
基于ARM的无线倒车后视系统设计.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于ARM的无线倒车后视系统设计.docx
基于ARM的无线倒车后视系统设计无线倒车后视系统是一款基于ARM架构的智能辅助驾驶设备,它可以帮助驾驶员更加安全和方便地倒车,避免事故和损伤。本文将从系统基础结构、设计流程、性能分析等多方面展开论述,以便更好地理解并应用该技术。1.系统基础结构无线倒车后视系统主要由四个部分组成:摄像头、显示器、信号接收和处理单元、以及控制中心。摄像头用于获取倒车过程中车辆后方的影像,并将其传送至显示器。显示器通常安装在驾驶员座椅前方,用于显示倒车过程中的影像。信号接收和处理单元主要用于接收摄像头传来的信号,并通过处理解析

基于ARM的移动无线传输系统设计.docx
基于ARM的移动无线传输系统设计随着现代社会的快速发展,移动通信技术成为现代人生活中不可或缺的一部分。在这个过程中,移动无线传输系统扮演着至关重要的角色,它的技术创新对于提高无线网络的性能和用户体验有着不可忽视的作用。而基于ARM的移动无线传输系统体现了ARM架构和移动通信技术的结合,为实现高效的数据传输提供了强有力的支持。基于ARM的移动无线传输系统是一种新兴的移动通信技术,在该系统中,ARM芯片技术可以被集成在移动设备上,以改进设备的性能和无线传输速率。该系统的核心思想是采用ARM处理器作为控制器,控
基于ARM的无线视频监控系统设计.pptx
汇报人:CONTENTS添加章节标题ARM处理器介绍ARM处理器的特点ARM处理器的应用领域ARM处理器在无线视频监控系统中的应用优势无线视频监控系统概述无线视频监控系统的组成无线视频监控系统的功能无线视频监控系统的技术要求基于ARM的无线视频监控系统设计系统硬件设计系统软件设计无线传输方案选择与实现视频压缩与处理技术实现系统测试与性能分析测试环境与测试方法测试结果与分析系统性能优化方案结论与展望本论文的主要工作总结未来研究展望汇报人:
一种车载倒车后视系统.pdf
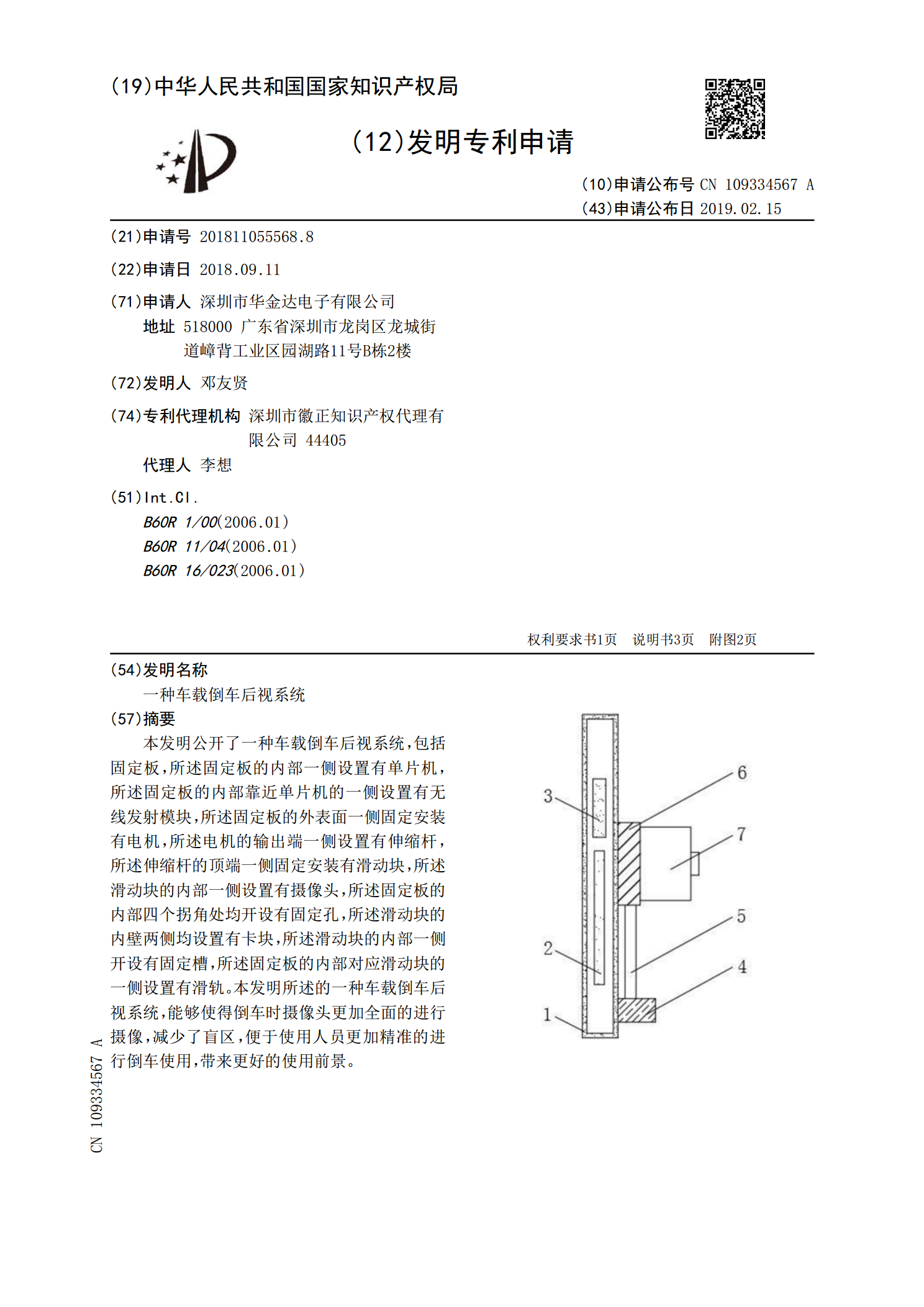
本发明公开了一种车载倒车后视系统,包括固定板,所述固定板的内部一侧设置有单片机,所述固定板的内部靠近单片机的一侧设置有无线发射模块,所述固定板的外表面一侧固定安装有电机,所述电机的输出端一侧设置有伸缩杆,所述伸缩杆的顶端一侧固定安装有滑动块,所述滑动块的内部一侧设置有摄像头,所述固定板的内部四个拐角处均开设有固定孔,所述滑动块的内壁两侧均设置有卡块,所述滑动块的内部一侧开设有固定槽,所述固定板的内部对应滑动块的一侧设置有滑轨。本发明所述的一种车载倒车后视系统,能够使得倒车时摄像头更加全面的进行摄像,减少了

基于ARM的无线图像采集系统设计.docx
基于ARM的无线图像采集系统设计基于ARM的无线图像采集系统设计摘要:随着无线通信和嵌入式系统的发展,无线图像采集系统得到了广泛的应用。本论文旨在设计一种基于ARM的无线图像采集系统,用于实时采集、处理和传输图像数据。在系统设计中,采用了ARM处理器作为控制核心,通过无线通信模块实现了图像数据的传输。本文将详细介绍系统的设计思路、硬件方案和软件实现等内容。关键词:ARM;无线图像采集;嵌入式系统;无线通信;图像处理一、引言无线图像采集系统是一种集图像采集、处理和传输于一体的综合系统,具有广泛的应用前景。无