
一种基于旋转摄像头的大型车前方盲区检测系统.pdf

俊凤****bb

1/4
2/4
3/4
4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于旋转摄像头的大型车前方盲区检测系统.pdf
本发明涉及一种基于旋转摄像头的大型车前方盲区检测系统,其特征在于,包括:旋转摄像头,安装于大型车顶部前方,仅在大型车停止后开始工作,用于360度扫描大型车前下方的场景,在大型车行驶过程中,旋转摄像头停止工作;安装在大型车的驾驶室内的液晶显示装置,用于显示旋转摄像头拍摄到的视频影像。本发明和现有的盲区检测相比,安装方便,价格低廉。安装的旋转摄像头仅在汽车停止后开始工作,在车辆启动前,司机都可以观察到前方盲区的情况,由于时间短暂,司机也不会感觉到视觉疲劳。并且随着摄像头和液晶屏技术的发展,本发明的造价会更加便
一种无连续盲区的旋转摄像头.pdf
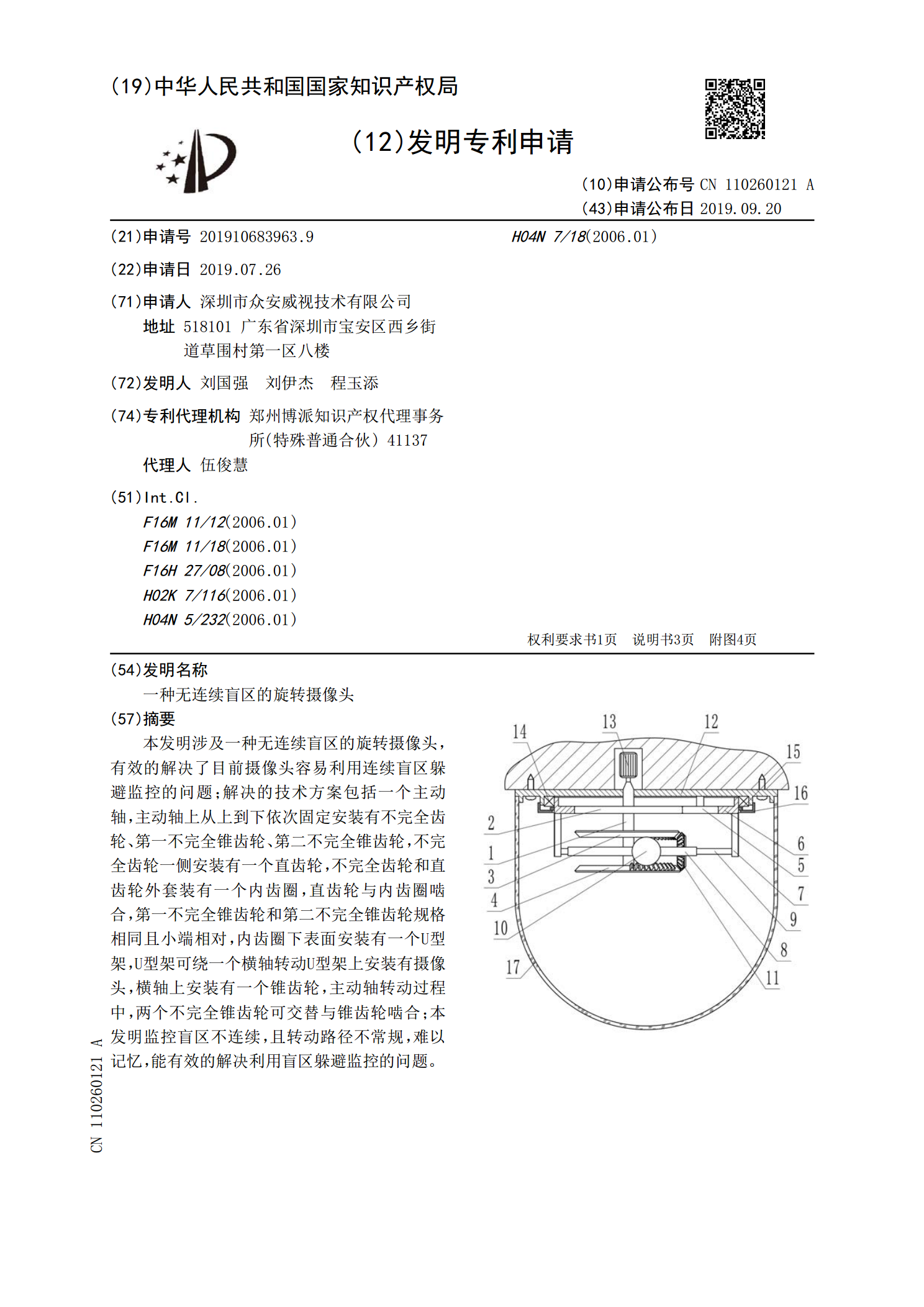
本发明涉及一种无连续盲区的旋转摄像头,有效的解决了目前摄像头容易利用连续盲区躲避监控的问题;解决的技术方案包括一个主动轴,主动轴上从上到下依次固定安装有不完全齿轮、第一不完全锥齿轮、第二不完全锥齿轮,不完全齿轮一侧安装有一个直齿轮,不完全齿轮和直齿轮外套装有一个内齿圈,直齿轮与内齿圈啮合,第一不完全锥齿轮和第二不完全锥齿轮规格相同且小端相对,内齿圈下表面安装有一个U型架,U型架可绕一个横轴转动U型架上安装有摄像头,横轴上安装有一个锥齿轮,主动轴转动过程中,两个不完全锥齿轮可交替与锥齿轮啮合;本发明监控盲区
一种大型沉井盲区旋转喷射取土方法及系统.pdf
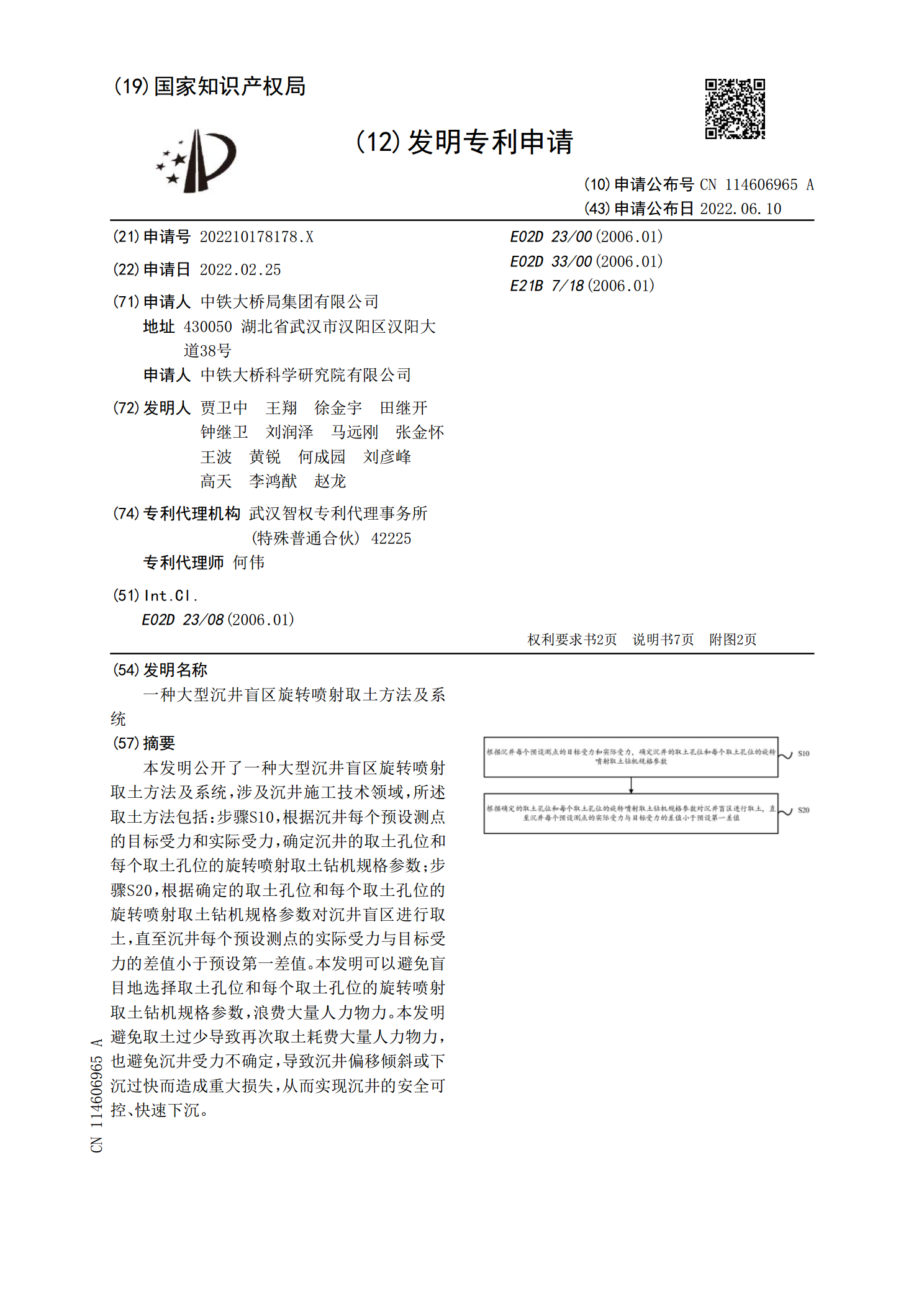
本发明公开了一种大型沉井盲区旋转喷射取土方法及系统,涉及沉井施工技术领域,所述取土方法包括:步骤S10,根据沉井每个预设测点的目标受力和实际受力,确定沉井的取土孔位和每个取土孔位的旋转喷射取土钻机规格参数;步骤S20,根据确定的取土孔位和每个取土孔位的旋转喷射取土钻机规格参数对沉井盲区进行取土,直至沉井每个预设测点的实际受力与目标受力的差值小于预设第一差值。本发明可以避免盲目地选择取土孔位和每个取土孔位的旋转喷射取土钻机规格参数,浪费大量人力物力。本发明避免取土过少导致再次取土耗费大量人力物力,也避免沉井
一种基于车辆盲区检测系统的汽车盲区检测方法.pdf
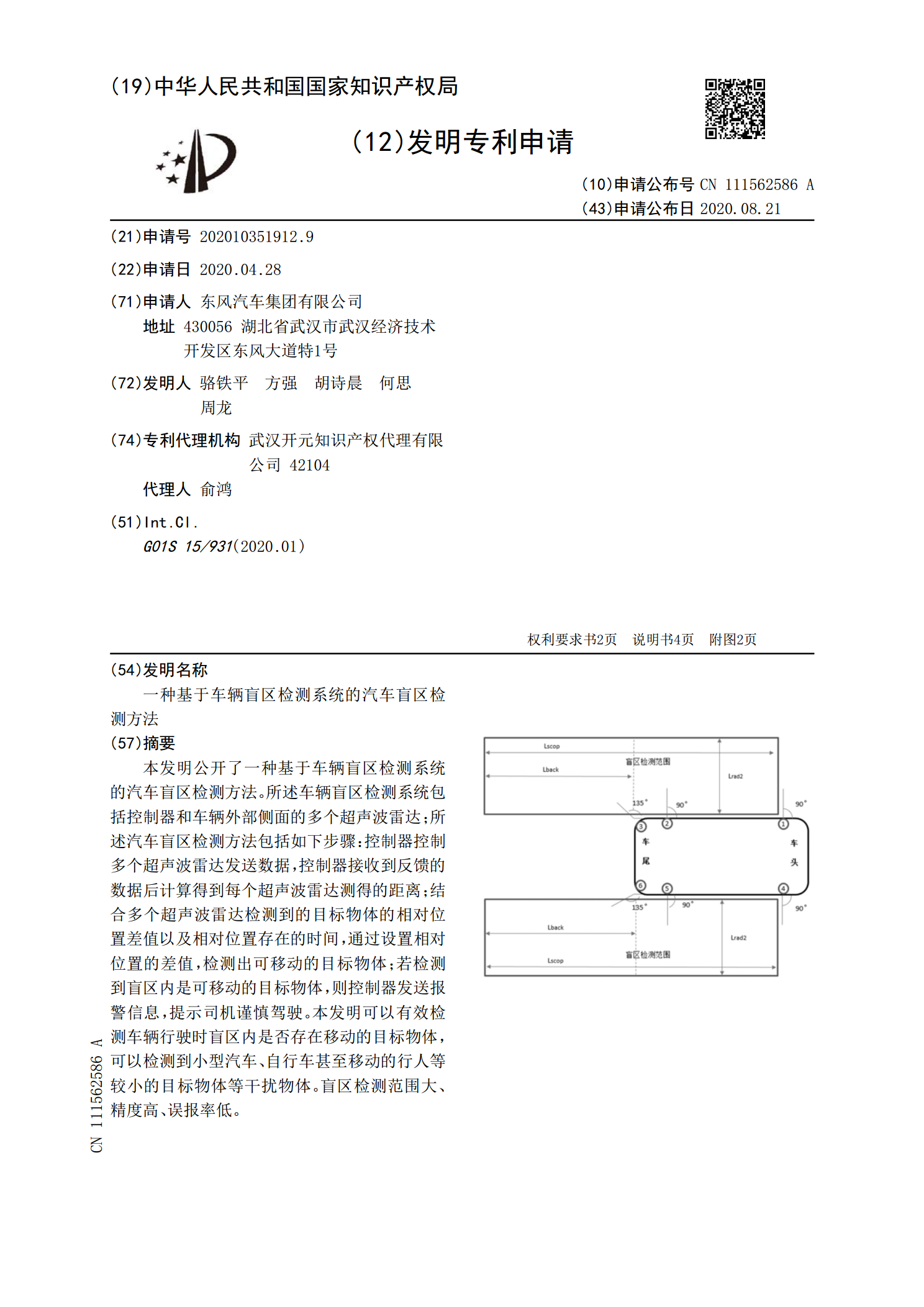
本发明公开了一种基于车辆盲区检测系统的汽车盲区检测方法。所述车辆盲区检测系统包括控制器和车辆外部侧面的多个超声波雷达;所述汽车盲区检测方法包括如下步骤:控制器控制多个超声波雷达发送数据,控制器接收到反馈的数据后计算得到每个超声波雷达测得的距离;结合多个超声波雷达检测到的目标物体的相对位置差值以及相对位置存在的时间,通过设置相对位置的差值,检测出可移动的目标物体;若检测到盲区内是可移动的目标物体,则控制器发送报警信息,提示司机谨慎驾驶。本发明可以有效检测车辆行驶时盲区内是否存在移动的目标物体,可以检测到小型
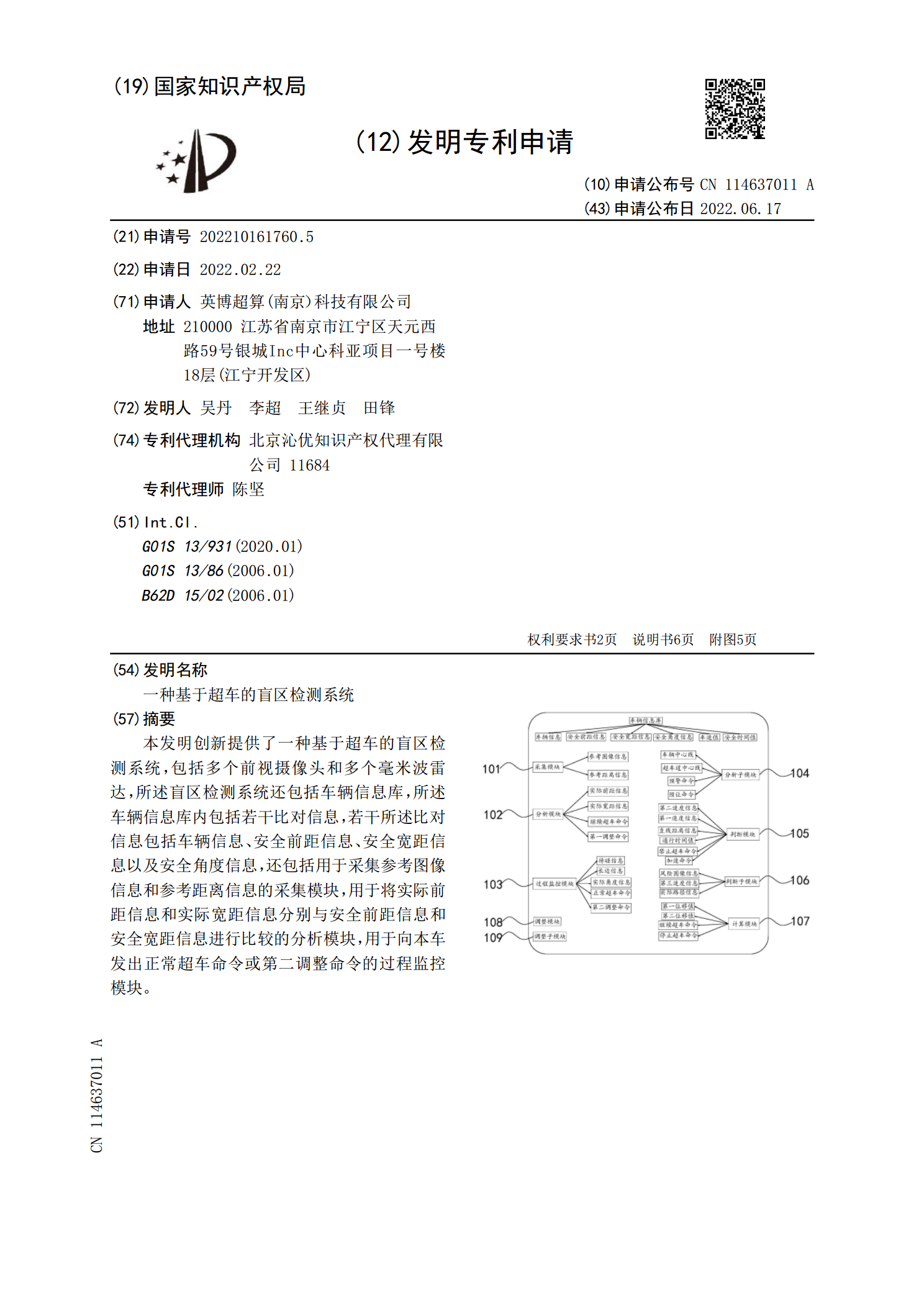
一种基于超车的盲区检测系统.pdf
本发明创新提供了一种基于超车的盲区检测系统,包括多个前视摄像头和多个毫米波雷达,所述盲区检测系统还包括车辆信息库,所述车辆信息库内包括若干比对信息,若干所述比对信息包括车辆信息、安全前距信息、安全宽距信息以及安全角度信息,还包括用于采集参考图像信息和参考距离信息的采集模块,用于将实际前距信息和实际宽距信息分别与安全前距信息和安全宽距信息进行比较的分析模块,用于向本车发出正常超车命令或第二调整命令的过程监控模块。