
一种基于无人机的共享导盲机器人及其工作方法.pdf

森林****io


1/10
2/10

3/10

4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于无人机的共享导盲机器人及其工作方法.pdf
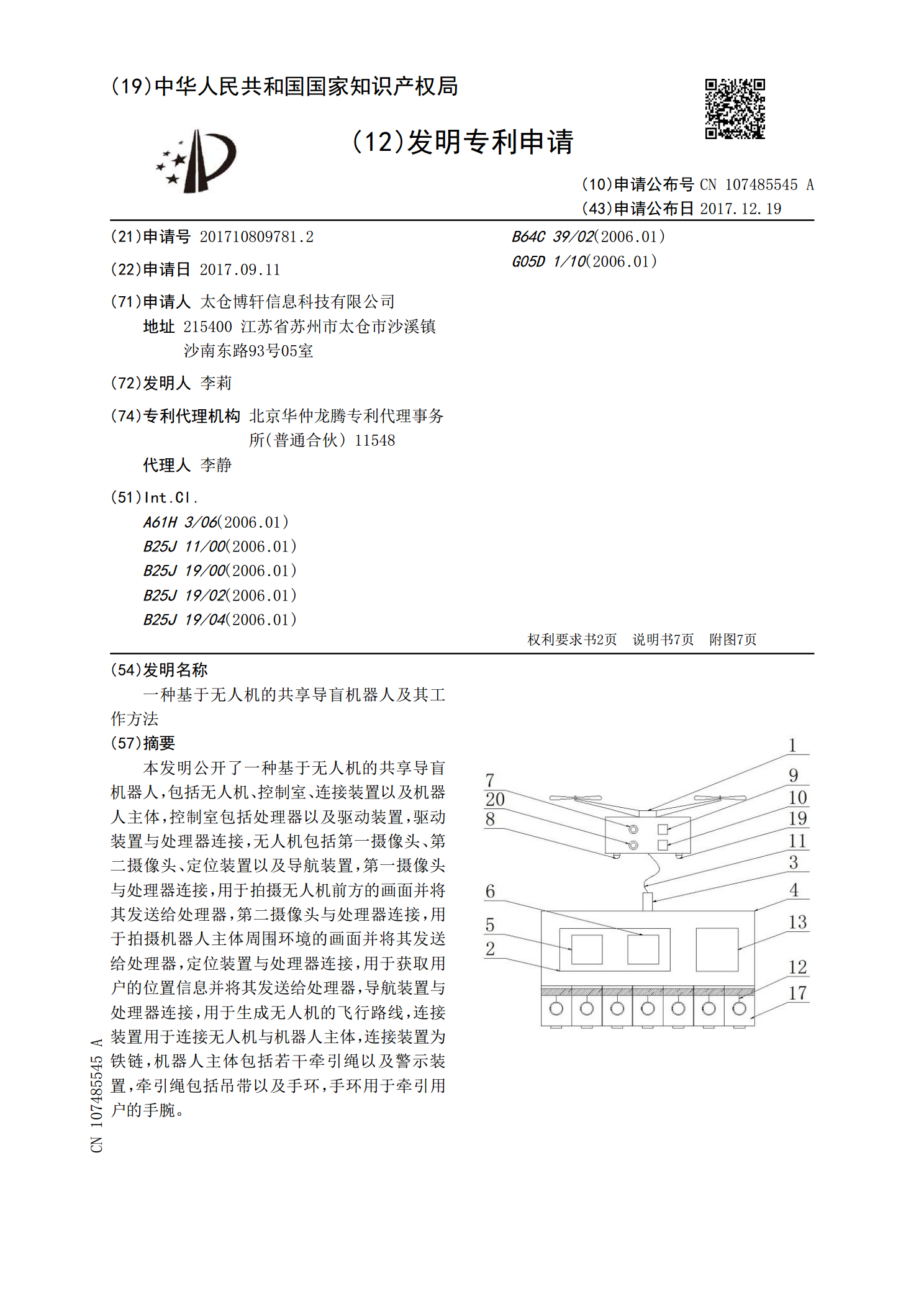
本发明公开了一种基于无人机的共享导盲机器人,包括无人机、控制室、连接装置以及机器人主体,控制室包括处理器以及驱动装置,驱动装置与处理器连接,无人机包括第一摄像头、第二摄像头、定位装置以及导航装置,第一摄像头与处理器连接,用于拍摄无人机前方的画面并将其发送给处理器,第二摄像头与处理器连接,用于拍摄机器人主体周围环境的画面并将其发送给处理器,定位装置与处理器连接,用于获取用户的位置信息并将其发送给处理器,导航装置与处理器连接,用于生成无人机的飞行路线,连接装置用于连接无人机与机器人主体,连接装置为铁链,机器人
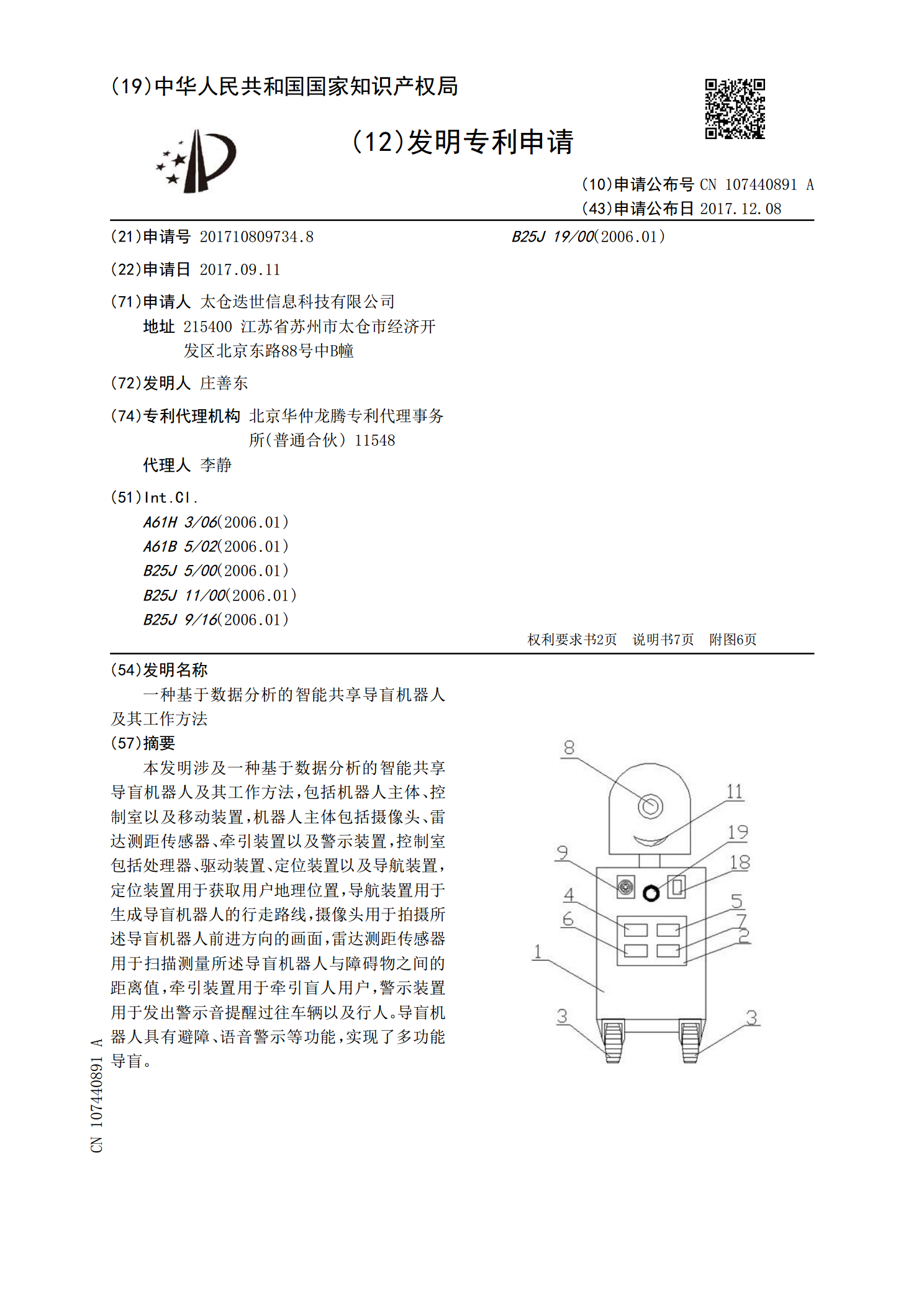
一种基于数据分析的智能共享导盲机器人及其工作方法.pdf
本发明涉及一种基于数据分析的智能共享导盲机器人及其工作方法,包括机器人主体、控制室以及移动装置,机器人主体包括摄像头、雷达测距传感器、牵引装置以及警示装置,控制室包括处理器、驱动装置、定位装置以及导航装置,定位装置用于获取用户地理位置,导航装置用于生成导盲机器人的行走路线,摄像头用于拍摄所述导盲机器人前进方向的画面,雷达测距传感器用于扫描测量所述导盲机器人与障碍物之间的距离值,牵引装置用于牵引盲人用户,警示装置用于发出警示音提醒过往车辆以及行人。导盲机器人具有避障、语音警示等功能,实现了多功能导盲。

一种基于触觉反馈的智能导盲机器人及其工作方法.pdf
本发明公开了一种基于触觉反馈的智能导盲机器人,机器人主体包括控制机构、第一充气装置、第二充气装置以及第三充气装置,控制机构包括处理器以及驱动装置,驱动装置与处理器连接,驱动装置分别与第一充气装置、第二充气装置、第三充气装置连接,固定装置包括第一吊带以及第二吊带,第一吊带包括第一固定环,第一固定环内设置有第一气囊,第一气囊与第一吊带内的第一空气导管连通,第一空气导管与机器人主体内的第一充气装置连接,第一充气装置与驱动装置连接,第二吊带包括第二固定环,第二固定环内设置有第二气囊,第二气囊与第二吊带内的第二空气
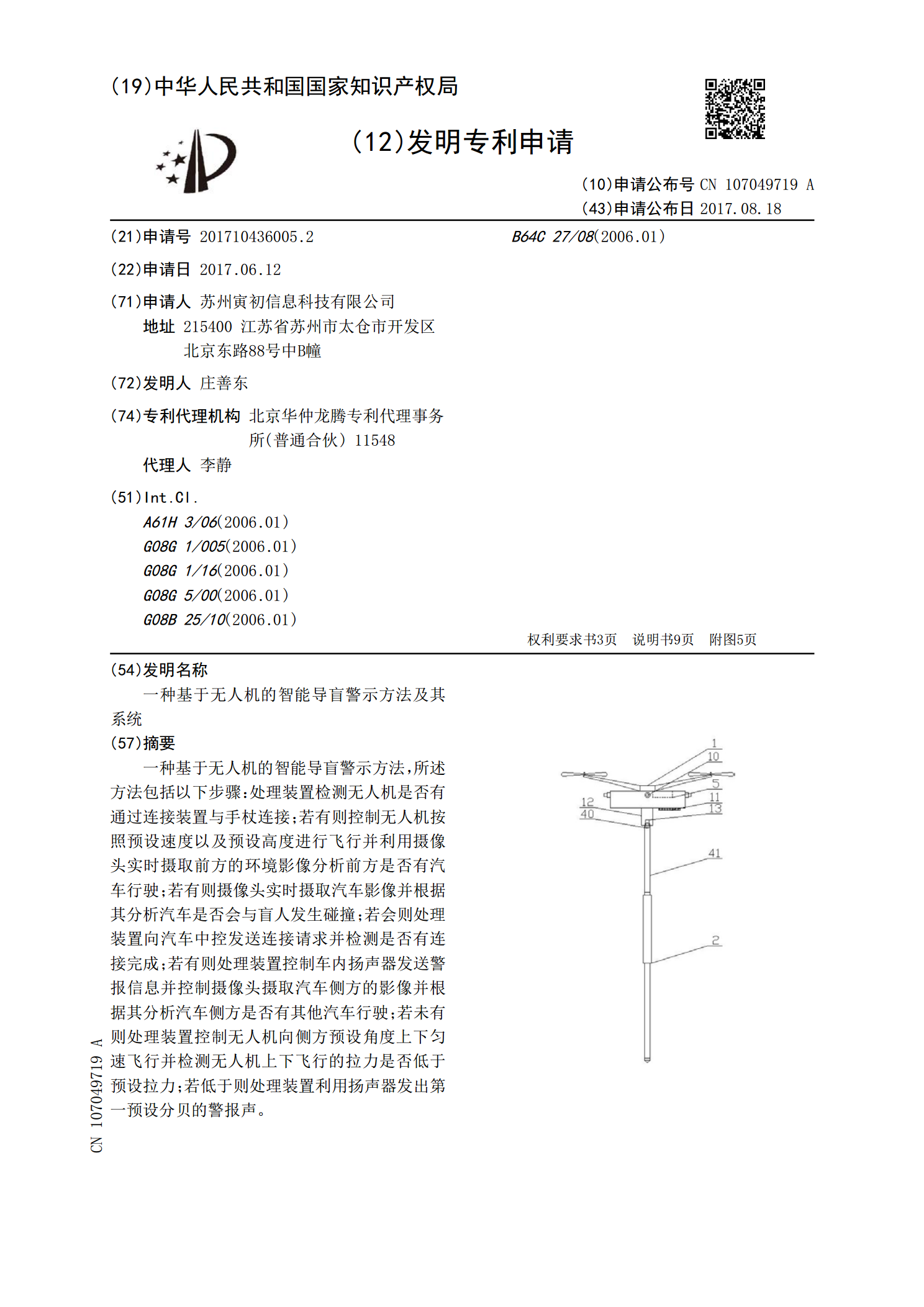
一种基于无人机的智能导盲警示方法及其系统.pdf
一种基于无人机的智能导盲警示方法,所述方法包括以下步骤:处理装置检测无人机是否有通过连接装置与手杖连接;若有则控制无人机按照预设速度以及预设高度进行飞行并利用摄像头实时摄取前方的环境影像分析前方是否有汽车行驶;若有则摄像头实时摄取汽车影像并根据其分析汽车是否会与盲人发生碰撞;若会则处理装置向汽车中控发送连接请求并检测是否有连接完成;若有则处理装置控制车内扬声器发送警报信息并控制摄像头摄取汽车侧方的影像并根据其分析汽车侧方是否有其他汽车行驶;若未有则处理装置控制无人机向侧方预设角度上下匀速飞行并检测无人机上
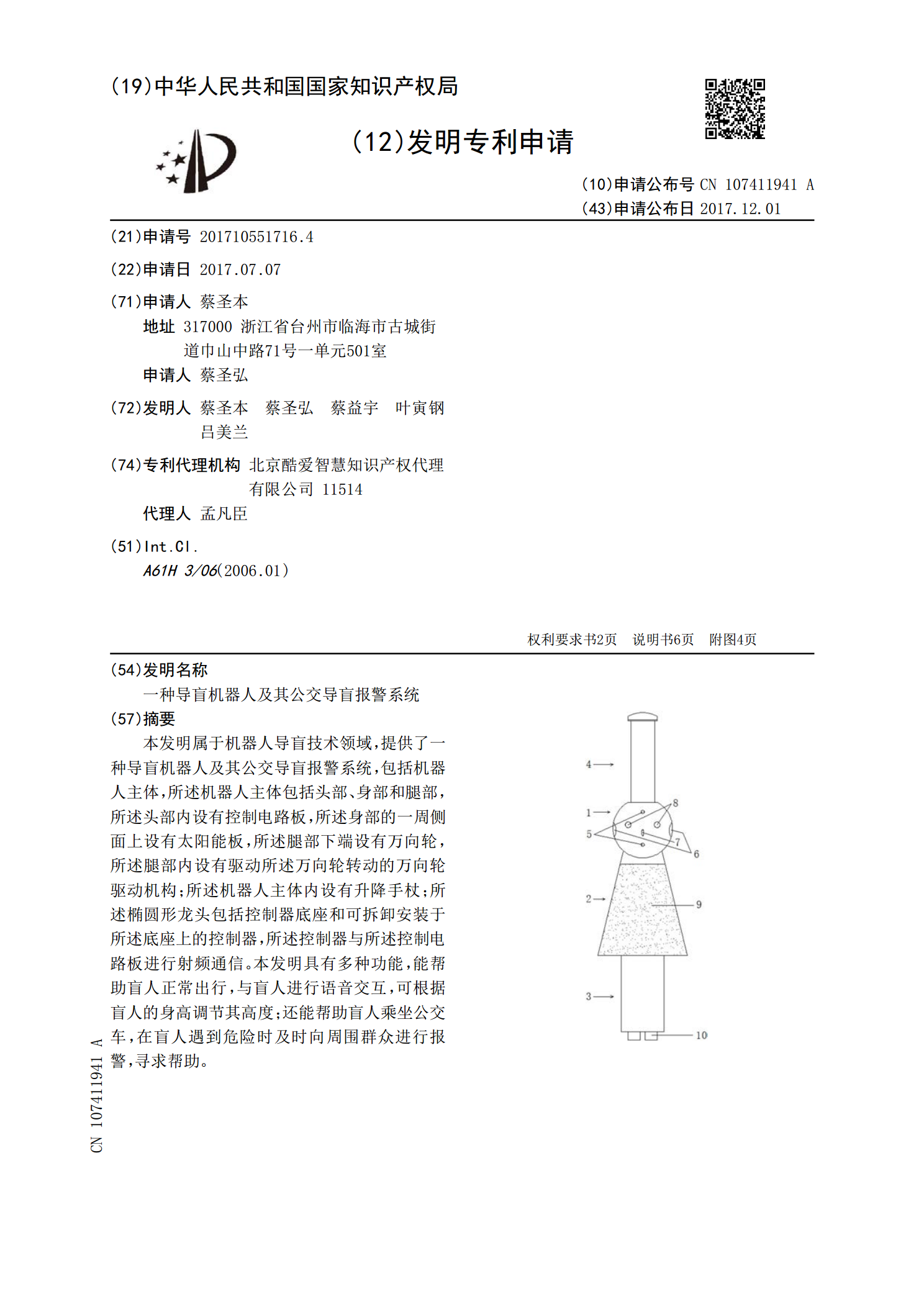
一种导盲机器人及其公交导盲报警系统.pdf
本发明属于机器人导盲技术领域,提供了一种导盲机器人及其公交导盲报警系统,包括机器人主体,所述机器人主体包括头部、身部和腿部,所述头部内设有控制电路板,所述身部的一周侧面上设有太阳能板,所述腿部下端设有万向轮,所述腿部内设有驱动所述万向轮转动的万向轮驱动机构;所述机器人主体内设有升降手杖;所述椭圆形龙头包括控制器底座和可拆卸安装于所述底座上的控制器,所述控制器与所述控制电路板进行射频通信。本发明具有多种功能,能帮助盲人正常出行,与盲人进行语音交互,可根据盲人的身高调节其高度;还能帮助盲人乘坐公交车,在盲人遇