
一种超声波测距方法及超声波测距装置.pdf

莉娜****ua

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
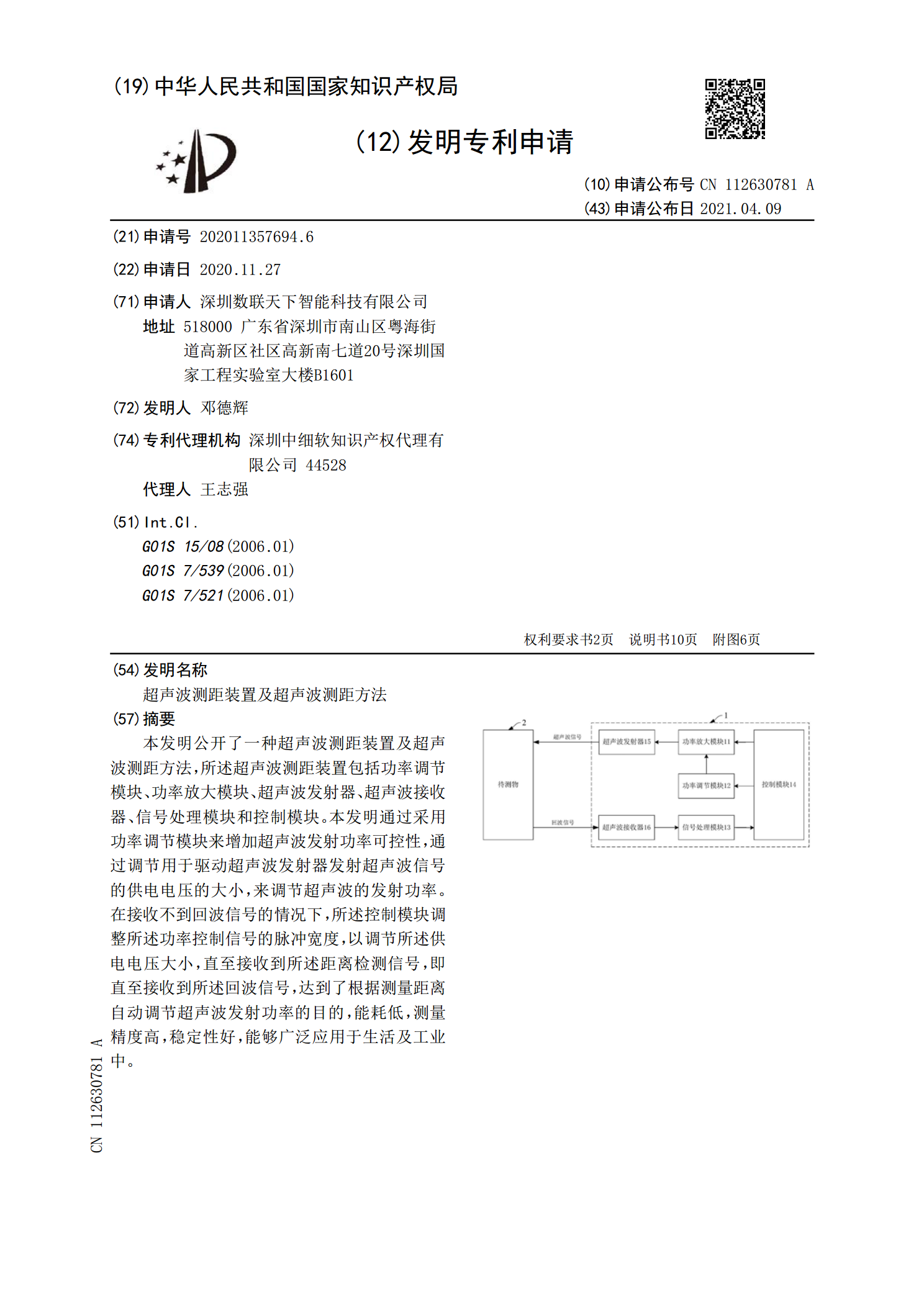
超声波测距装置及超声波测距方法.pdf
本发明公开了一种超声波测距装置及超声波测距方法,所述超声波测距装置包括功率调节模块、功率放大模块、超声波发射器、超声波接收器、信号处理模块和控制模块。本发明通过采用功率调节模块来增加超声波发射功率可控性,通过调节用于驱动超声波发射器发射超声波信号的供电电压的大小,来调节超声波的发射功率。在接收不到回波信号的情况下,所述控制模块调整所述功率控制信号的脉冲宽度,以调节所述供电电压大小,直至接收到所述距离检测信号,即直至接收到所述回波信号,达到了根据测量距离自动调节超声波发射功率的目的,能耗低,测量精度高,稳定
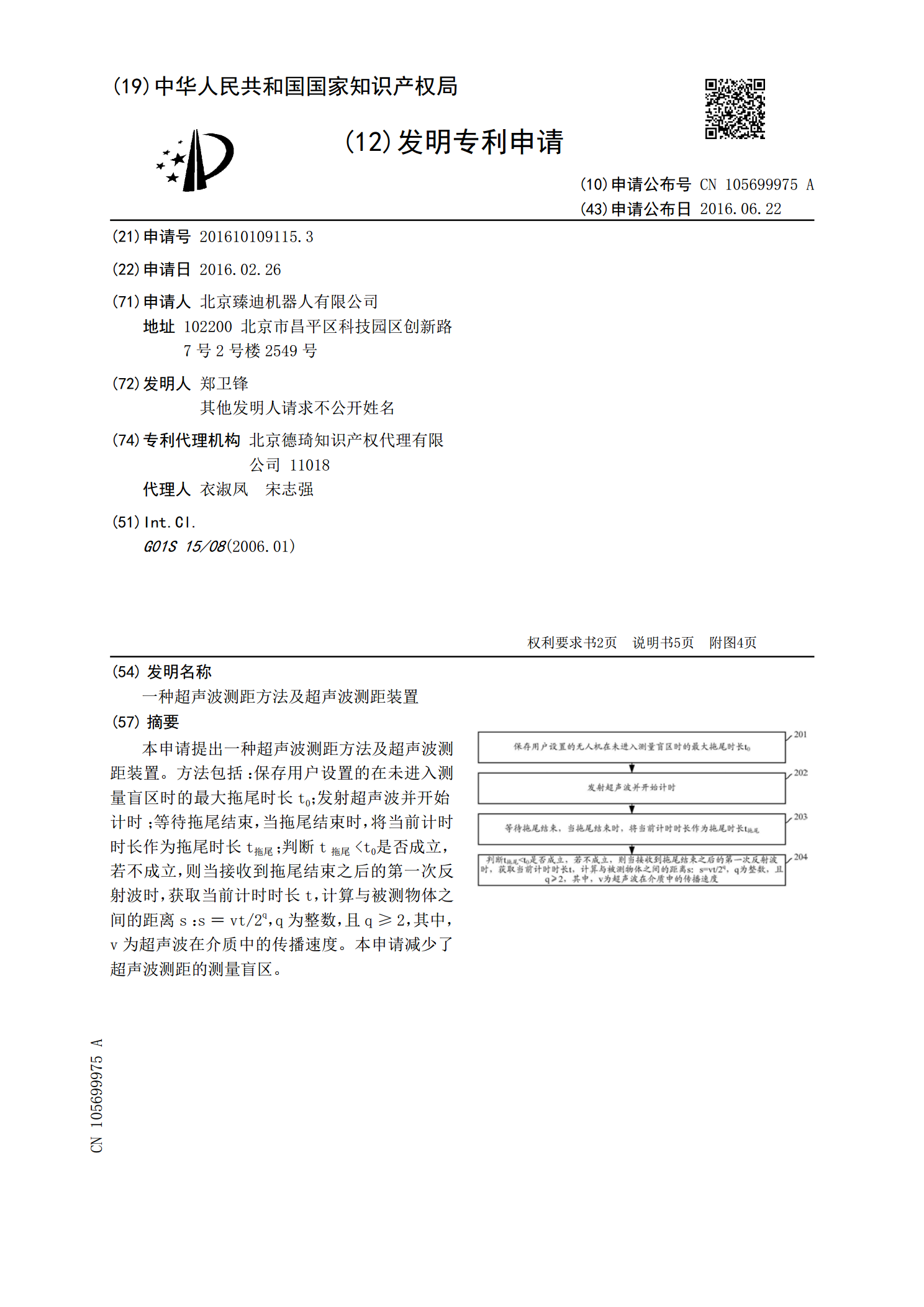
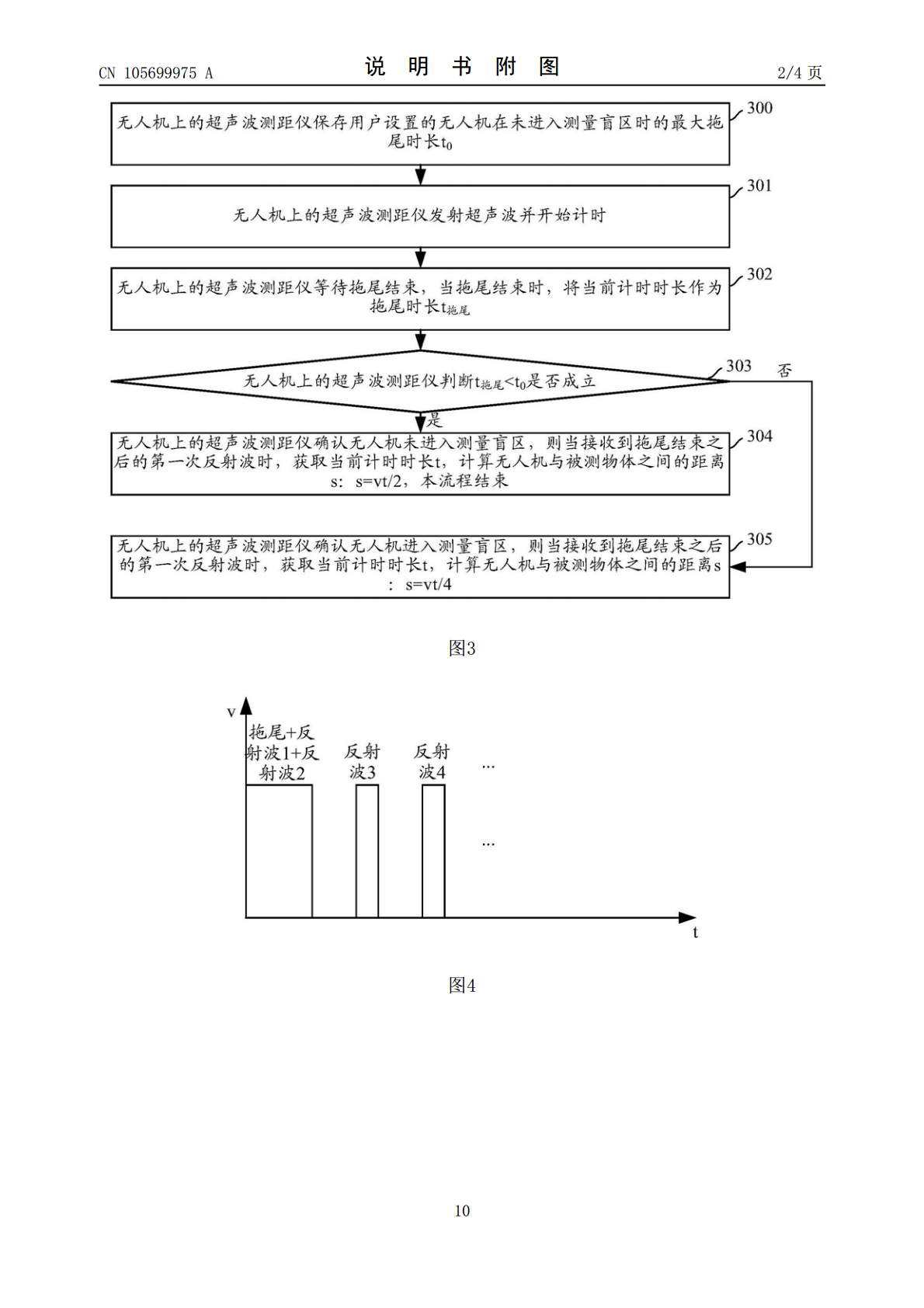
一种超声波测距方法及超声波测距装置.pdf
本申请提出一种超声波测距方法及超声波测距装置。方法包括:保存用户设置的在未进入测量盲区时的最大拖尾时长t
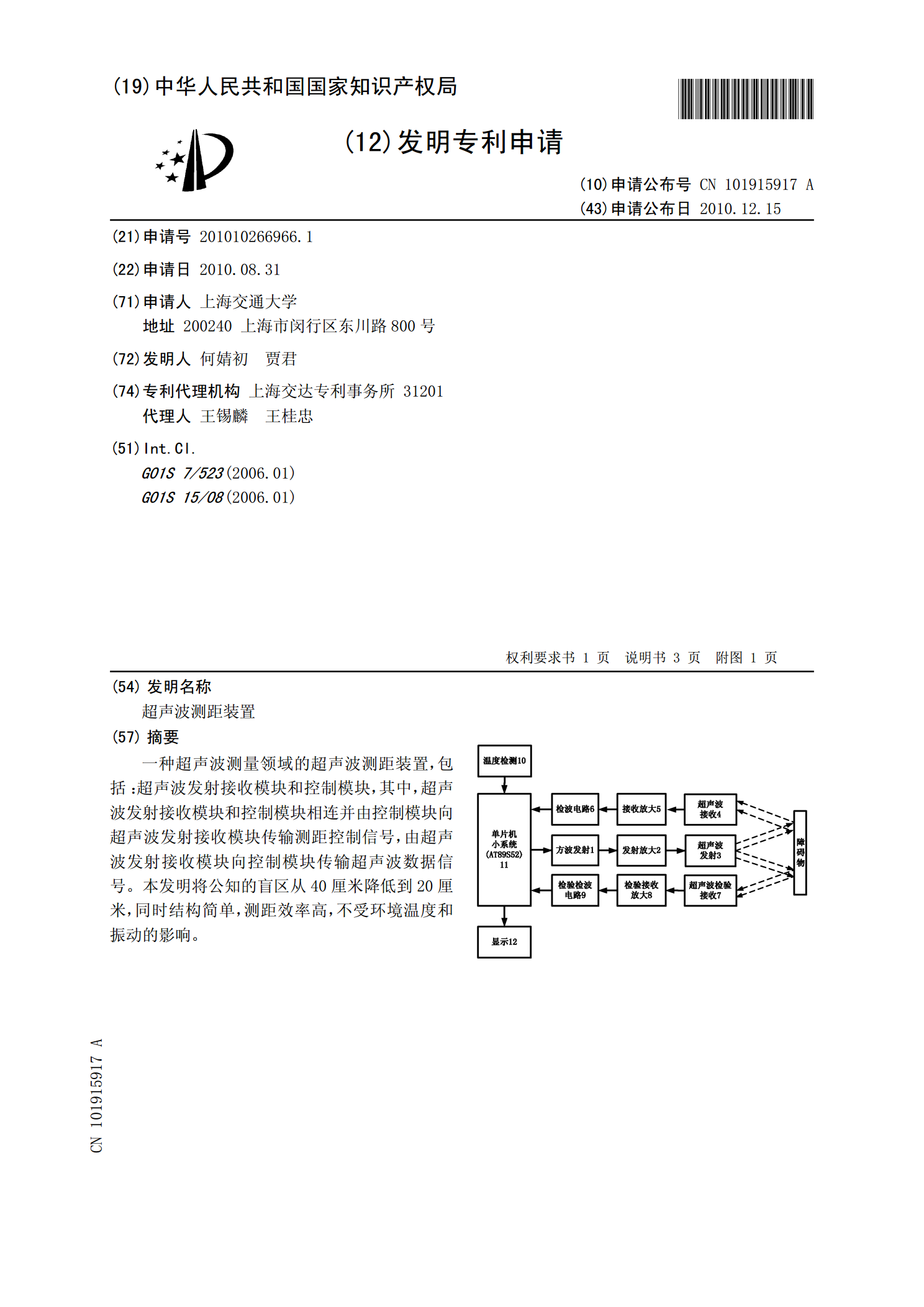
超声波测距装置.pdf
一种超声波测量领域的超声波测距装置,包括:超声波发射接收模块和控制模块,其中,超声波发射接收模块和控制模块相连并由控制模块向超声波发射接收模块传输测距控制信号,由超声波发射接收模块向控制模块传输超声波数据信号。本发明将公知的盲区从40厘米降低到20厘米,同时结构简单,测距效率高,不受环境温度和振动的影响。
超声波测距方法和装置.pdf
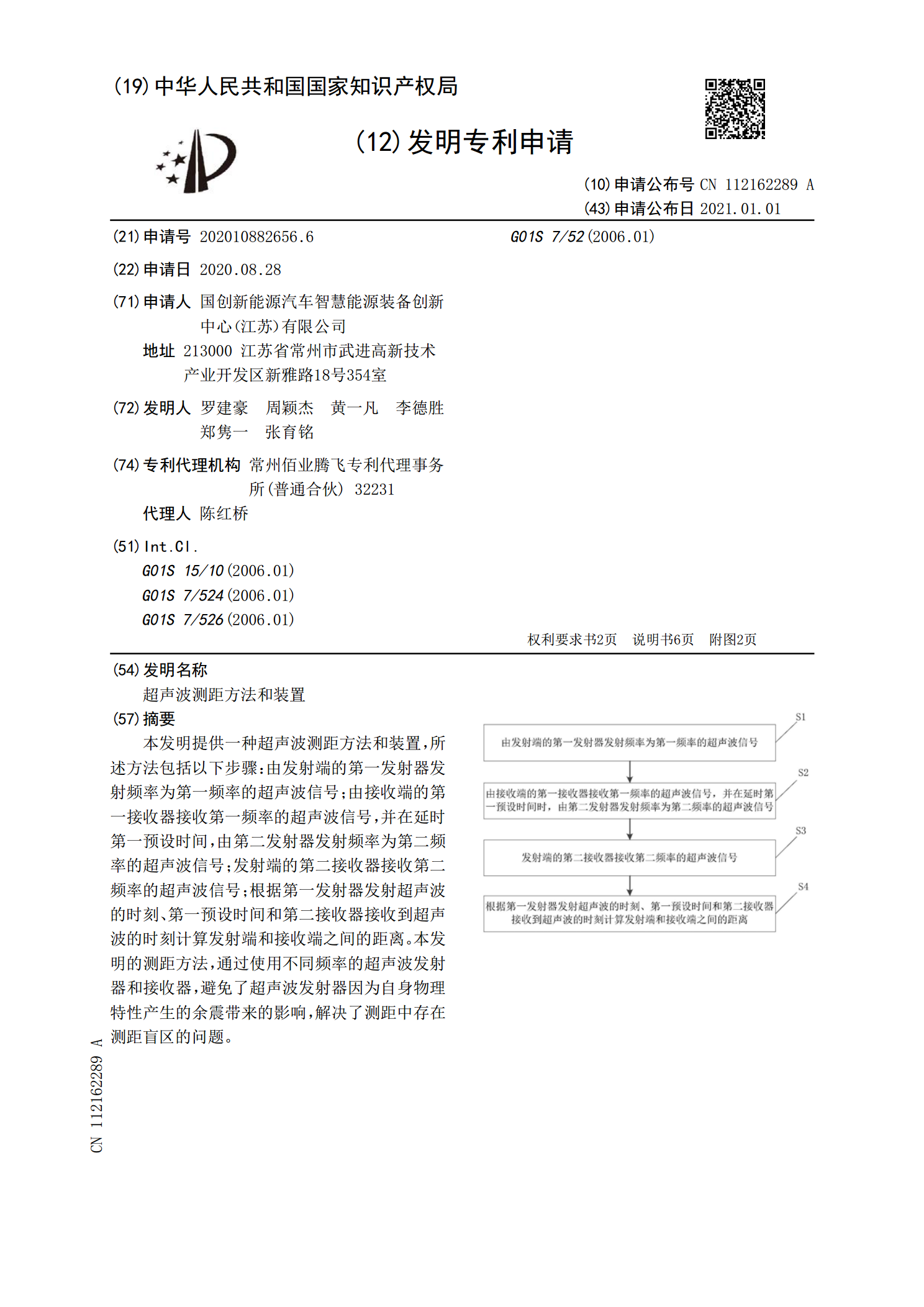
本发明提供一种超声波测距方法和装置,所述方法包括以下步骤:由发射端的第一发射器发射频率为第一频率的超声波信号;由接收端的第一接收器接收第一频率的超声波信号,并在延时第一预设时间,由第二发射器发射频率为第二频率的超声波信号;发射端的第二接收器接收第二频率的超声波信号;根据第一发射器发射超声波的时刻、第一预设时间和第二接收器接收到超声波的时刻计算发射端和接收端之间的距离。本发明的测距方法,通过使用不同频率的超声波发射器和接收器,避免了超声波发射器因为自身物理特性产生的余震带来的影响,解决了测距中存在测距盲区的
超声波测距方法及装置.pdf
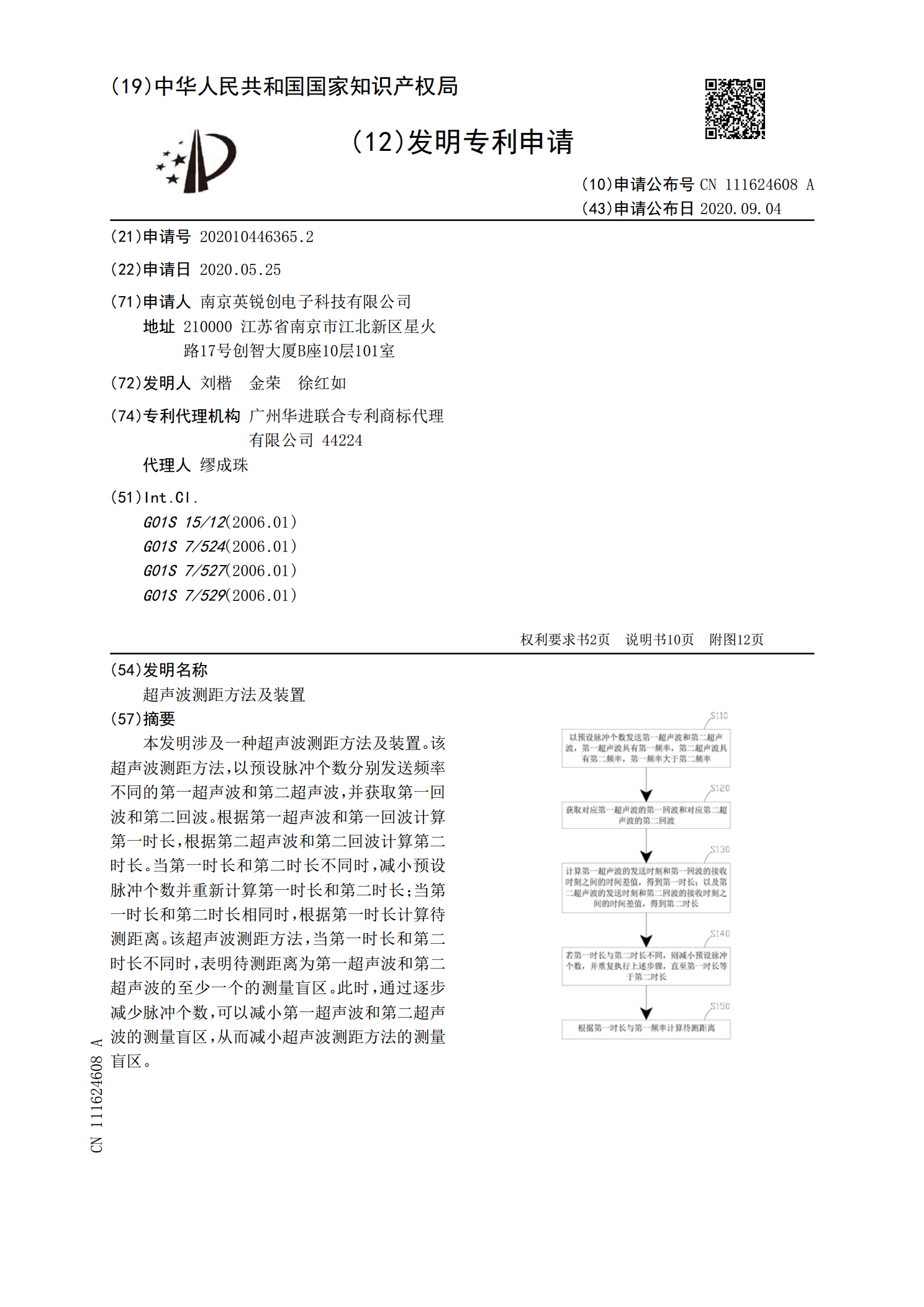
本发明涉及一种超声波测距方法及装置。该超声波测距方法,以预设脉冲个数分别发送频率不同的第一超声波和第二超声波,并获取第一回波和第二回波。根据第一超声波和第一回波计算第一时长,根据第二超声波和第二回波计算第二时长。当第一时长和第二时长不同时,减小预设脉冲个数并重新计算第一时长和第二时长;当第一时长和第二时长相同时,根据第一时长计算待测距离。该超声波测距方法,当第一时长和第二时长不同时,表明待测距离为第一超声波和第二超声波的至少一个的测量盲区。此时,通过逐步减少脉冲个数,可以减小第一超声波和第二超声波的测量盲