
一种车辆盲区预警方法及装置.pdf

是你****噩呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车辆盲区预警方法及装置.pdf
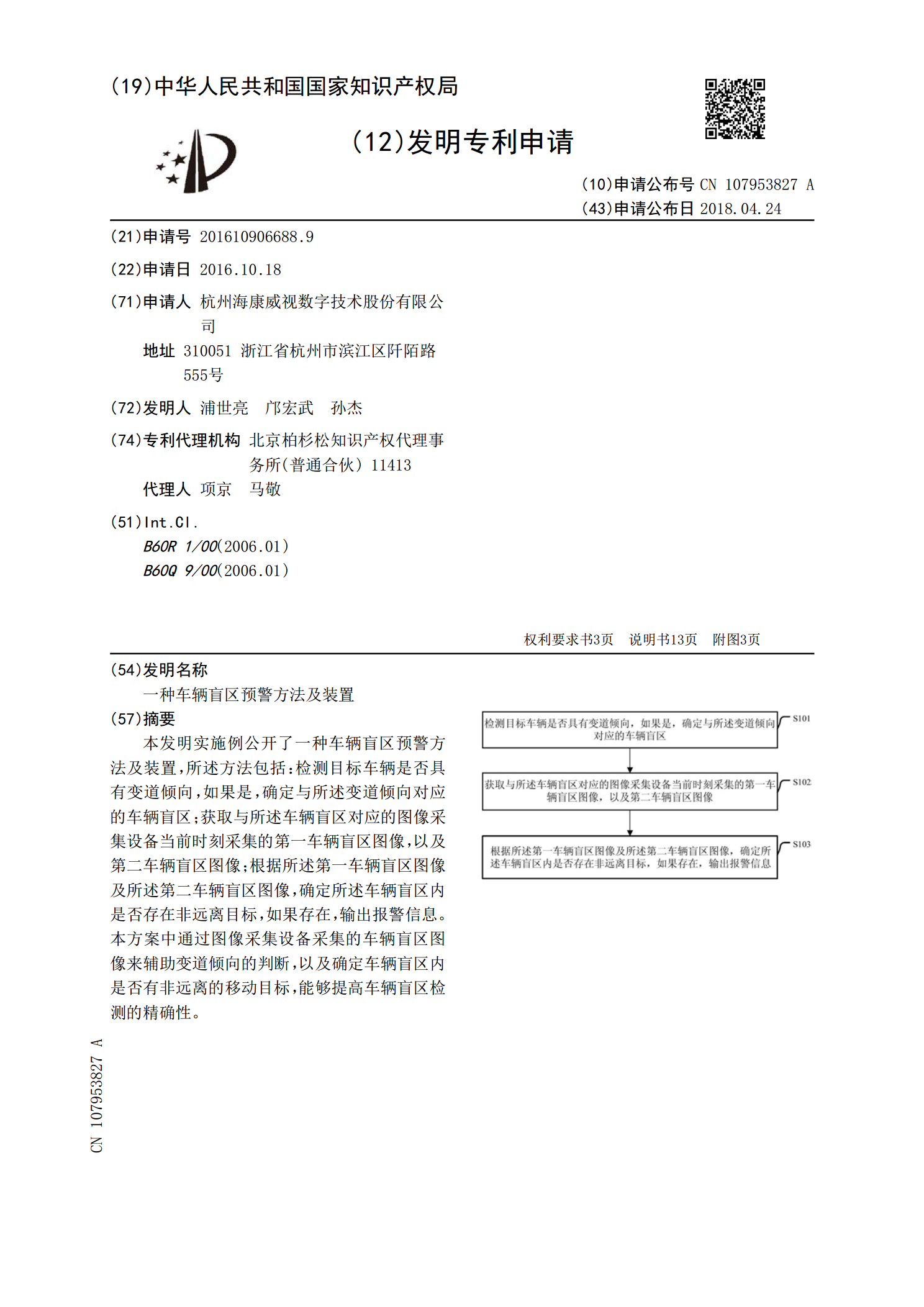
本发明实施例公开了一种车辆盲区预警方法及装置,所述方法包括:检测目标车辆是否具有变道倾向,如果是,确定与所述变道倾向对应的车辆盲区;获取与所述车辆盲区对应的图像采集设备当前时刻采集的第一车辆盲区图像,以及第二车辆盲区图像;根据所述第一车辆盲区图像及所述第二车辆盲区图像,确定所述车辆盲区内是否存在非远离目标,如果存在,输出报警信息。本方案中通过图像采集设备采集的车辆盲区图像来辅助变道倾向的判断,以及确定车辆盲区内是否有非远离的移动目标,能够提高车辆盲区检测的精确性。
盲区预警方法、装置及车辆.pdf
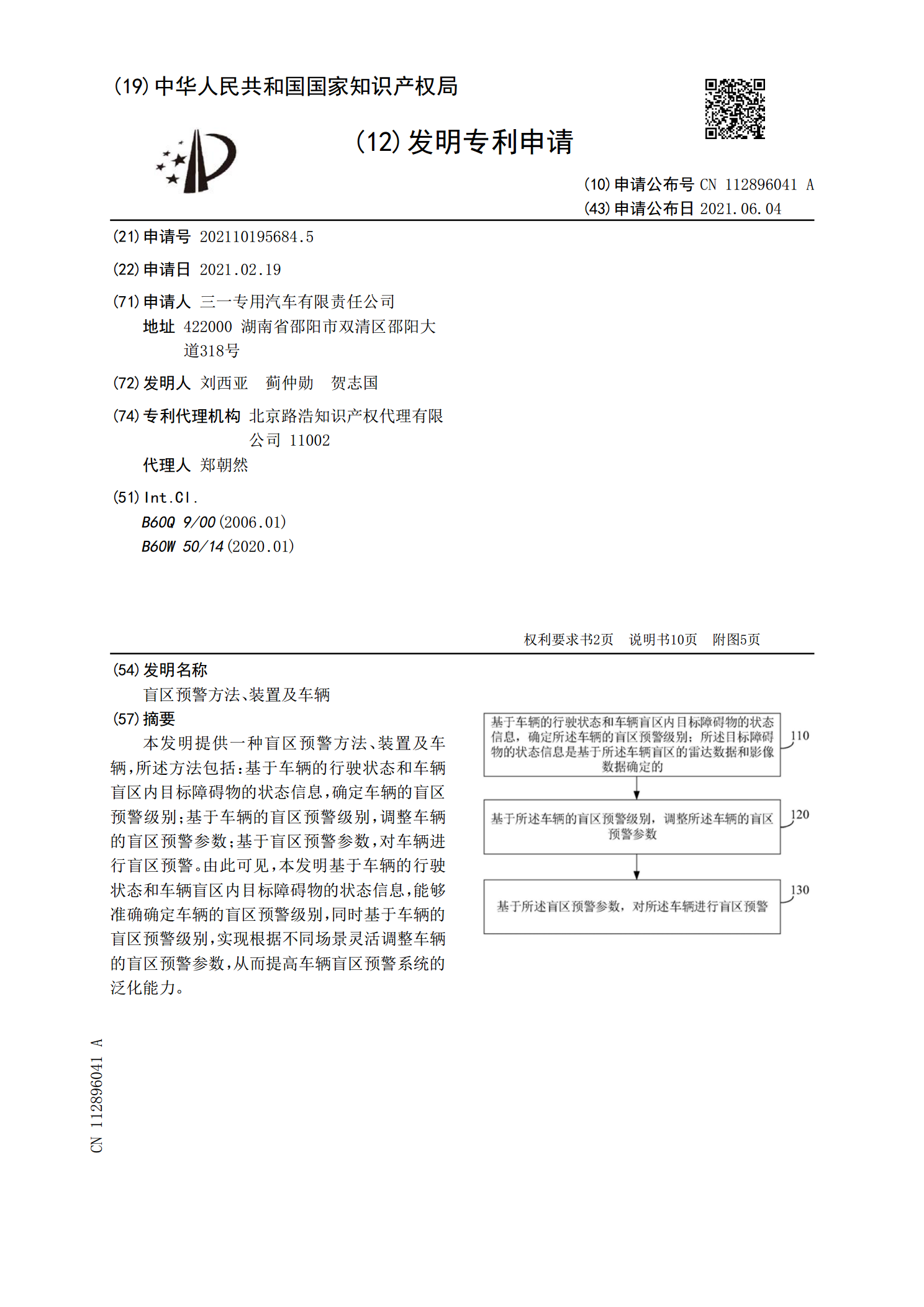
本发明提供一种盲区预警方法、装置及车辆,所述方法包括:基于车辆的行驶状态和车辆盲区内目标障碍物的状态信息,确定车辆的盲区预警级别;基于车辆的盲区预警级别,调整车辆的盲区预警参数;基于盲区预警参数,对车辆进行盲区预警。由此可见,本发明基于车辆的行驶状态和车辆盲区内目标障碍物的状态信息,能够准确确定车辆的盲区预警级别,同时基于车辆的盲区预警级别,实现根据不同场景灵活调整车辆的盲区预警参数,从而提高车辆盲区预警系统的泛化能力。
一种车辆转弯视野盲区的预警装置及方法.pdf
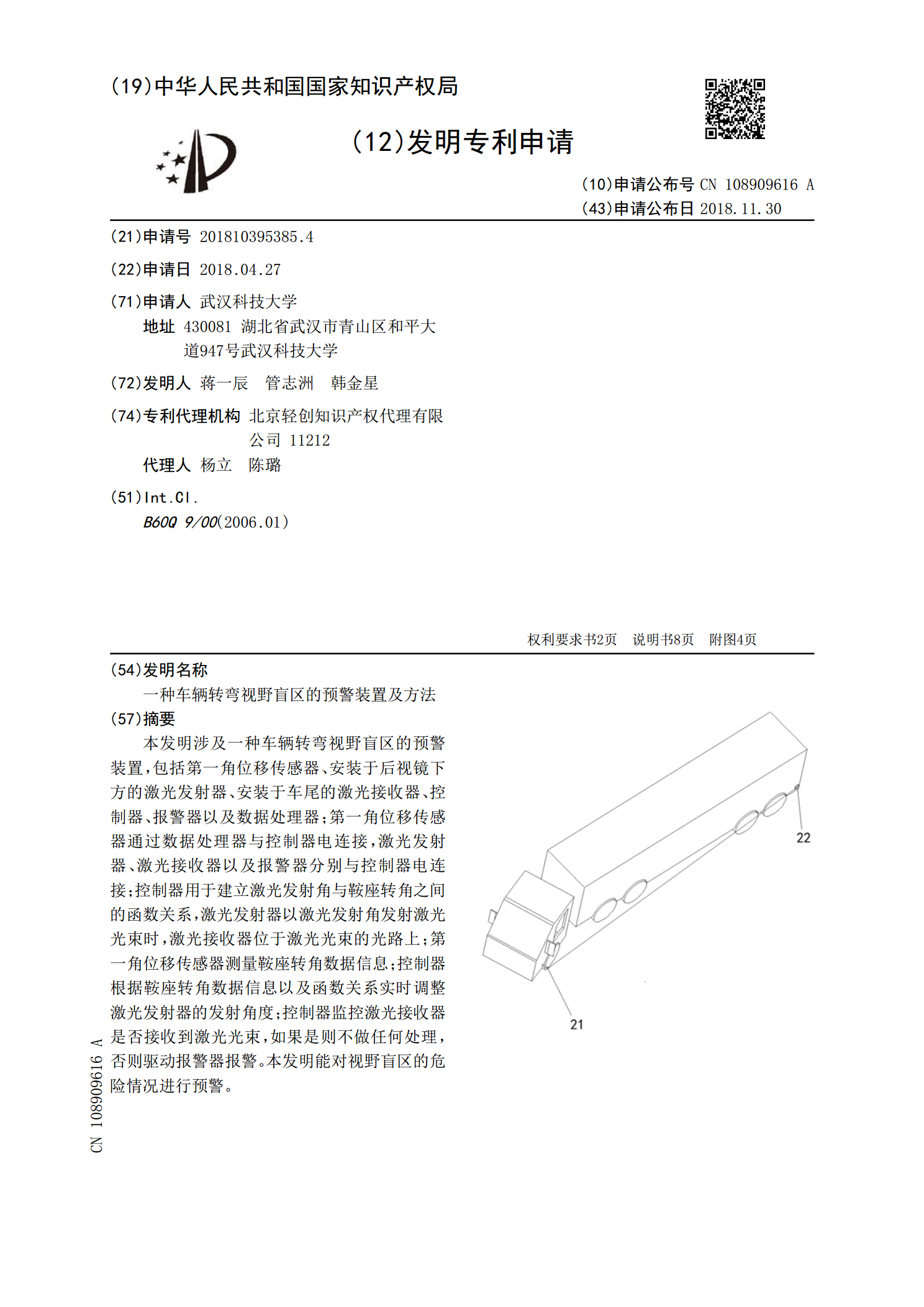
本发明涉及一种车辆转弯视野盲区的预警装置,包括第一角位移传感器、安装于后视镜下方的激光发射器、安装于车尾的激光接收器、控制器、报警器以及数据处理器;第一角位移传感器通过数据处理器与控制器电连接,激光发射器、激光接收器以及报警器分别与控制器电连接;控制器用于建立激光发射角与鞍座转角之间的函数关系,激光发射器以激光发射角发射激光光束时,激光接收器位于激光光束的光路上;第一角位移传感器测量鞍座转角数据信息;控制器根据鞍座转角数据信息以及函数关系实时调整激光发射器的发射角度;控制器监控激光接收器是否接收到激光光束
一种基于车辆盲区的监控预警装置及方法.pdf
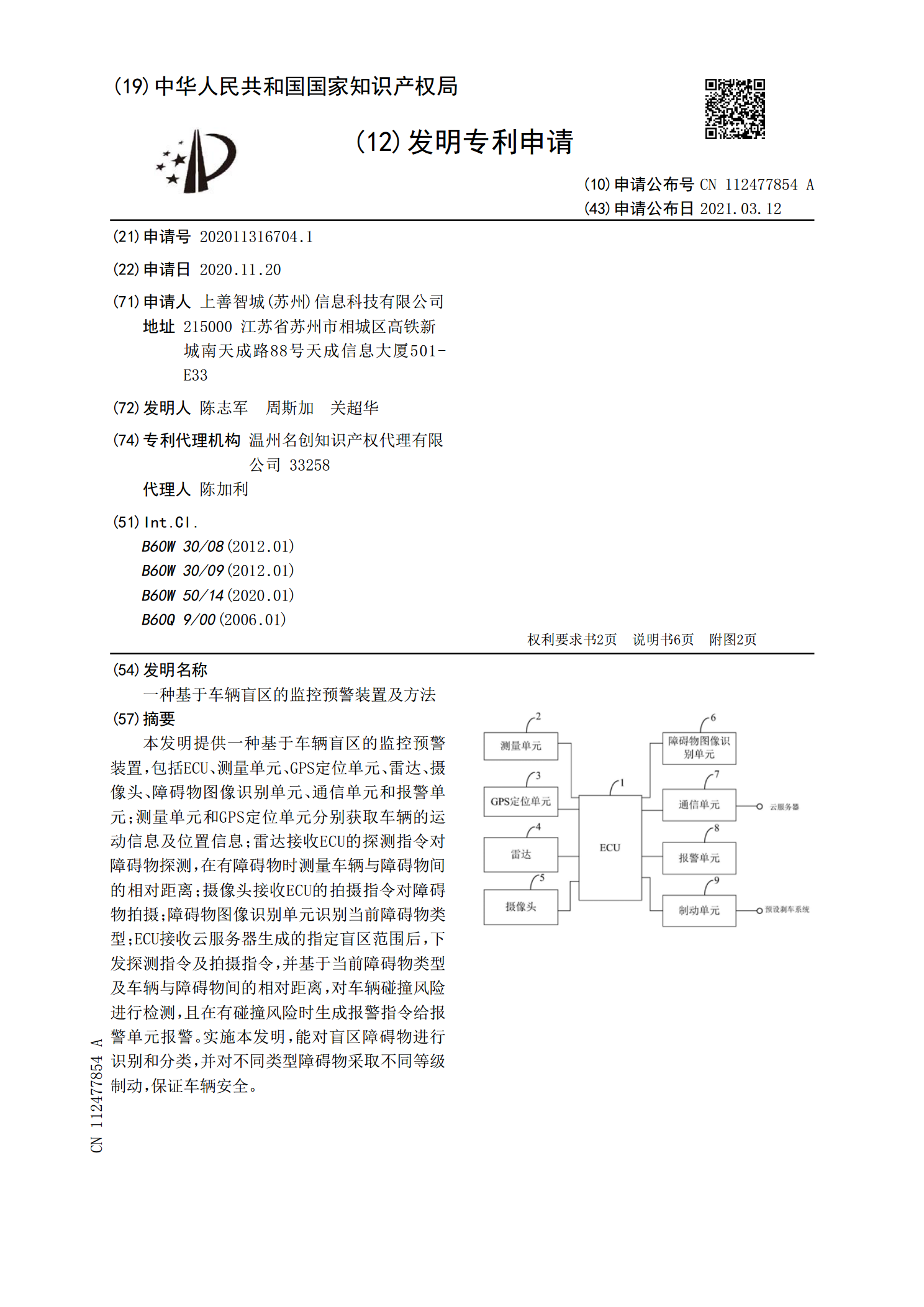
本发明提供一种基于车辆盲区的监控预警装置,包括ECU、测量单元、GPS定位单元、雷达、摄像头、障碍物图像识别单元、通信单元和报警单元;测量单元和GPS定位单元分别获取车辆的运动信息及位置信息;雷达接收ECU的探测指令对障碍物探测,在有障碍物时测量车辆与障碍物间的相对距离;摄像头接收ECU的拍摄指令对障碍物拍摄;障碍物图像识别单元识别当前障碍物类型;ECU接收云服务器生成的指定盲区范围后,下发探测指令及拍摄指令,并基于当前障碍物类型及车辆与障碍物间的相对距离,对车辆碰撞风险进行检测,且在有碰撞风险时生成报警
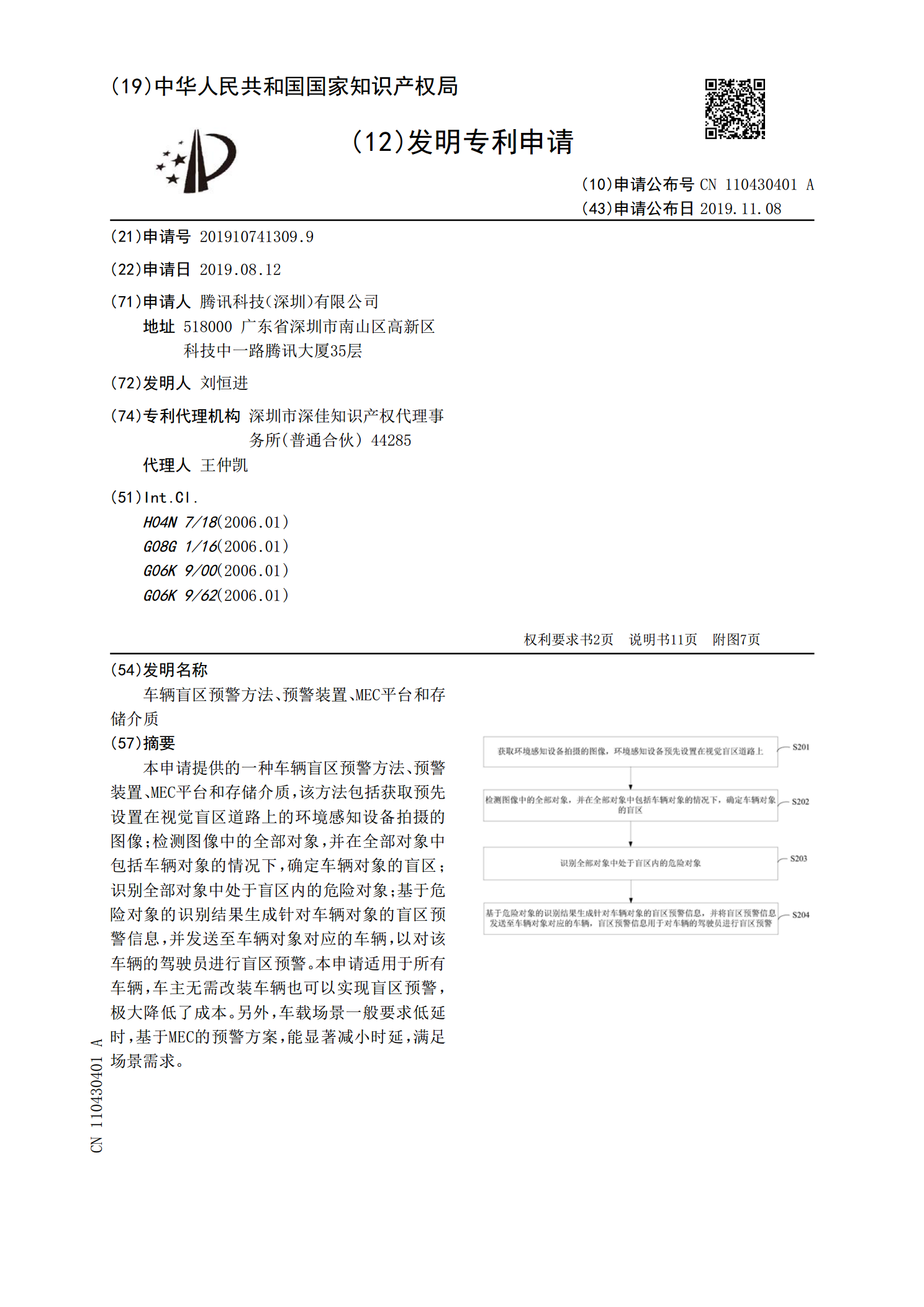
车辆盲区预警方法、预警装置、MEC平台和存储介质.pdf
本申请提供的一种车辆盲区预警方法、预警装置、MEC平台和存储介质,该方法包括获取预先设置在视觉盲区道路上的环境感知设备拍摄的图像;检测图像中的全部对象,并在全部对象中包括车辆对象的情况下,确定车辆对象的盲区;识别全部对象中处于盲区内的危险对象;基于危险对象的识别结果生成针对车辆对象的盲区预警信息,并发送至车辆对象对应的车辆,以对该车辆的驾驶员进行盲区预警。本申请适用于所有车辆,车主无需改装车辆也可以实现盲区预警,极大降低了成本。另外,车载场景一般要求低延时,基于MEC的预警方案,能显著减小时延,满足场景需