
车底盲区探测系统、车底盲区探测方法和车辆启动方法.pdf

白真****ng


1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车底盲区探测系统、车底盲区探测方法和车辆启动方法.pdf
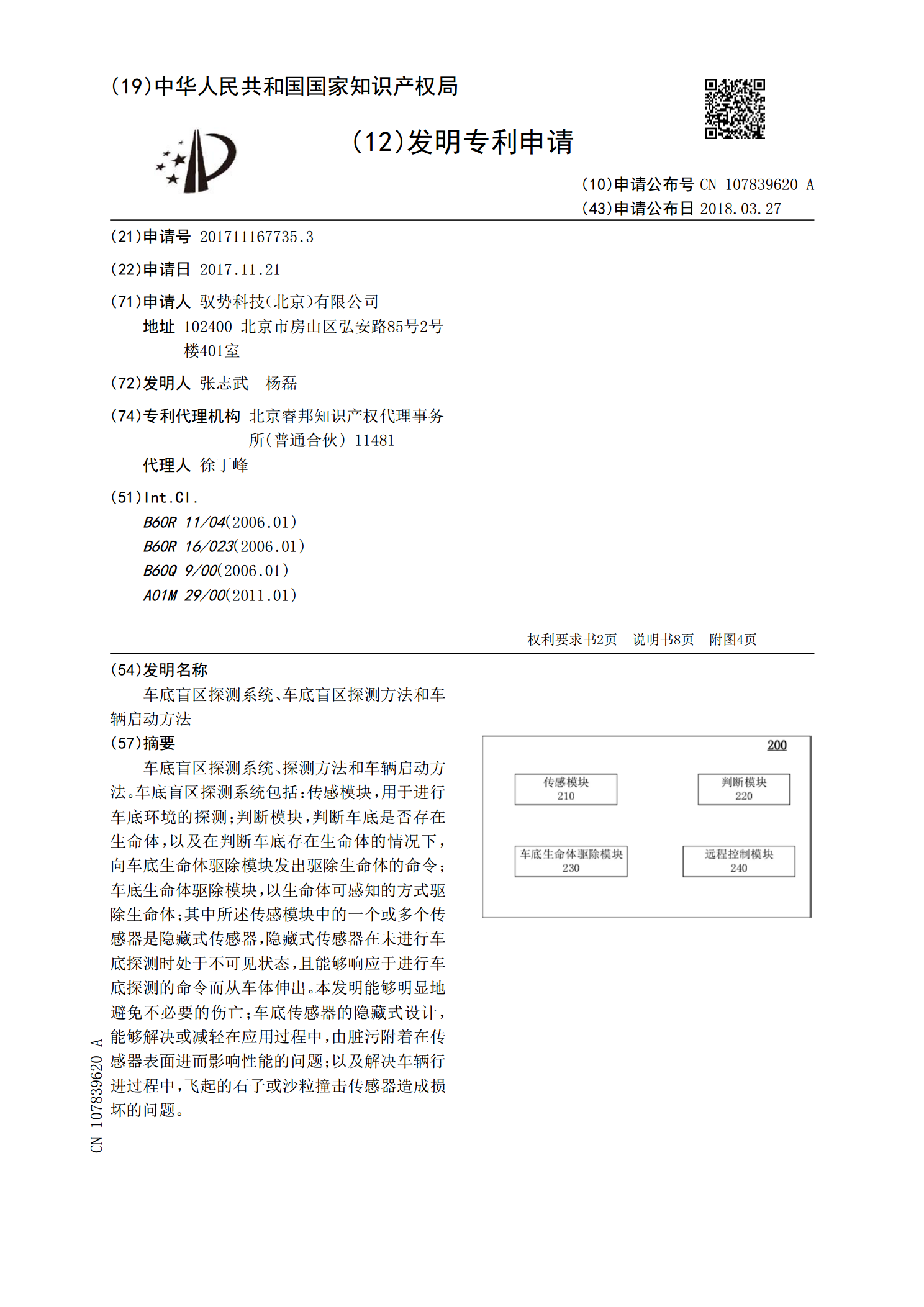
车底盲区探测系统、探测方法和车辆启动方法。车底盲区探测系统包括:传感模块,用于进行车底环境的探测;判断模块,判断车底是否存在生命体,以及在判断车底存在生命体的情况下,向车底生命体驱除模块发出驱除生命体的命令;车底生命体驱除模块,以生命体可感知的方式驱除生命体;其中所述传感模块中的一个或多个传感器是隐藏式传感器,隐藏式传感器在未进行车底探测时处于不可见状态,且能够响应于进行车底探测的命令而从车体伸出。本发明能够明显地避免不必要的伤亡;车底传感器的隐藏式设计,能够解决或减轻在应用过程中,由脏污附着在传感器表面

车辆后视镜盲区探测系统及方法.pdf
本发明公开了一种车辆后视镜盲区探测系统,包括能够产生探测信号的多个超声波探头,用于探测在车辆一侧的盲区出现的障碍物;所述多个超声波探头沿车辆的前行方向彼此间隔开地布置在所述车辆上,使得所述多个超声波探头的总探测范围能够至少部分地覆盖所述车辆一侧的所述盲区;以及盲区探测控制单元,配置成接收所述探测信号并根据所述多个超声波探头中至少两个超声波探头探测到障碍物的时间顺序来确定所述障碍物进入所述盲区的方向。在减少误报警次数的同时能够有效的对后视镜盲区内存在的车辆进行报警,以提高驾驶安全性。
一种填充车底盲区的方法和系统.pdf
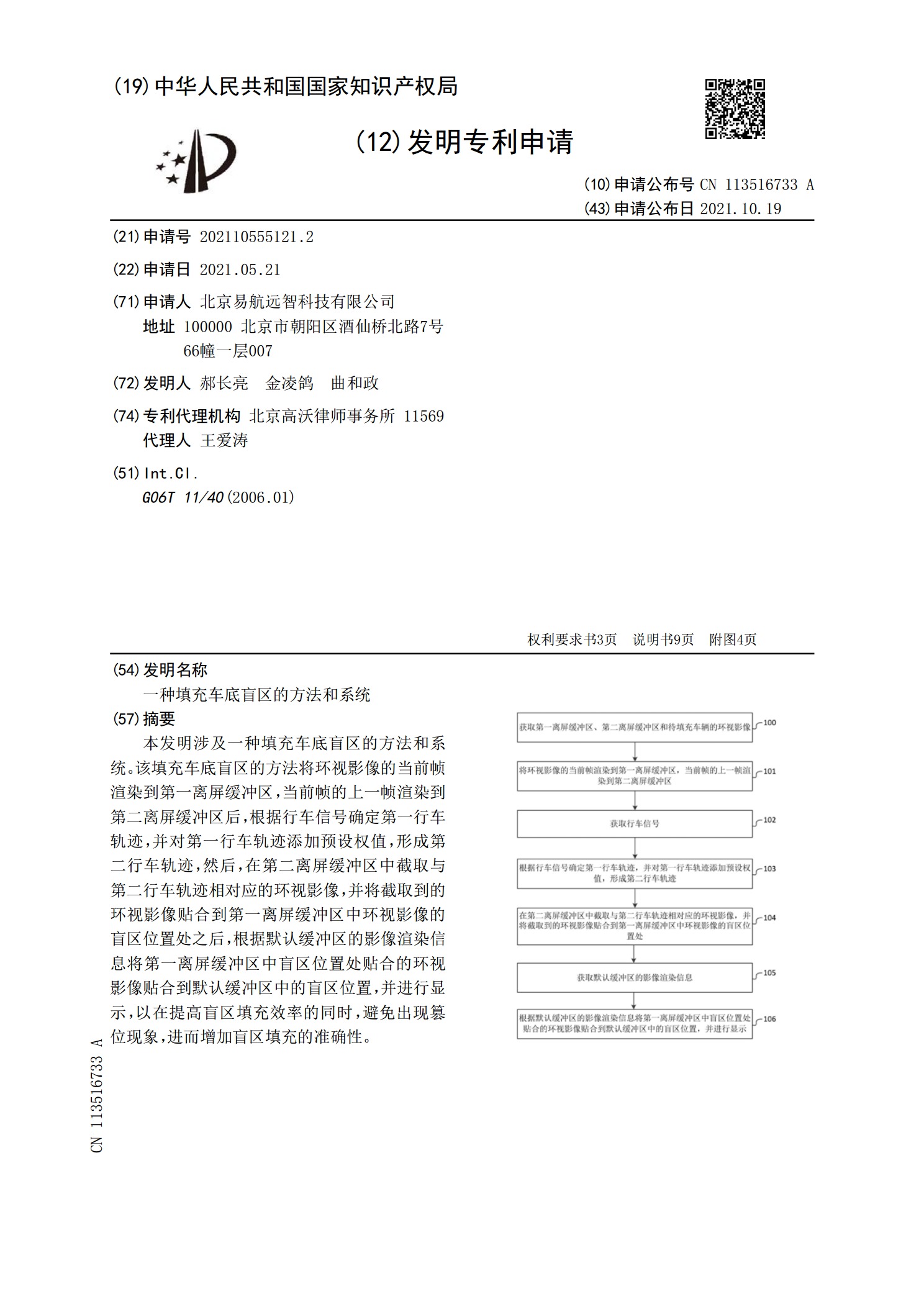
本发明涉及一种填充车底盲区的方法和系统。该填充车底盲区的方法将环视影像的当前帧渲染到第一离屏缓冲区,当前帧的上一帧渲染到第二离屏缓冲区后,根据行车信号确定第一行车轨迹,并对第一行车轨迹添加预设权值,形成第二行车轨迹,然后,在第二离屏缓冲区中截取与第二行车轨迹相对应的环视影像,并将截取到的环视影像贴合到第一离屏缓冲区中环视影像的盲区位置处之后,根据默认缓冲区的影像渲染信息将第一离屏缓冲区中盲区位置处贴合的环视影像贴合到默认缓冲区中的盲区位置,并进行显示,以在提高盲区填充效率的同时,避免出现篡位现象,进而增加
内轮差盲区探测系统及其货车盲区监测方法.pdf
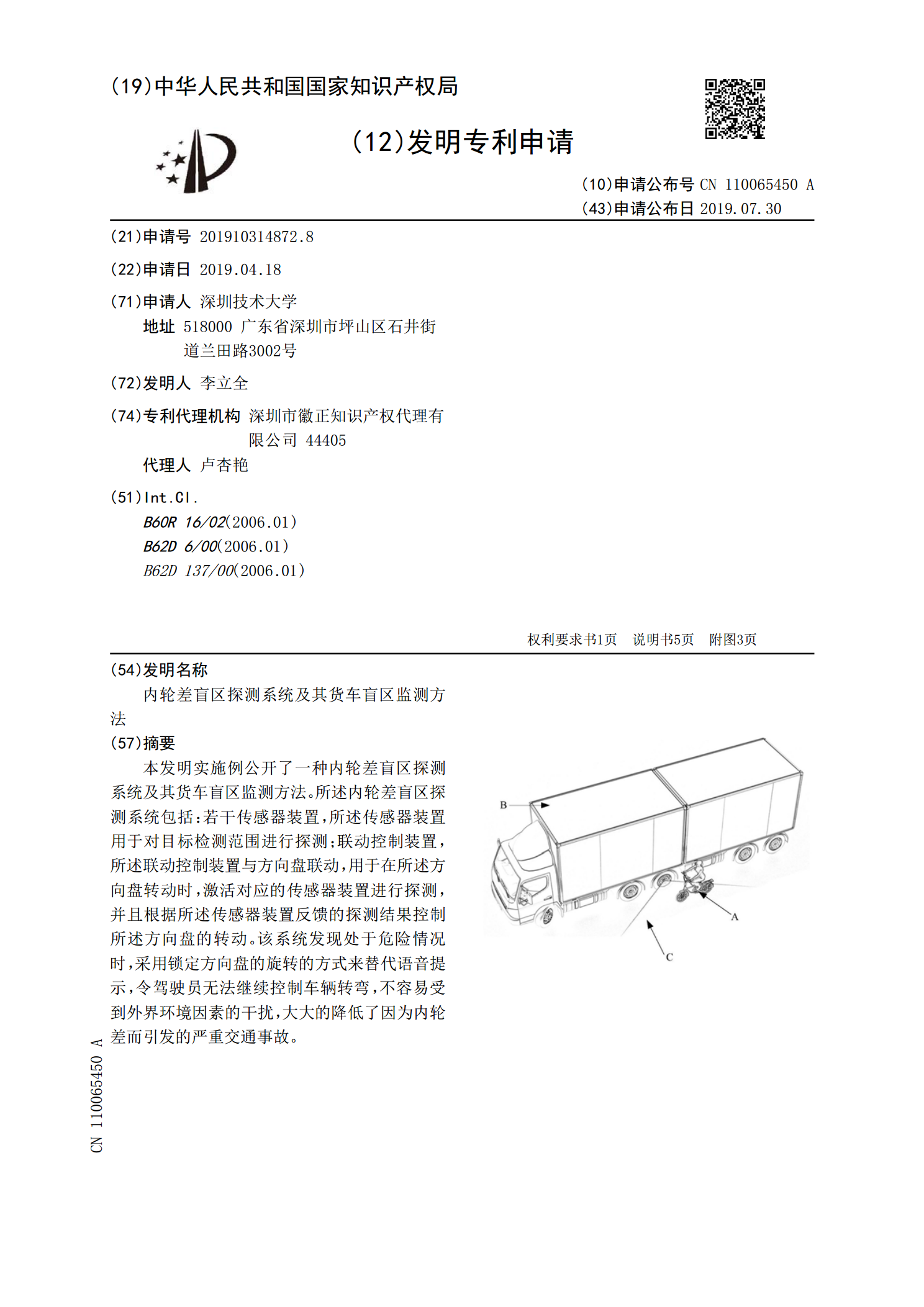
本发明实施例公开了一种内轮差盲区探测系统及其货车盲区监测方法。所述内轮差盲区探测系统包括:若干传感器装置,所述传感器装置用于对目标检测范围进行探测;联动控制装置,所述联动控制装置与方向盘联动,用于在所述方向盘转动时,激活对应的传感器装置进行探测,并且根据所述传感器装置反馈的探测结果控制所述方向盘的转动。该系统发现处于危险情况时,采用锁定方向盘的旋转的方式来替代语音提示,令驾驶员无法继续控制车辆转弯,不容易受到外界环境因素的干扰,大大的降低了因为内轮差而引发的严重交通事故。
车载盲区探测系统.pdf
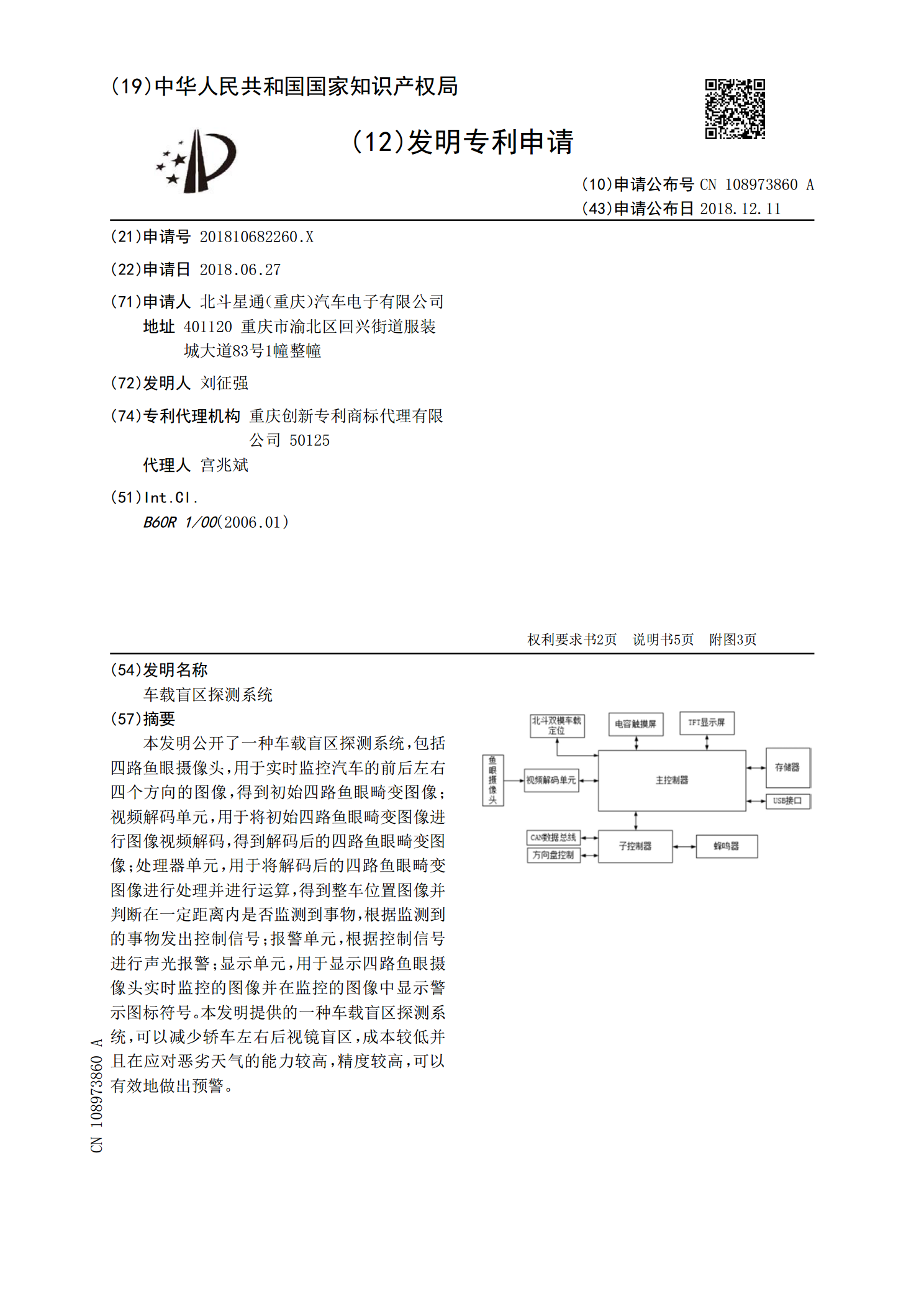
本发明公开了一种车载盲区探测系统,包括四路鱼眼摄像头,用于实时监控汽车的前后左右四个方向的图像,得到初始四路鱼眼畸变图像;视频解码单元,用于将初始四路鱼眼畸变图像进行图像视频解码,得到解码后的四路鱼眼畸变图像;处理器单元,用于将解码后的四路鱼眼畸变图像进行处理并进行运算,得到整车位置图像并判断在一定距离内是否监测到事物,根据监测到的事物发出控制信号;报警单元,根据控制信号进行声光报警;显示单元,用于显示四路鱼眼摄像头实时监控的图像并在监控的图像中显示警示图标符号。本发明提供的一种车载盲区探测系统,可以减少