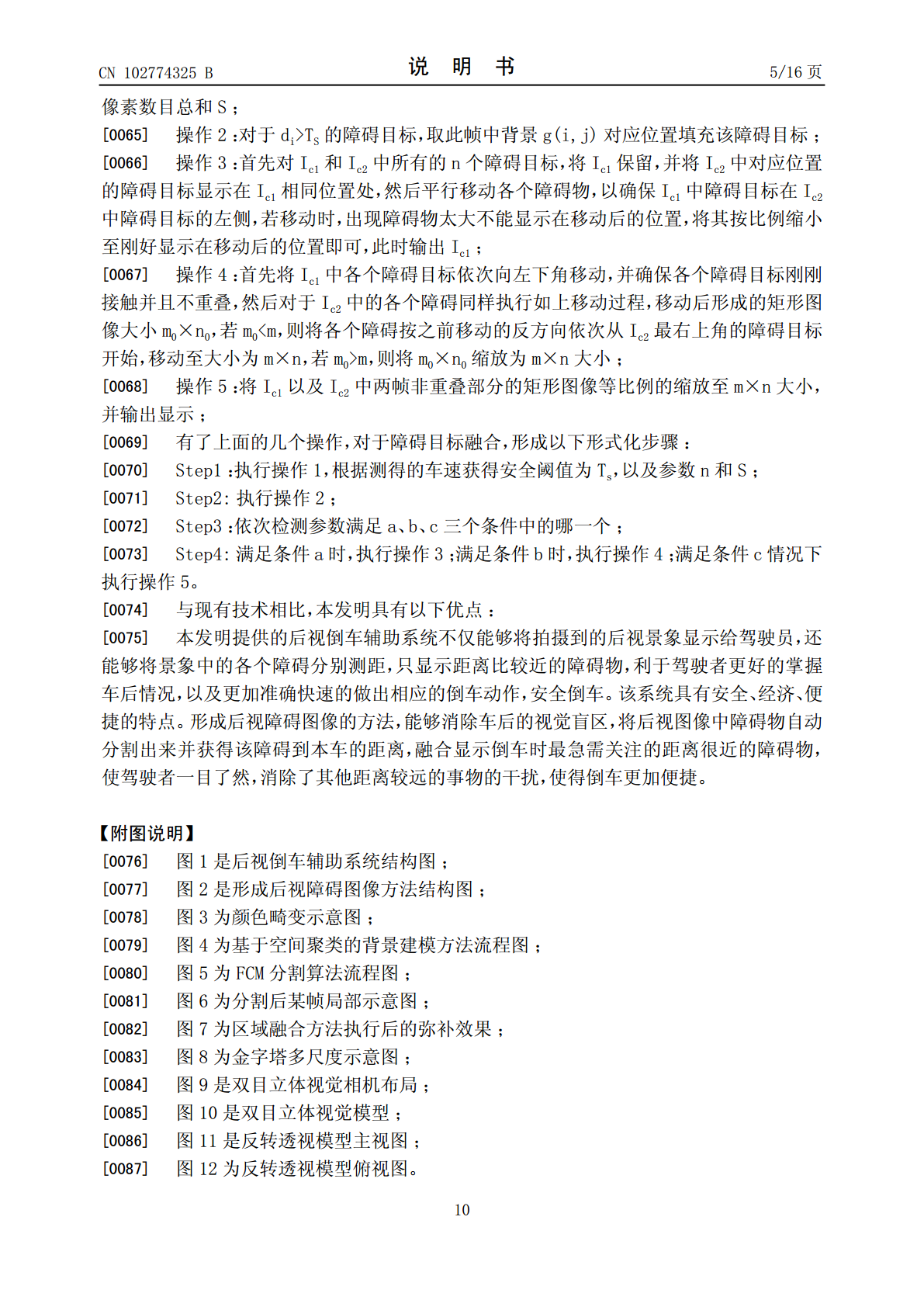
本发明公开了一种后视倒车辅助系统和形成后视障碍图像的方法,是一种在车辆后方两侧外表面固定且平行安装两个摄像头的基础上,对车辆倒车时后视场景中障碍物自动识别、测距,并最终融合显示的方法;该方法依次包括分割、测距以及融合三大部分;所述分割部分包括预处理、自适应FCM分割以及分割后处理;测距部分包括SIFT特征匹配、摄像头标定以及距离测量;融合部分主要是根据已经测得的距离信息,结合实际交通场景情况,建立相关规则并融合显示。本发明方法消除了车后的视觉盲区,将后视图像中障碍物自动分割出来并获得该障碍到本车的距离,融
一种车载倒车后视系统.pdf
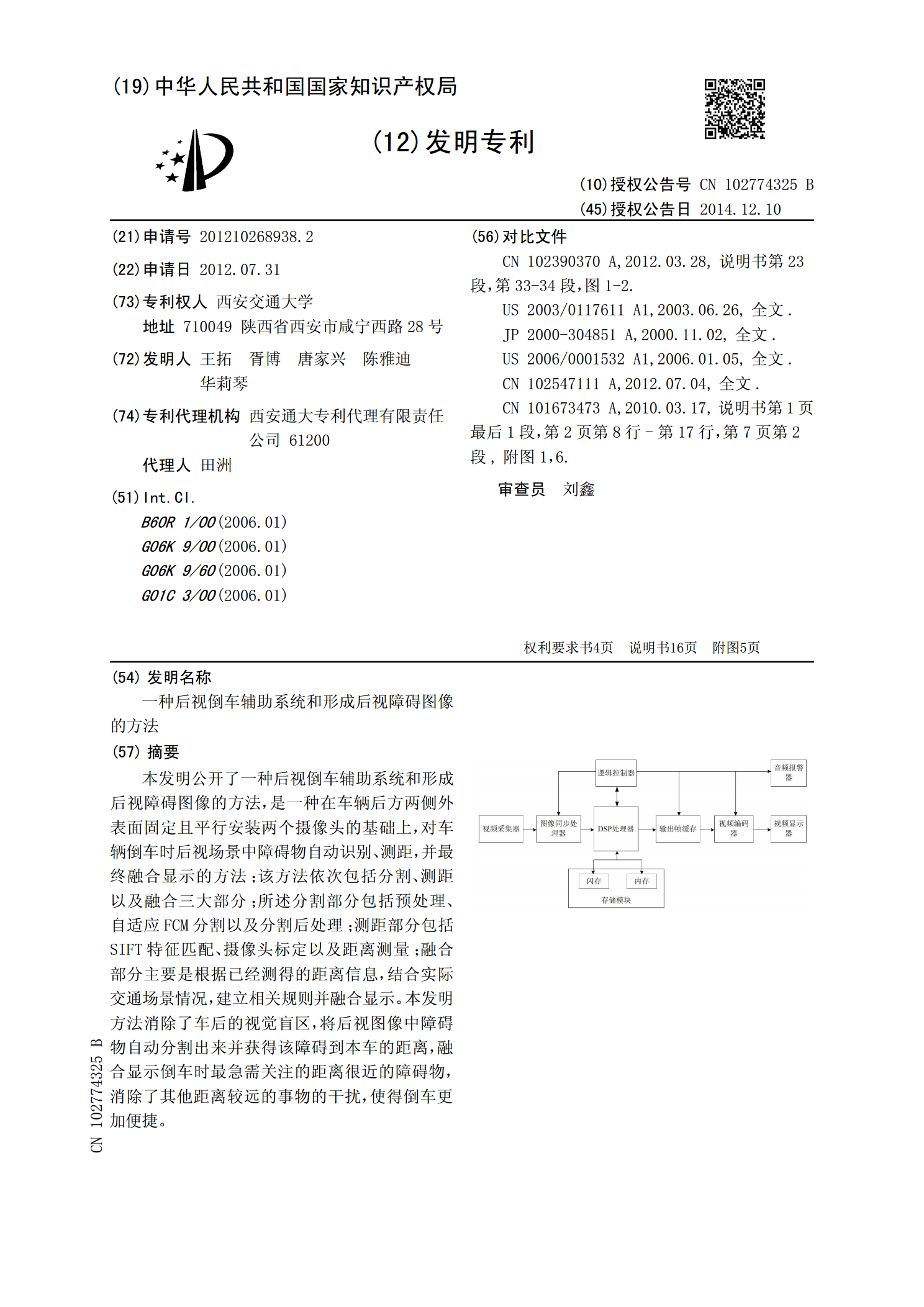
本发明公开了一种车载倒车后视系统,包括固定板,所述固定板的内部一侧设置有单片机,所述固定板的内部靠近单片机的一侧设置有无线发射模块,所述固定板的外表面一侧固定安装有电机,所述电机的输出端一侧设置有伸缩杆,所述伸缩杆的顶端一侧固定安装有滑动块,所述滑动块的内部一侧设置有摄像头,所述固定板的内部四个拐角处均开设有固定孔,所述滑动块的内壁两侧均设置有卡块,所述滑动块的内部一侧开设有固定槽,所述固定板的内部对应滑动块的一侧设置有滑轨。本发明所述的一种车载倒车后视系统,能够使得倒车时摄像头更加全面的进行摄像,减少了
一种汽车智能后视系统及图像显示方法.pdf
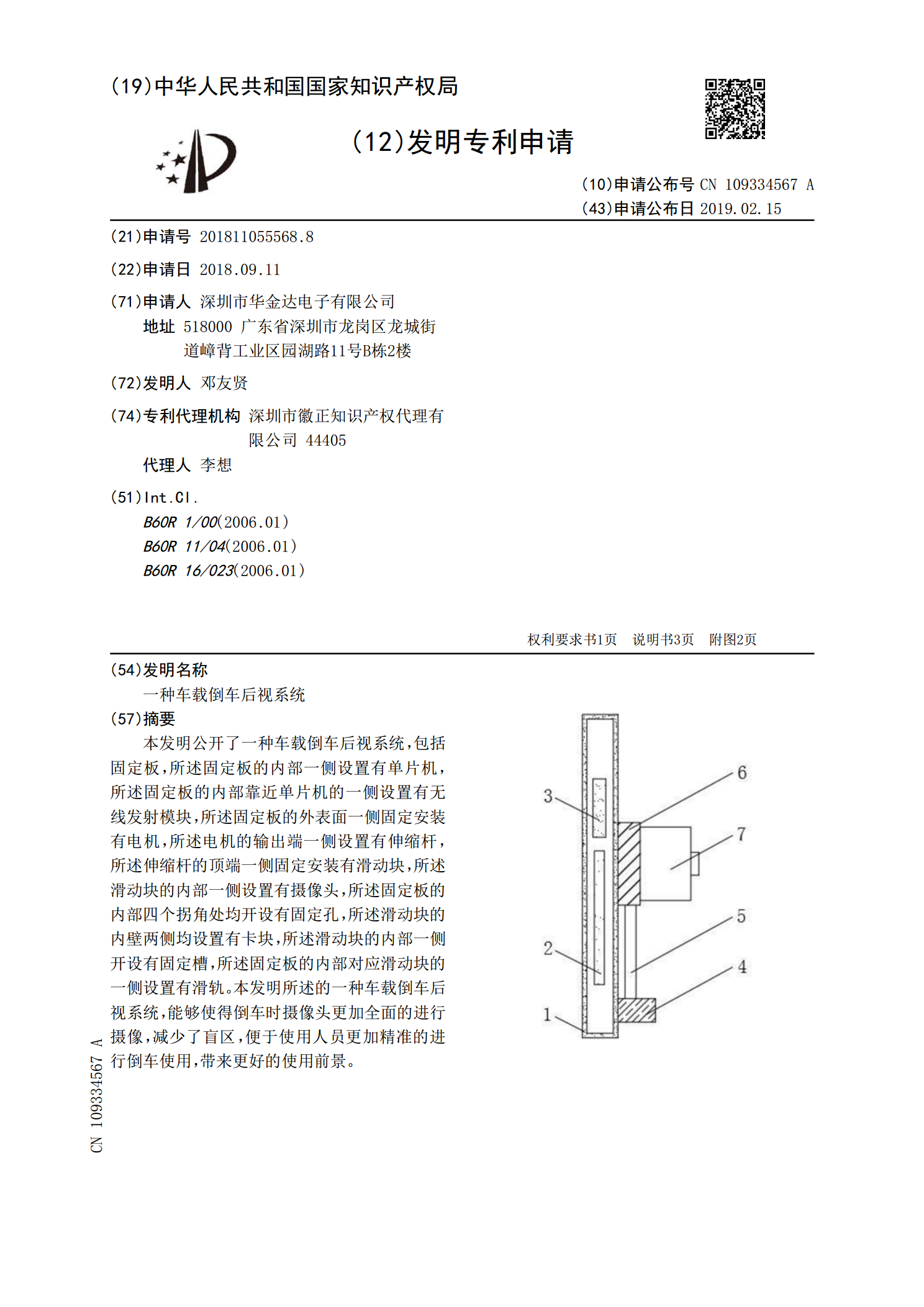
本发明公开了一种汽车智能后视系统,其包括图像采集装置、控制装置和显示屏;图像采集装置包括左后视摄像头、右后视摄像头、尾部后视摄像头和顶部后视摄像头;控制装置包括图像处理模块、拼接模块及切换模块。本发明的汽车智能后视系统能够在满足汽车后视不留死角和盲区的基础上,对汽车左后视图像、右后视图像、尾部后视图像和顶部后视图像进行拼接以得到汽车后方全景图像,并且可根据接收到的切换指令,将左后视图像、右后视图像、尾部后视图像、顶部后视图像或全景图像切换输出至显示屏进行显示。本发明还公开了一种汽车智能后视系统的图像显示方

基于ARM的无线倒车后视系统设计.docx
基于ARM的无线倒车后视系统设计无线倒车后视系统是一款基于ARM架构的智能辅助驾驶设备,它可以帮助驾驶员更加安全和方便地倒车,避免事故和损伤。本文将从系统基础结构、设计流程、性能分析等多方面展开论述,以便更好地理解并应用该技术。1.系统基础结构无线倒车后视系统主要由四个部分组成:摄像头、显示器、信号接收和处理单元、以及控制中心。摄像头用于获取倒车过程中车辆后方的影像,并将其传送至显示器。显示器通常安装在驾驶员座椅前方,用于显示倒车过程中的影像。信号接收和处理单元主要用于接收摄像头传来的信号,并通过处理解析
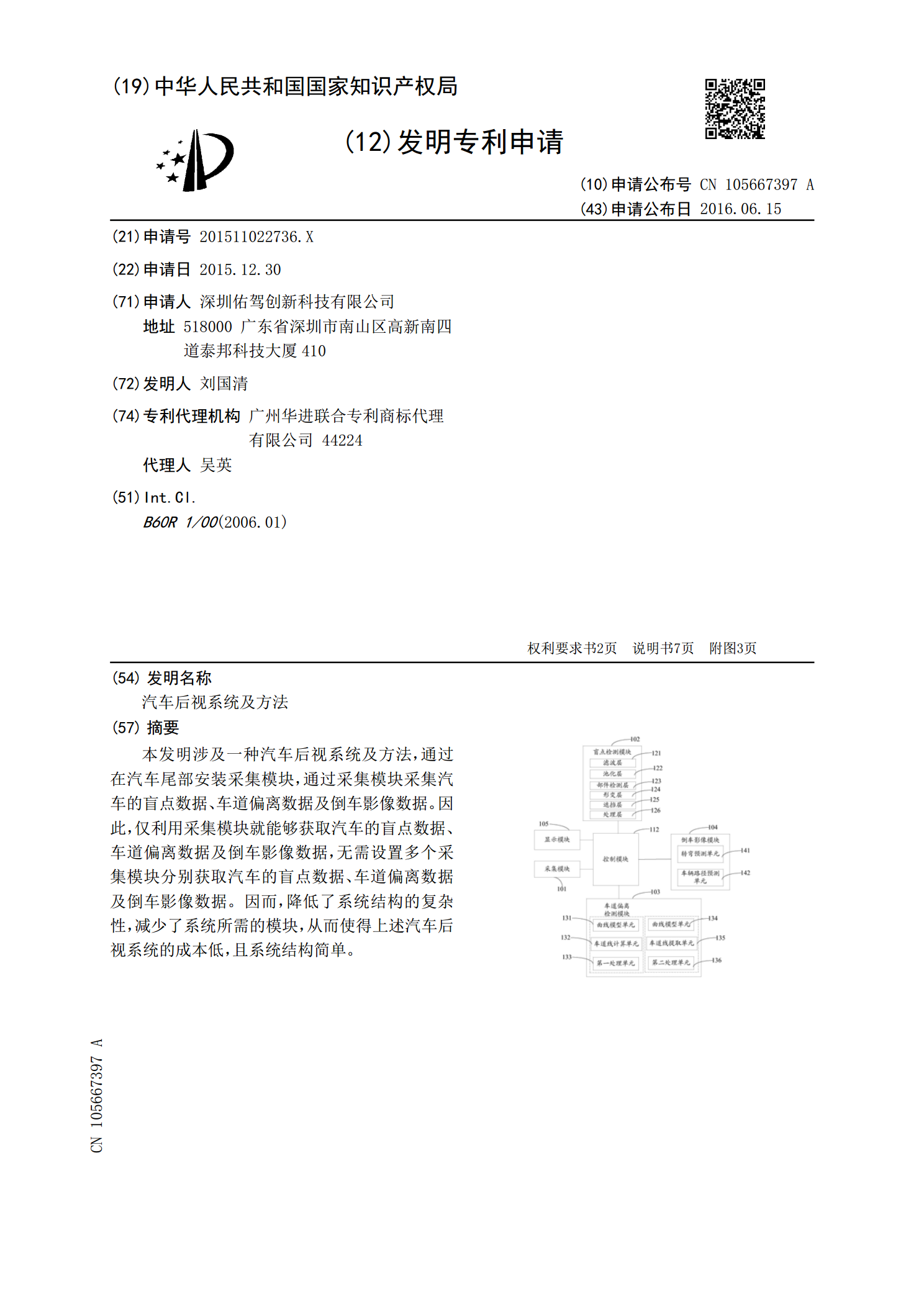
汽车后视系统及方法.pdf
本发明涉及一种汽车后视系统及方法,通过在汽车尾部安装采集模块,通过采集模块采集汽车的盲点数据、车道偏离数据及倒车影像数据。因此,仅利用采集模块就能够获取汽车的盲点数据、车道偏离数据及倒车影像数据,无需设置多个采集模块分别获取汽车的盲点数据、车道偏离数据及倒车影像数据。因而,降低了系统结构的复杂性,减少了系统所需的模块,从而使得上述汽车后视系统的成本低,且系统结构简单。