
一种三舵机转向可切换的全方位探测智能小车.pdf

玄静****写意

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种三舵机转向可切换的全方位探测智能小车.pdf
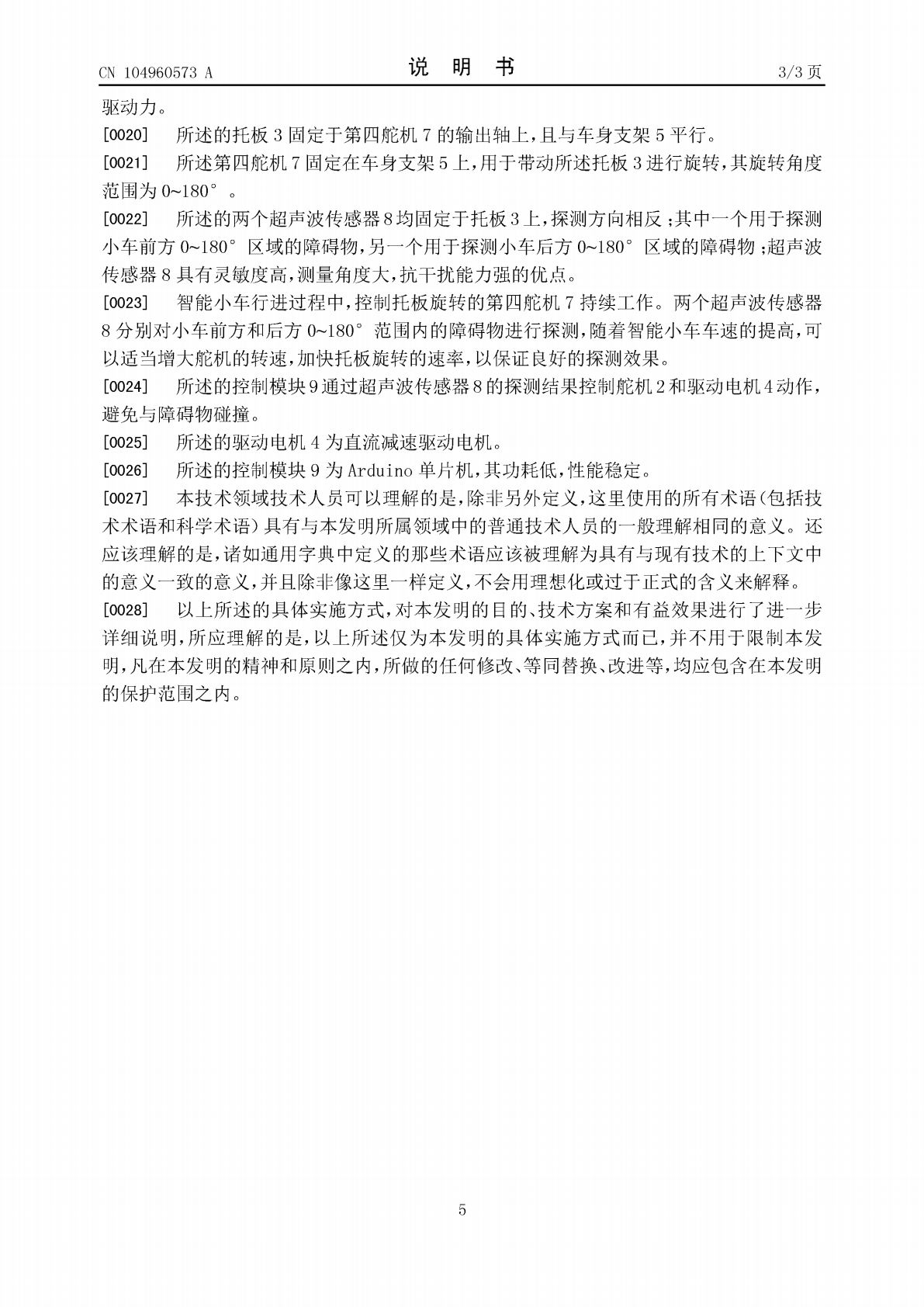
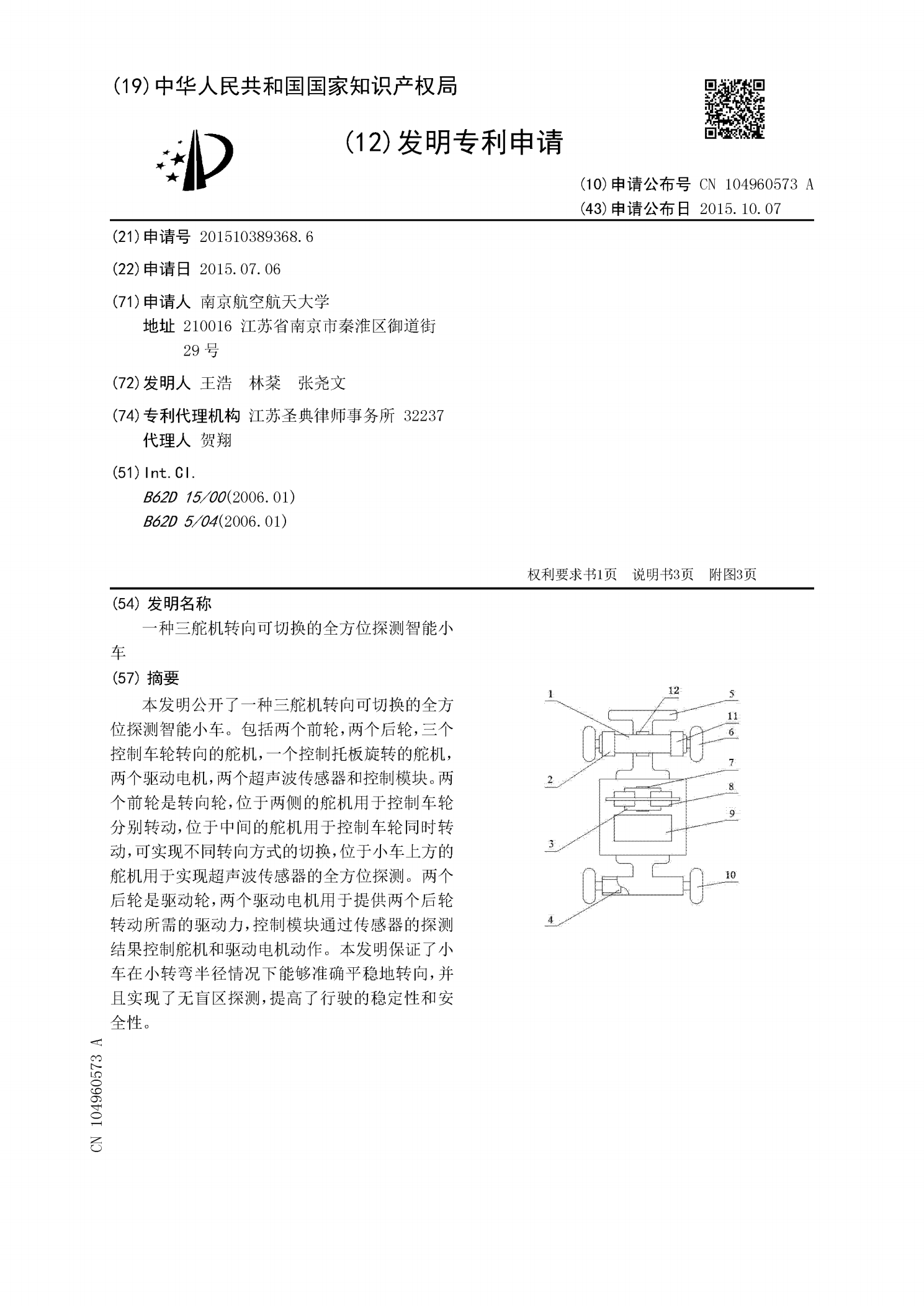
本发明公开了一种三舵机转向可切换的全方位探测智能小车。包括两个前轮,两个后轮,三个控制车轮转向的舵机,一个控制托板旋转的舵机,两个驱动电机,两个超声波传感器和控制模块。两个前轮是转向轮,位于两侧的舵机用于控制车轮分别转动,位于中间的舵机用于控制车轮同时转动,可实现不同转向方式的切换,位于小车上方的舵机用于实现超声波传感器的全方位探测。两个后轮是驱动轮,两个驱动电机用于提供两个后轮转动所需的驱动力,控制模块通过传感器的探测结果控制舵机和驱动电机动作。本发明保证了小车在小转弯半径情况下能够准确平稳地转向,并且

一种双舵机四轮驱动全方位超声波探测的小车.pdf
本发明公开了一种双舵机四轮驱动全方位超声波探测的小车,包括两个前轮、两个后轮、四个电机、两个舵机、四个超声波传感器、中央数据处理模块和支架,四个电机用于提供车轮转动的驱动力;两个舵机中的一个用于控制两个前轮的行进方向,另一个用于控制两个后轮的行进方向;四个超声波传感器中的两个分别设置在所述支架的两侧,用于感应小车两侧的障碍物;另外两个分别设置在两个舵机上,用于感应小车两个前轮行进方向上以及两个后轮行进方向上的障碍物;中央处理模块用于根据四个超声波传感器的感应结果控制四个电机和两个舵机工作。本发明采用舵机实
一种可全方位跟踪的智能红外探测装置.pdf
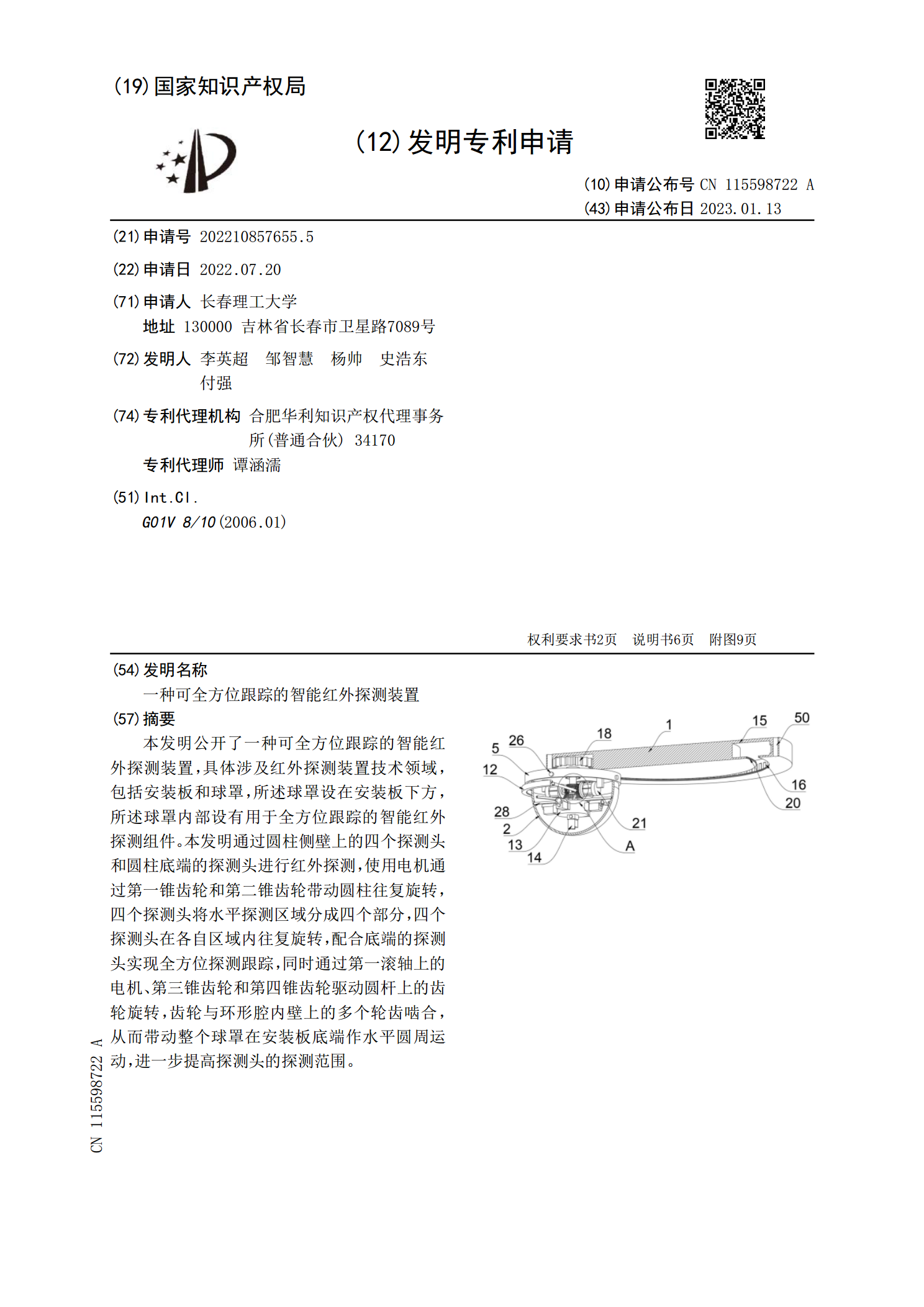
本发明公开了一种可全方位跟踪的智能红外探测装置,具体涉及红外探测装置技术领域,包括安装板和球罩,所述球罩设在安装板下方,所述球罩内部设有用于全方位跟踪的智能红外探测组件。本发明通过圆柱侧壁上的四个探测头和圆柱底端的探测头进行红外探测,使用电机通过第一锥齿轮和第二锥齿轮带动圆柱往复旋转,四个探测头将水平探测区域分成四个部分,四个探测头在各自区域内往复旋转,配合底端的探测头实现全方位探测跟踪,同时通过第一滚轴上的电机、第三锥齿轮和第四锥齿轮驱动圆杆上的齿轮旋转,齿轮与环形腔内壁上的多个轮齿啮合,从而带动整个球
一种全方位驱动转向的AGV小车.pdf
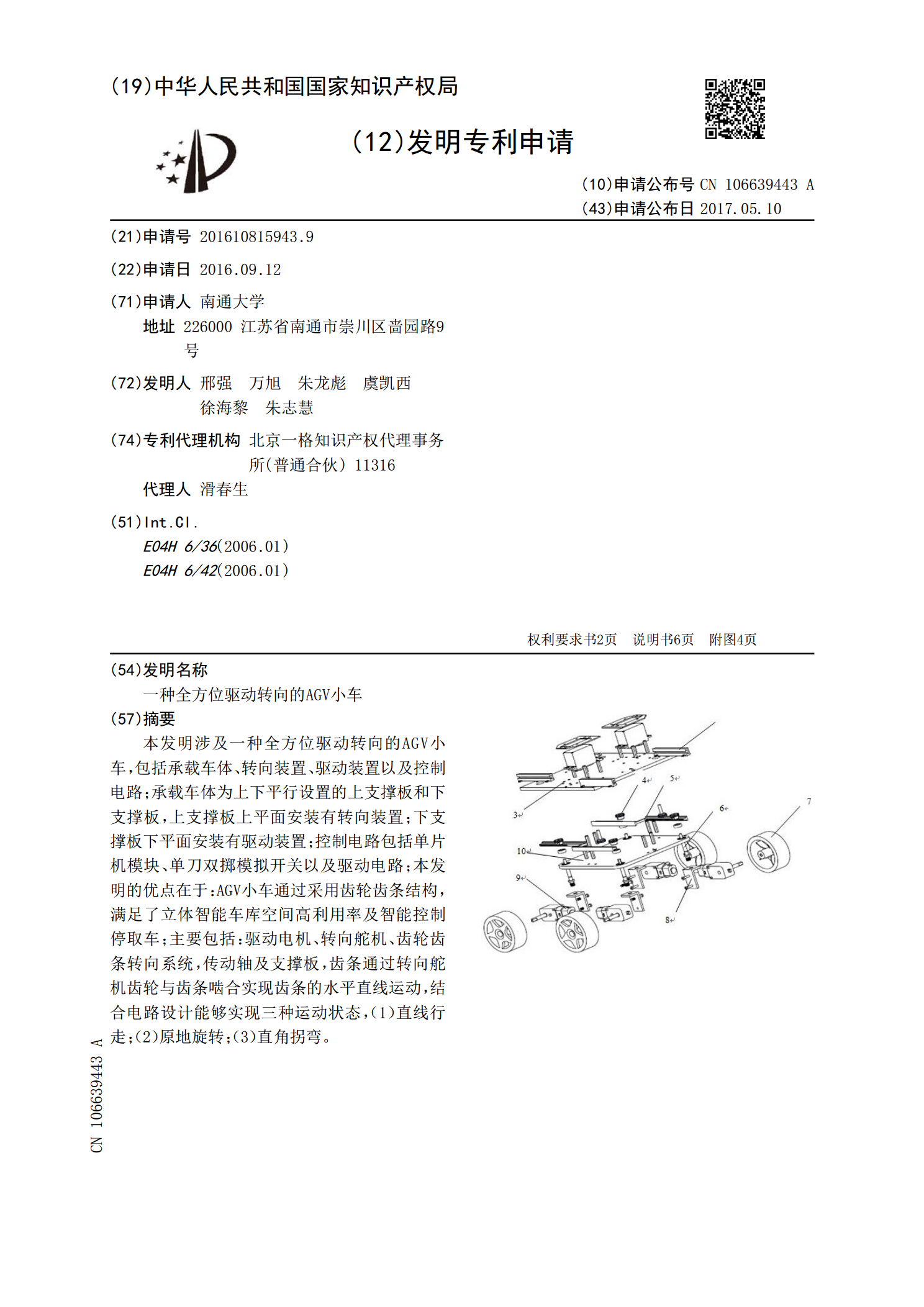
本发明涉及一种全方位驱动转向的AGV小车,包括承载车体、转向装置、驱动装置以及控制电路;承载车体为上下平行设置的上支撑板和下支撑板,上支撑板上平面安装有转向装置;下支撑板下平面安装有驱动装置;控制电路包括单片机模块、单刀双掷模拟开关以及驱动电路;本发明的优点在于:AGV小车通过采用齿轮齿条结构,满足了立体智能车库空间高利用率及智能控制停取车;主要包括:驱动电机、转向舵机、齿轮齿条转向系统,传动轴及支撑板,齿条通过转向舵机齿轮与齿条啮合实现齿条的水平直线运动,结合电路设计能够实现三种运动状态,(1)直线行走
360度全方位转向小车.pdf
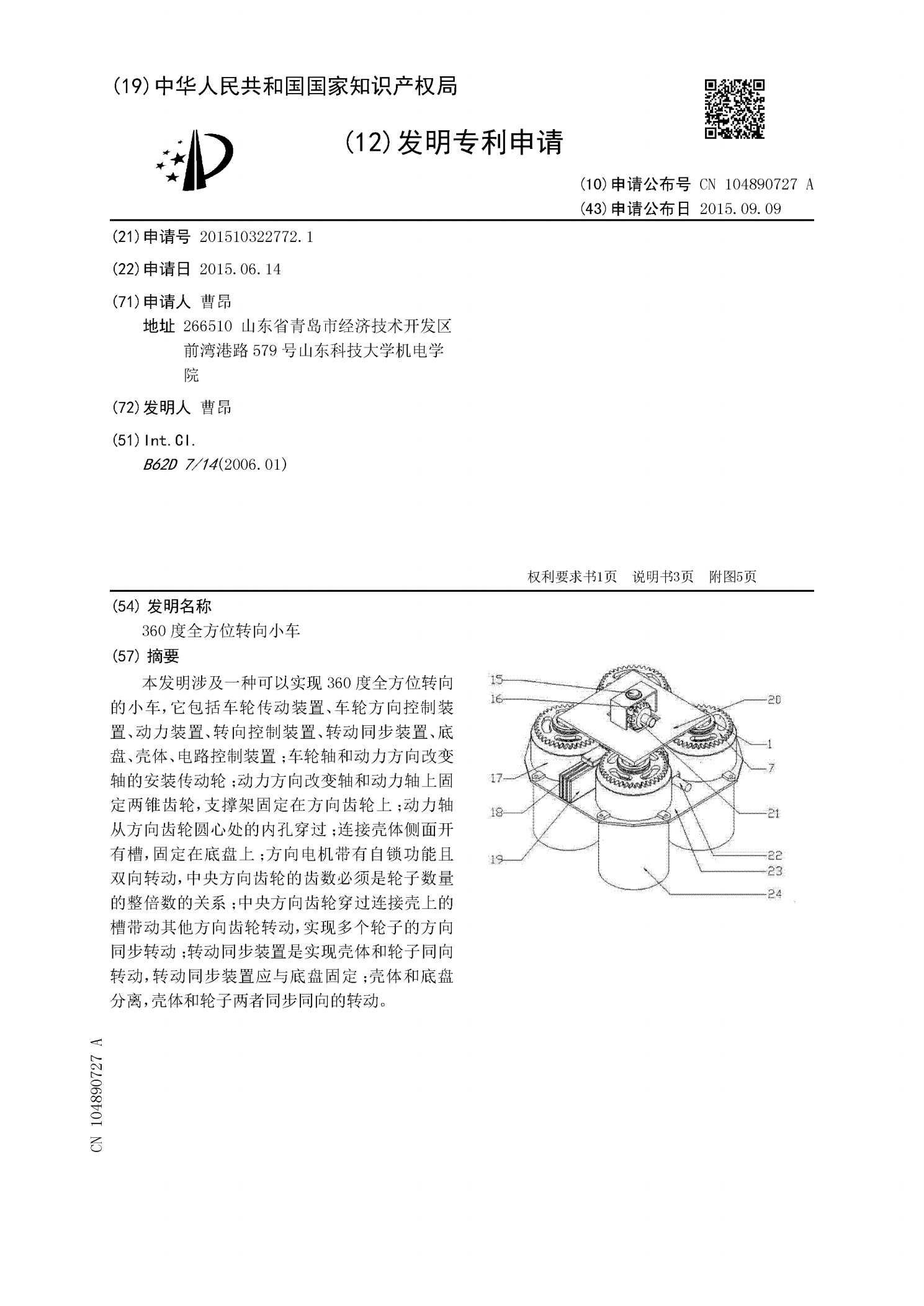
本发明涉及一种可以实现360度全方位转向的小车,它包括车轮传动装置、车轮方向控制装置、动力装置、转向控制装置、转动同步装置、底盘、壳体、电路控制装置;车轮轴和动力方向改变轴的安装传动轮;动力方向改变轴和动力轴上固定两锥齿轮,支撑架固定在方向齿轮上;动力轴从方向齿轮圆心处的内孔穿过;连接壳体侧面开有槽,固定在底盘上;方向电机带有自锁功能且双向转动,中央方向齿轮的齿数必须是轮子数量的整倍数的关系;中央方向齿轮穿过连接壳上的槽带动其他方向齿轮转动,实现多个轮子的方向同步转动;转动同步装置是实现壳体和轮子同向转动