
一种基于智能终端的导航方法及导航系统.pdf

一条****杉淑

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于智能终端的导航方法及导航系统.pdf
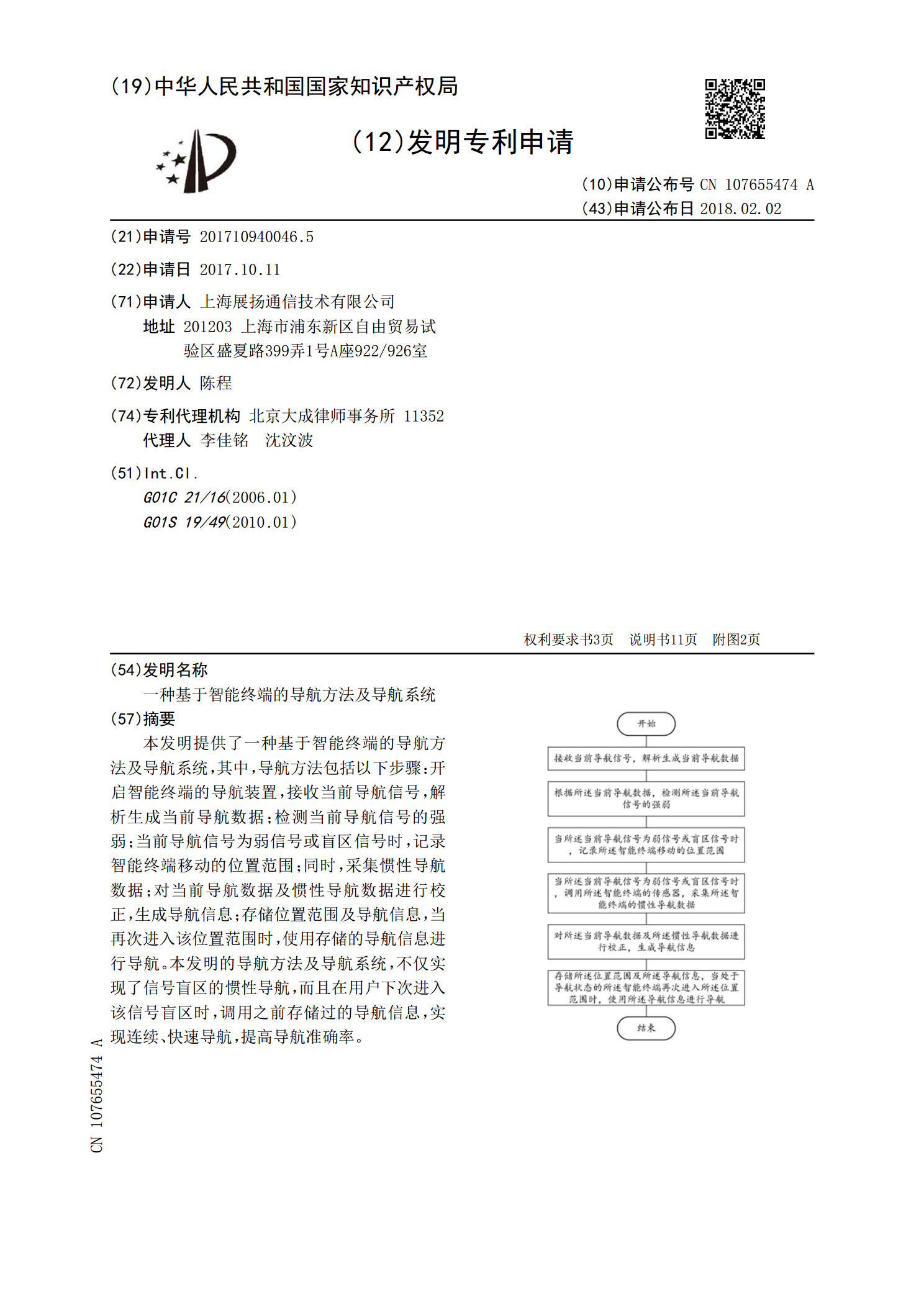
本发明提供了一种基于智能终端的导航方法及导航系统,其中,导航方法包括以下步骤:开启智能终端的导航装置,接收当前导航信号,解析生成当前导航数据;检测当前导航信号的强弱;当前导航信号为弱信号或盲区信号时,记录智能终端移动的位置范围;同时,采集惯性导航数据;对当前导航数据及惯性导航数据进行校正,生成导航信息;存储位置范围及导航信息,当再次进入该位置范围时,使用存储的导航信息进行导航。本发明的导航方法及导航系统,不仅实现了信号盲区的惯性导航,而且在用户下次进入该信号盲区时,调用之前存储过的导航信息,实现连续、快速
一种盲人出行智能导航系统及方法.pdf
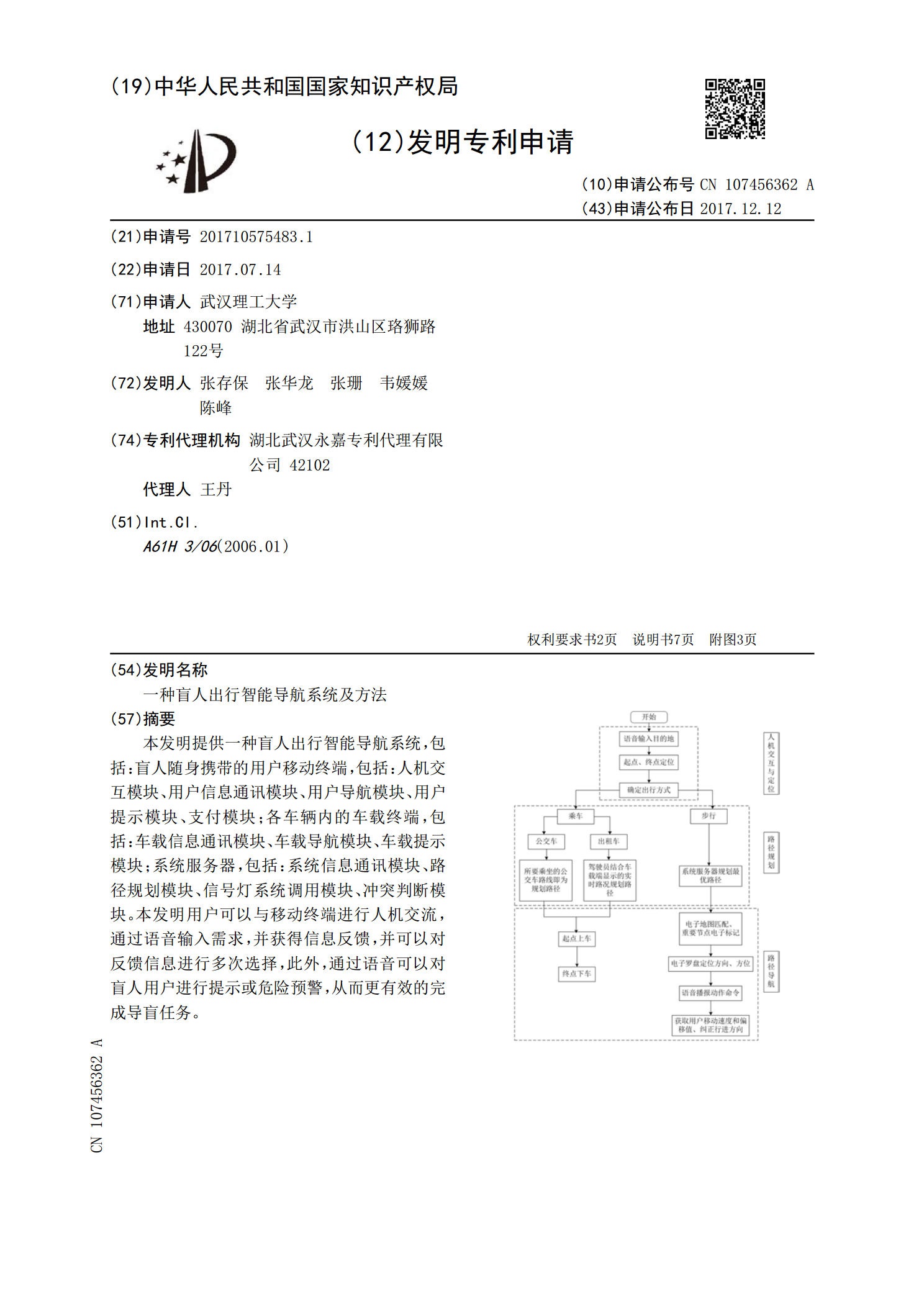
本发明提供一种盲人出行智能导航系统,包括:盲人随身携带的用户移动终端,包括:人机交互模块、用户信息通讯模块、用户导航模块、用户提示模块、支付模块;各车辆内的车载终端,包括:车载信息通讯模块、车载导航模块、车载提示模块;系统服务器,包括:系统信息通讯模块、路径规划模块、信号灯系统调用模块、冲突判断模块。本发明用户可以与移动终端进行人机交流,通过语音输入需求,并获得信息反馈,并可以对反馈信息进行多次选择,此外,通过语音可以对盲人用户进行提示或危险预警,从而更有效的完成导盲任务。
一种基于北斗导航的语音智能终端.pdf
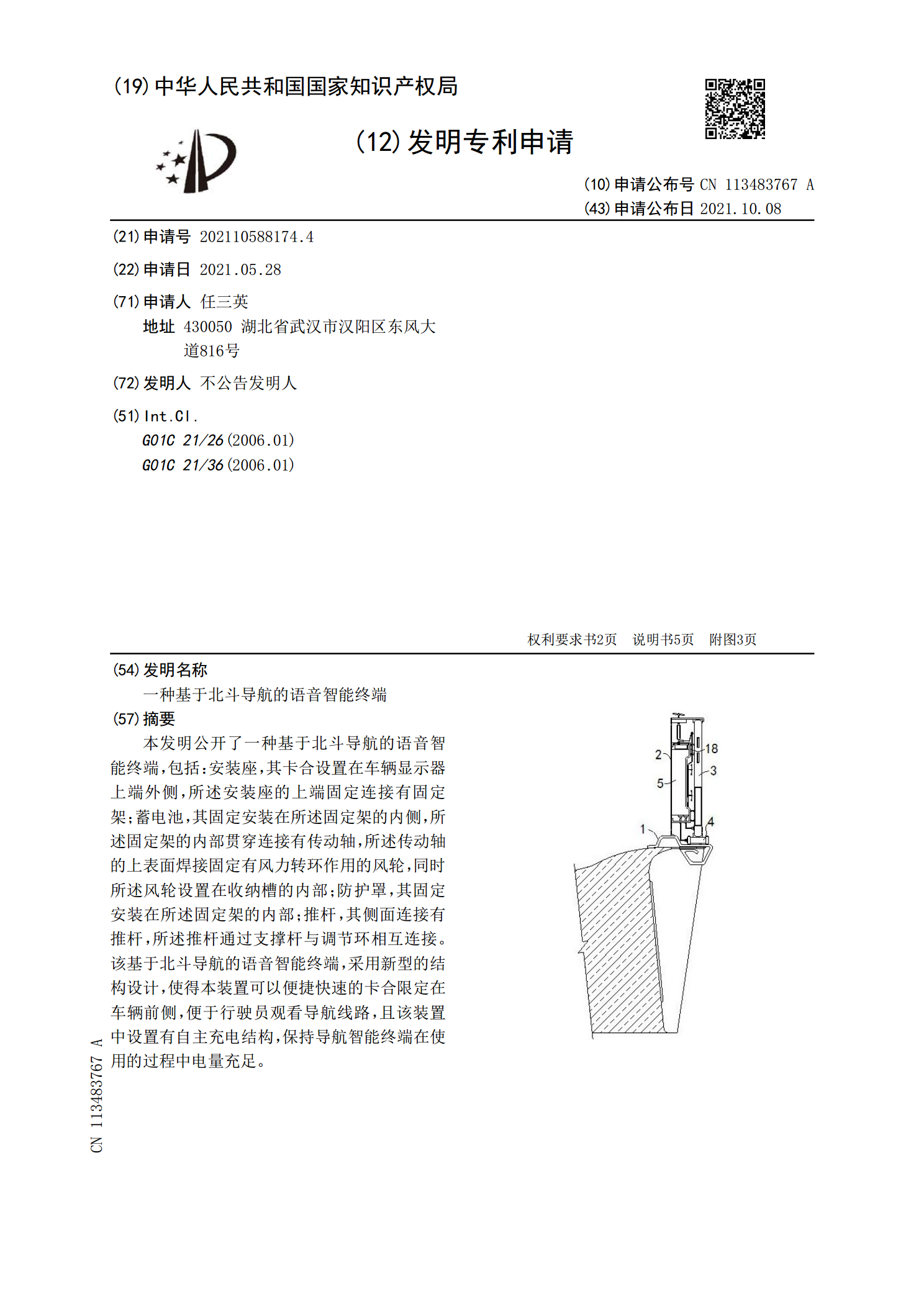
本发明公开了一种基于北斗导航的语音智能终端,包括:安装座,其卡合设置在车辆显示器上端外侧,所述安装座的上端固定连接有固定架;蓄电池,其固定安装在所述固定架的内侧,所述固定架的内部贯穿连接有传动轴,所述传动轴的上表面焊接固定有风力转环作用的风轮,同时所述风轮设置在收纳槽的内部;防护罩,其固定安装在所述固定架的内部;推杆,其侧面连接有推杆,所述推杆通过支撑杆与调节环相互连接。该基于北斗导航的语音智能终端,采用新型的结构设计,使得本装置可以便捷快速的卡合限定在车辆前侧,便于行驶员观看导航线路,且该装置中设置有自

导航数据共享方法、车载装置、移动终端及移动终端导航系统.pdf
本发明提供一种导航数据共享方法和车载装置及移动终端、移动终端导航系统。本发明提供的方法包括:收集从车载全球卫星导航系统接收机所获取的车载全球卫星导航系统数据;以及发送该车载全球卫星导航系统数据到移动终端。此外,本发明提供一种移动终端执行的方法,该方法包括:从车载装置接收车载全球卫星导航系统数据;以及根据该车载全球卫星导航系统数据,进行移动终端导航。本发明能提高移动终端在汽车行驶时的导航表现,并减少因导航错误所带来的交通意外。
导航数据共享方法、车载装置、移动终端及移动终端导航系统.pdf
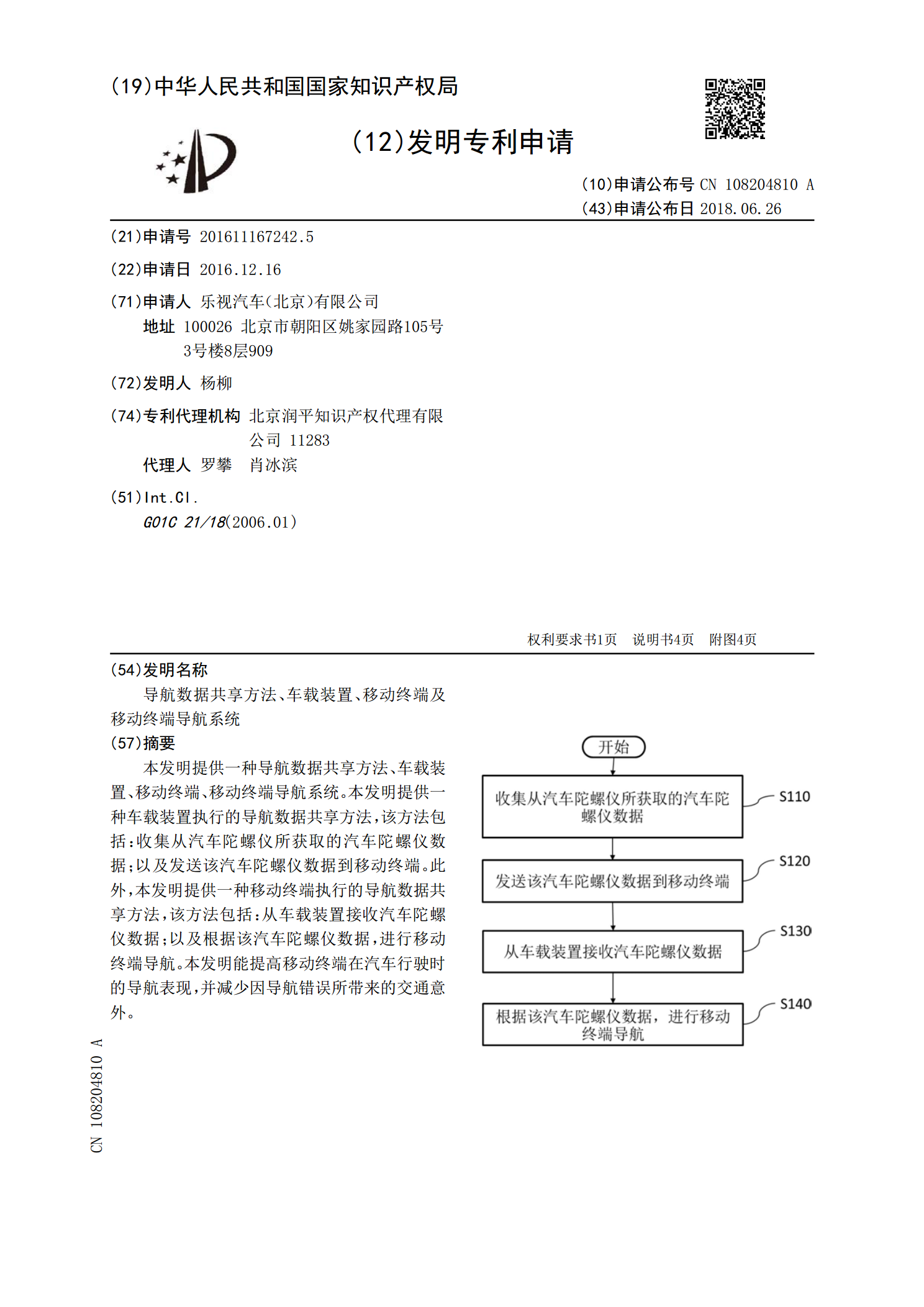
本发明提供一种导航数据共享方法、车载装置、移动终端、移动终端导航系统。本发明提供一种车载装置执行的导航数据共享方法,该方法包括:收集从汽车陀螺仪所获取的汽车陀螺仪数据;以及发送该汽车陀螺仪数据到移动终端。此外,本发明提供一种移动终端执行的导航数据共享方法,该方法包括:从车载装置接收汽车陀螺仪数据;以及根据该汽车陀螺仪数据,进行移动终端导航。本发明能提高移动终端在汽车行驶时的导航表现,并减少因导航错误所带来的交通意外。