
一种填充车底盲区的方法和系统.pdf

努力****绮亦

1/10
2/10
3/10

4/10
5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种填充车底盲区的方法和系统.pdf
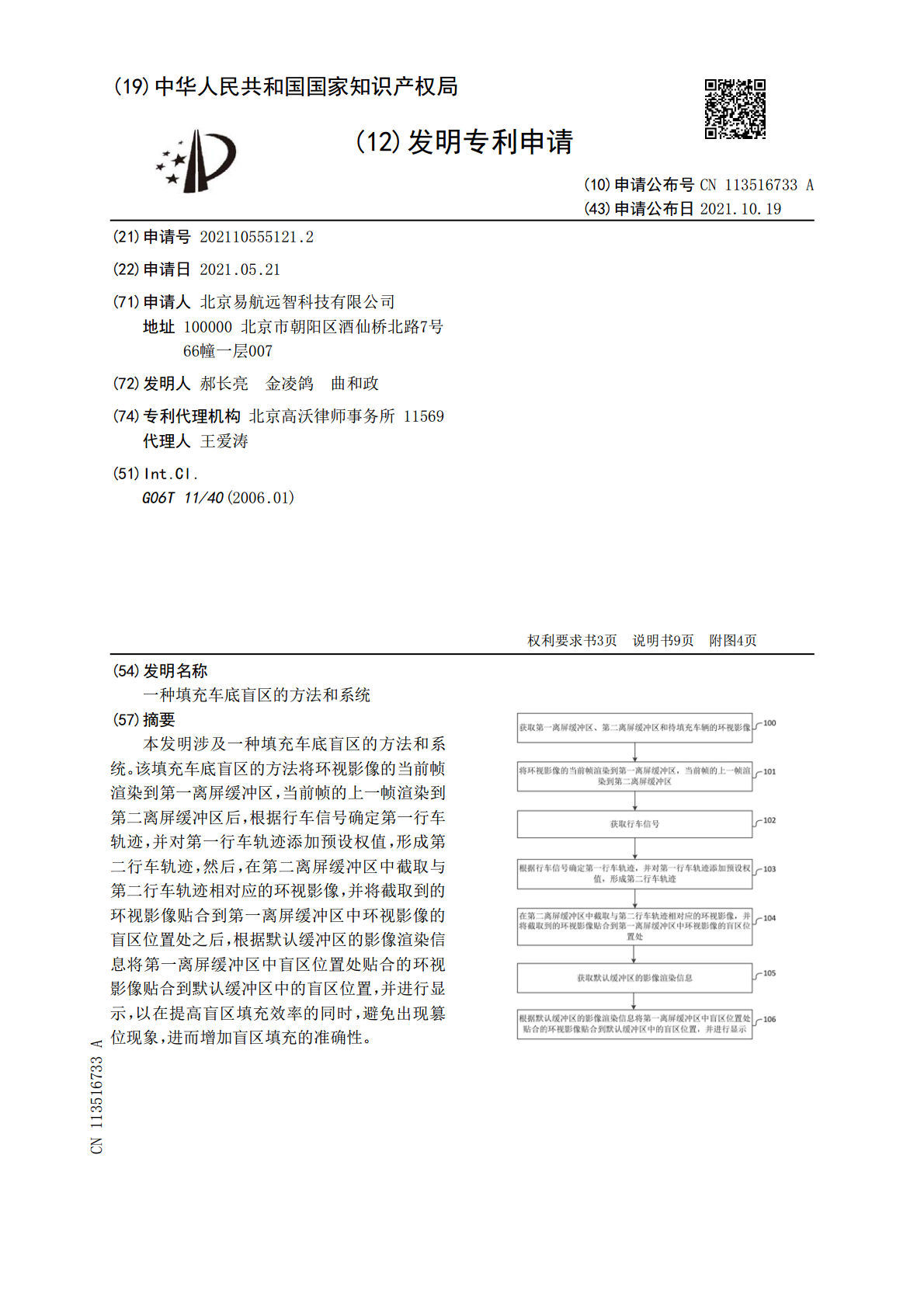
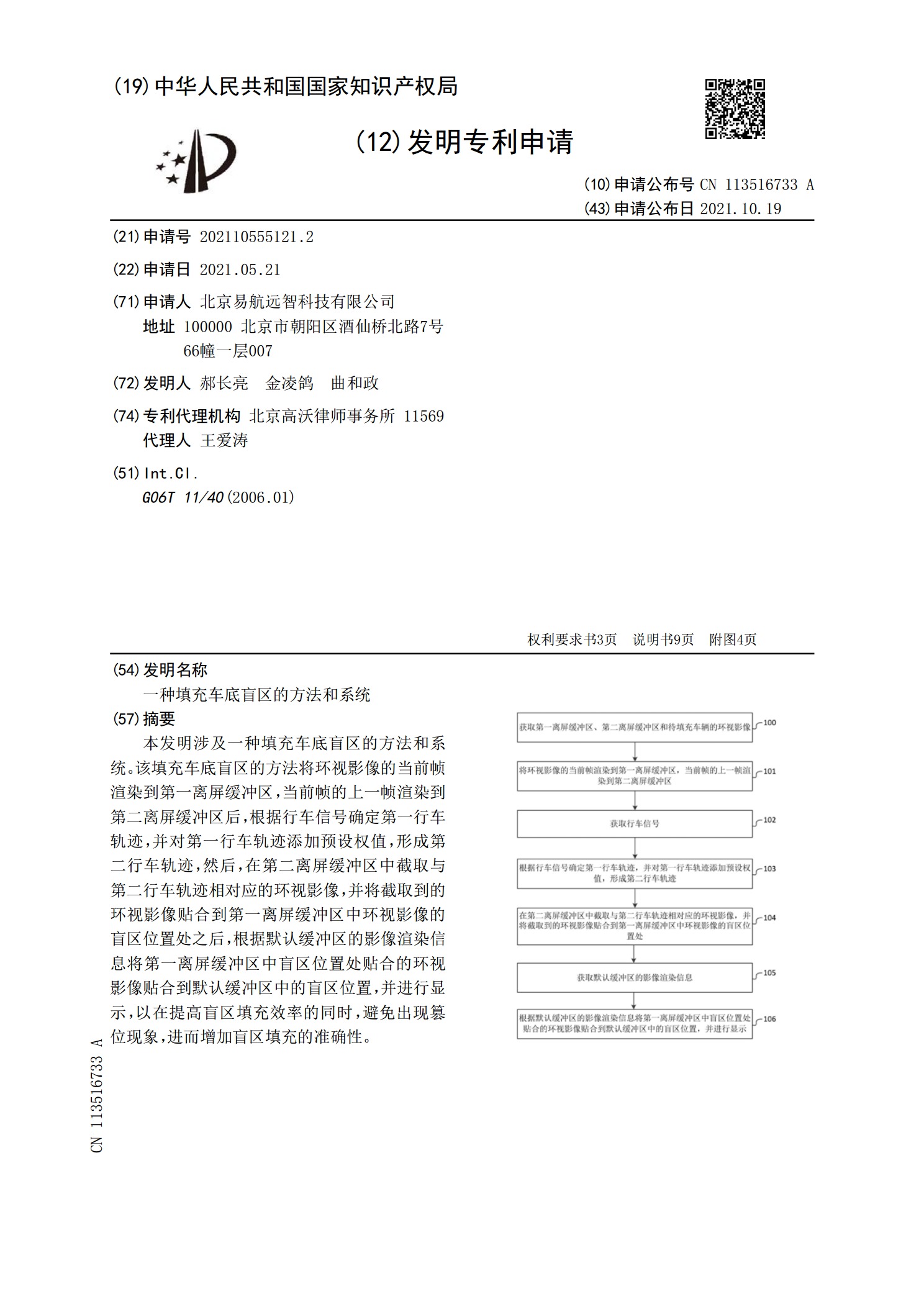
本发明涉及一种填充车底盲区的方法和系统。该填充车底盲区的方法将环视影像的当前帧渲染到第一离屏缓冲区,当前帧的上一帧渲染到第二离屏缓冲区后,根据行车信号确定第一行车轨迹,并对第一行车轨迹添加预设权值,形成第二行车轨迹,然后,在第二离屏缓冲区中截取与第二行车轨迹相对应的环视影像,并将截取到的环视影像贴合到第一离屏缓冲区中环视影像的盲区位置处之后,根据默认缓冲区的影像渲染信息将第一离屏缓冲区中盲区位置处贴合的环视影像贴合到默认缓冲区中的盲区位置,并进行显示,以在提高盲区填充效率的同时,避免出现篡位现象,进而增加
车底盲区探测系统、车底盲区探测方法和车辆启动方法.pdf
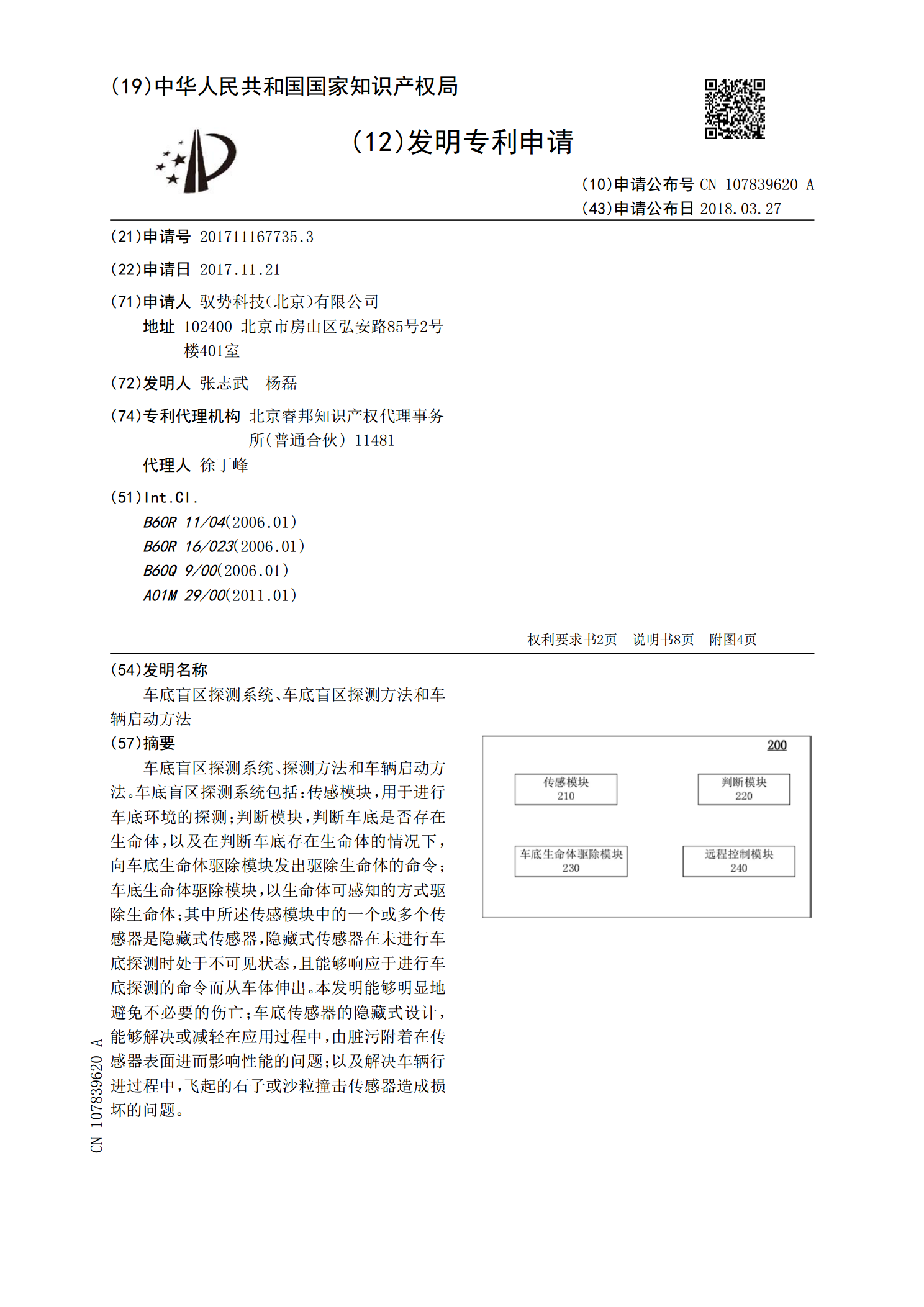
车底盲区探测系统、探测方法和车辆启动方法。车底盲区探测系统包括:传感模块,用于进行车底环境的探测;判断模块,判断车底是否存在生命体,以及在判断车底存在生命体的情况下,向车底生命体驱除模块发出驱除生命体的命令;车底生命体驱除模块,以生命体可感知的方式驱除生命体;其中所述传感模块中的一个或多个传感器是隐藏式传感器,隐藏式传感器在未进行车底探测时处于不可见状态,且能够响应于进行车底探测的命令而从车体伸出。本发明能够明显地避免不必要的伤亡;车底传感器的隐藏式设计,能够解决或减轻在应用过程中,由脏污附着在传感器表面
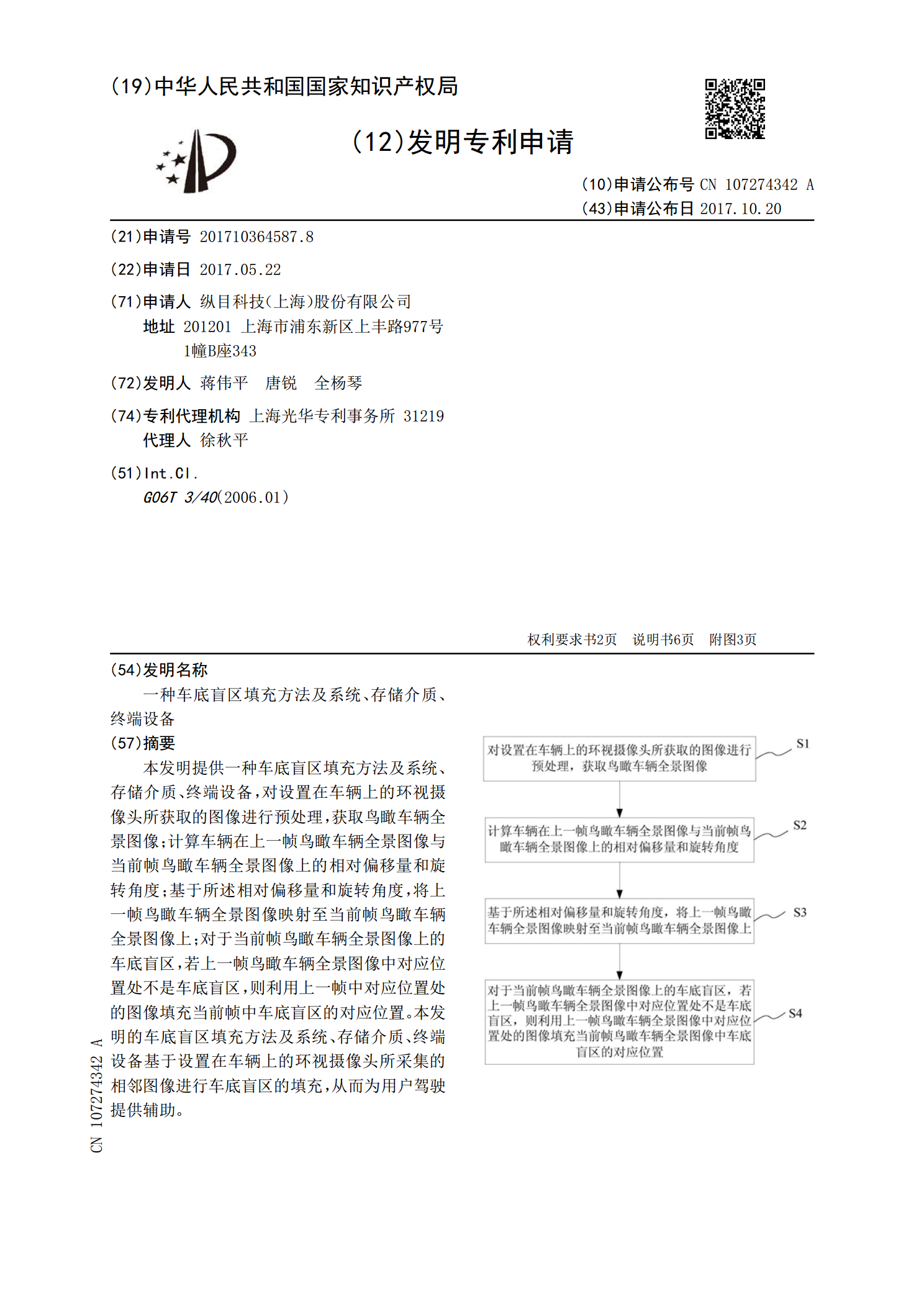
一种车底盲区填充方法及系统、存储介质、终端设备.pdf
本发明提供一种车底盲区填充方法及系统、存储介质、终端设备,对设置在车辆上的环视摄像头所获取的图像进行预处理,获取鸟瞰车辆全景图像;计算车辆在上一帧鸟瞰车辆全景图像与当前帧鸟瞰车辆全景图像上的相对偏移量和旋转角度;基于所述相对偏移量和旋转角度,将上一帧鸟瞰车辆全景图像映射至当前帧鸟瞰车辆全景图像上;对于当前帧鸟瞰车辆全景图像上的车底盲区,若上一帧鸟瞰车辆全景图像中对应位置处不是车底盲区,则利用上一帧中对应位置处的图像填充当前帧中车底盲区的对应位置。本发明的车底盲区填充方法及系统、存储介质、终端设备基于设置在
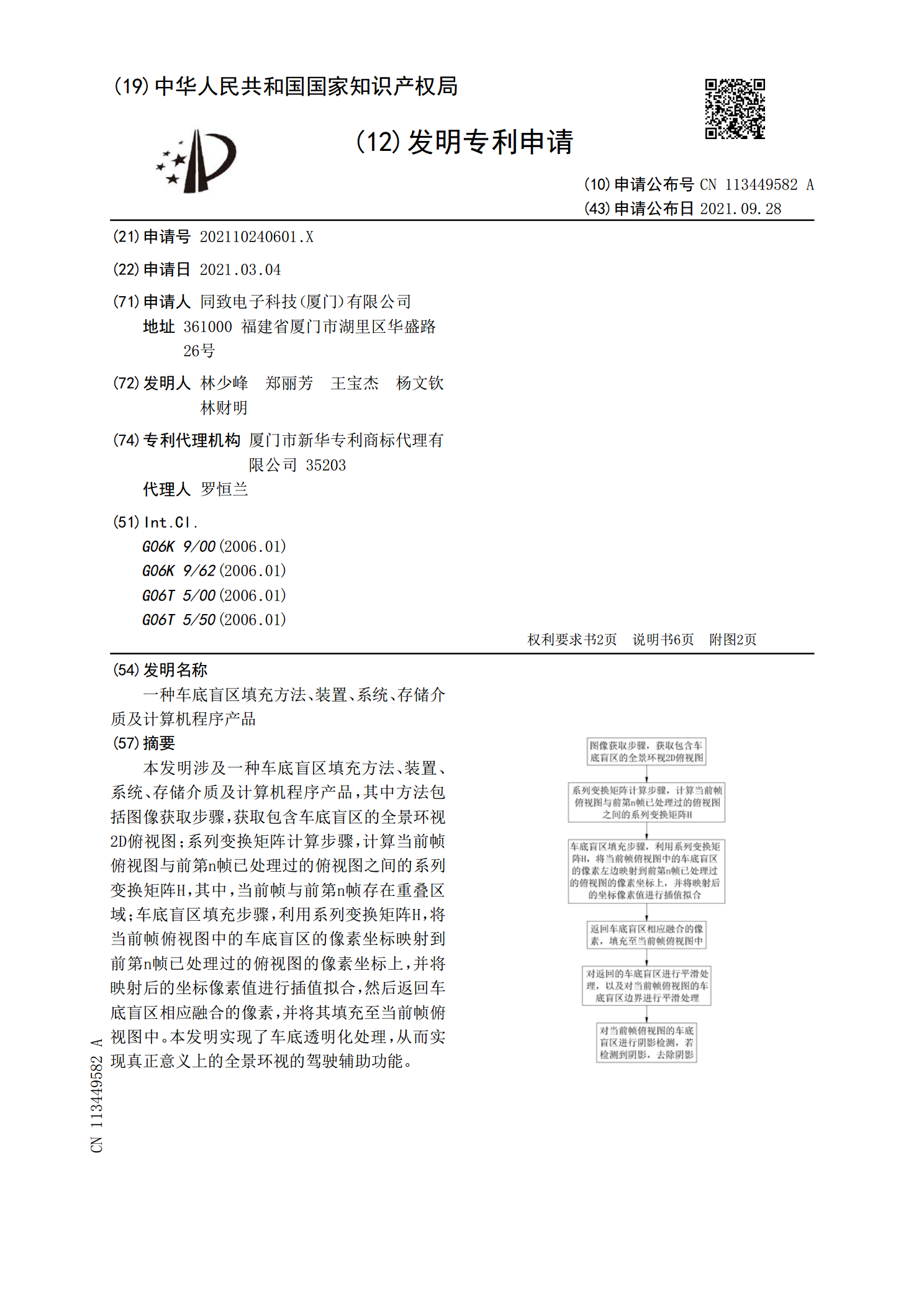
一种车底盲区填充方法、装置、系统、存储介质及计算机程序产品.pdf
本发明涉及一种车底盲区填充方法、装置、系统、存储介质及计算机程序产品,其中方法包括图像获取步骤,获取包含车底盲区的全景环视2D俯视图;系列变换矩阵计算步骤,计算当前帧俯视图与前第n帧已处理过的俯视图之间的系列变换矩阵H,其中,当前帧与前第n帧存在重叠区域;车底盲区填充步骤,利用系列变换矩阵H,将当前帧俯视图中的车底盲区的像素坐标映射到前第n帧已处理过的俯视图的像素坐标上,并将映射后的坐标像素值进行插值拟合,然后返回车底盲区相应融合的像素,并将其填充至当前帧俯视图中。本发明实现了车底透明化处理,从而实现真正

一种盲区监控系统和方法.pdf
本申请实施例公开了一种盲区监控系统和方法,该系统包括:监测单元和警示单元;监测单元设置为实时获取车身周边预设范围内进入盲区的目标对象,并确定所述目标对象与车身之间的距离;警示单元设置为若所述目标对象与车身之间的距离小于或者等于预设的距离阈值,向所述目标对象发起可视化的警示信息,其中,所述警示信息的显示位置在所述目标对象的视线范围内。通过该实施方案,无论车辆属于何种行驶状态,都能够帮助视觉盲区处目标对象知晓自身是否处于驾驶员的视觉盲区,避免事故的发生。