
一种双视场激光雷达信号处理方法.pdf

mm****酱吖


1/7

2/7
3/7

4/7
5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种双视场激光雷达信号处理方法.pdf
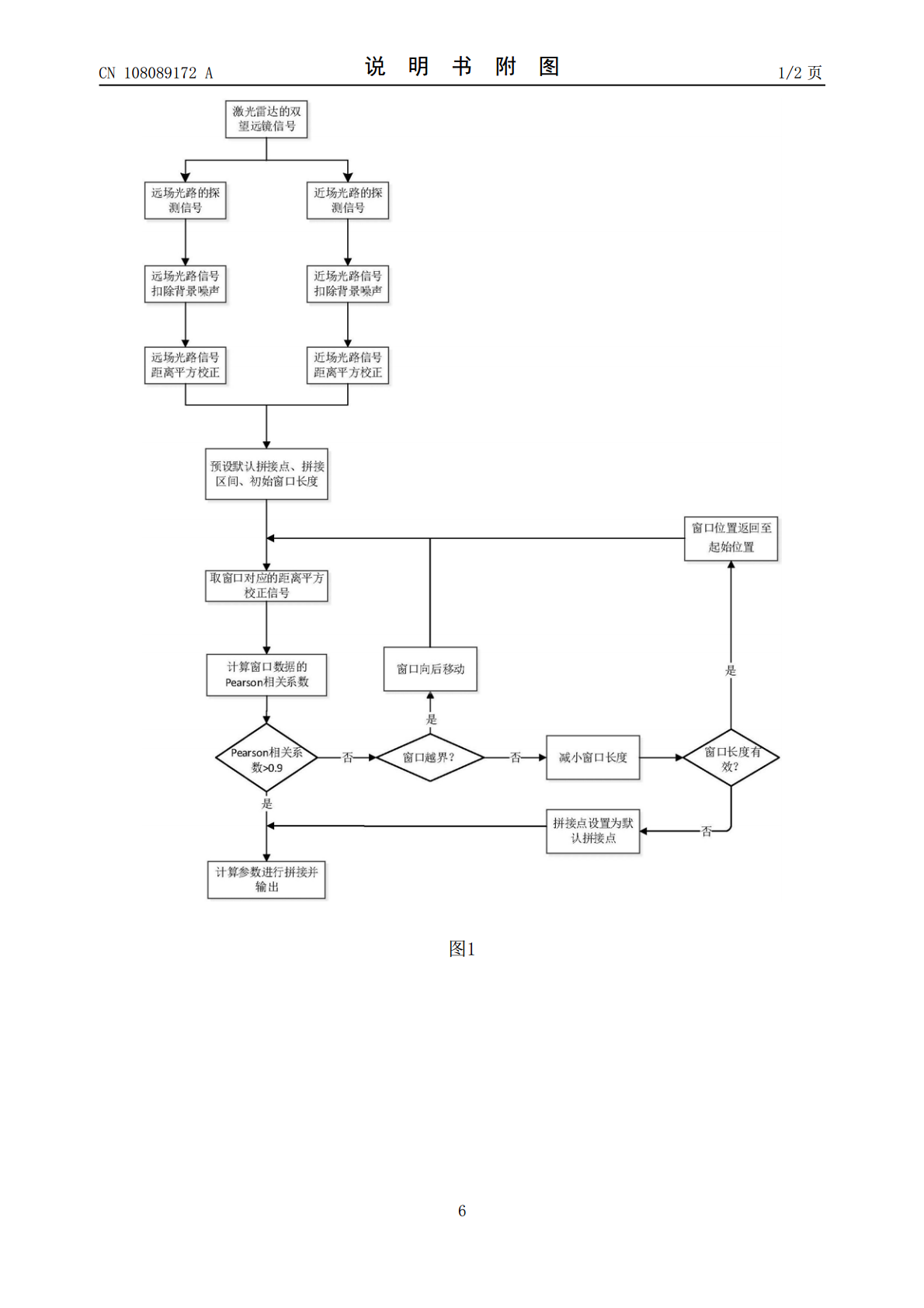
本发明公开了一种双视场激光雷达信号处理方法,包括以下步骤:对双视场的原始信号进行距离平方校准;通过计算窗口数据的Pearson相关系数来确认是否进行拼接;通过动态改变拼接窗口位置和窗口长度确定拼接位置;根据上述的拼接位置计算拼接系数;对双视场信号按上述系数进行动态拼接处理,得到拼接后信号。本发明具有探测范围大、盲区小等优点。
一种信号处理方法及激光雷达系统.pdf
本发明提供了一种信号处理方法及激光雷达系统,应用于激光雷达系统,该激光雷达系统的同轴收发器件分别与至少两个光电探测器连接,各光电探测器的探测范围不同,该信号处理方法包括:在激光器发出出射光束的脉冲周期内,设置光电探测器的探测顺序;基于探测顺序控制各光电探测器分时段依次探测回波信号,其中,每个时段内至少一个光电探测器探测回波信号,光电探测器的探测顺序按照饱和光功率由大到小排序。本发明不仅能够减小光纤端面反射噪声对于近距离目标回波探测的影响,进而减小近距离探测盲区,而且也可以保障远距离探测能力,实现激光雷达探
一种双视场避障激光雷达发射系统.pdf
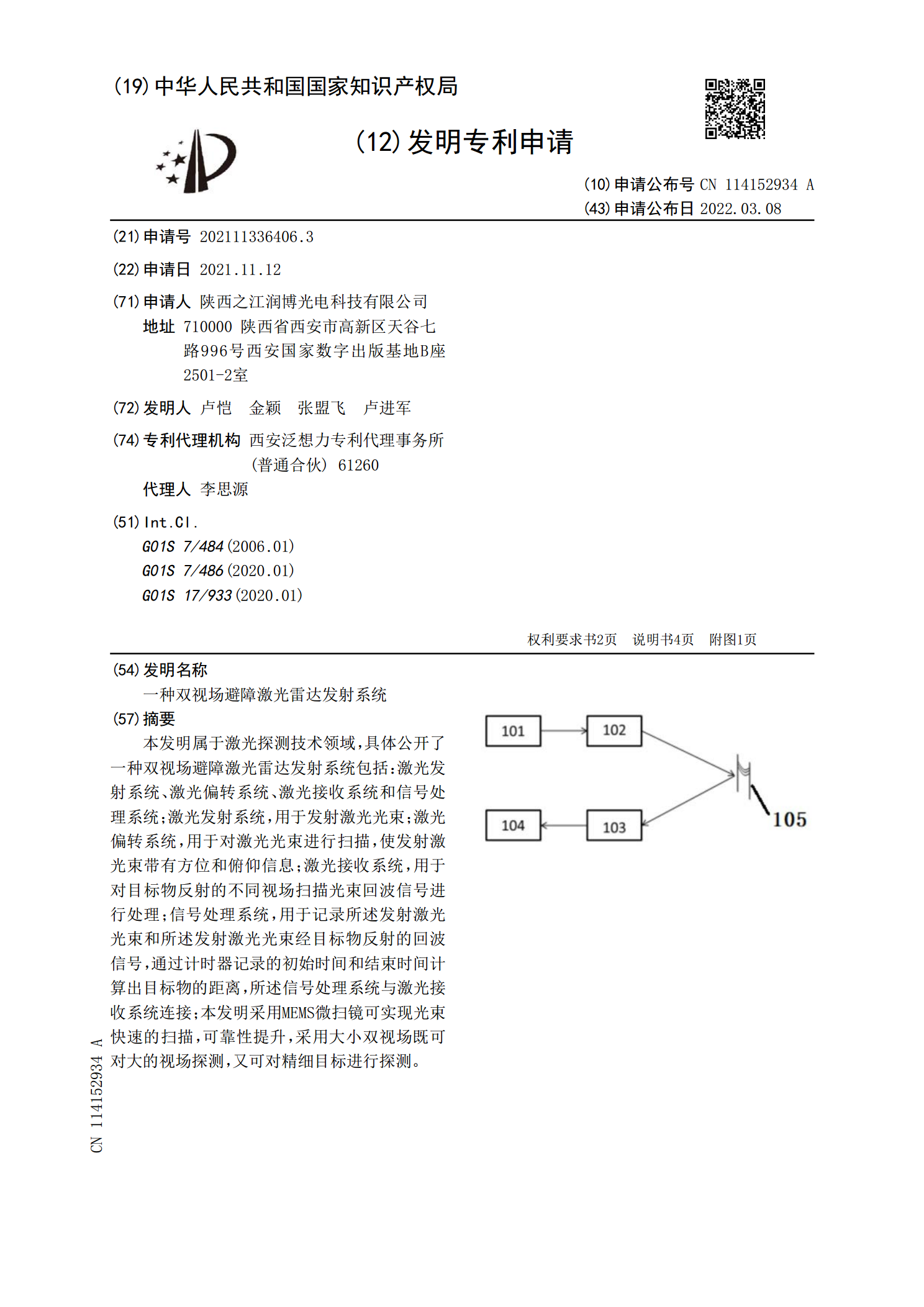
本发明属于激光探测技术领域,具体公开了一种双视场避障激光雷达发射系统包括:激光发射系统、激光偏转系统、激光接收系统和信号处理系统;激光发射系统,用于发射激光光束;激光偏转系统,用于对激光光束进行扫描,使发射激光束带有方位和俯仰信息;激光接收系统,用于对目标物反射的不同视场扫描光束回波信号进行处理;信号处理系统,用于记录所述发射激光光束和所述发射激光光束经目标物反射的回波信号,通过计时器记录的初始时间和结束时间计算出目标物的距离,所述信号处理系统与激光接收系统连接;本发明采用MEMS微扫镜可实现光束快速的扫

一种实现双视场低盲区探测的双光纤激光雷达系统.pdf
本发明公开了一种实现双视场低盲区探测的双光纤激光雷达系统,包括有发射光学系统和接收光学系统,所述的发射光学系统向大气中发射光信号,经过大气后产生的后向散射信号被接收光学系统所接收,在所述的接收光学系统的焦平面处放置有主轴光纤和旁轴光纤,所述的接收光纤系统所接收的散射信号通过主轴光纤和旁轴光纤发送出去。本发明应用在主轴光纤基础上增加一个旁轴光纤,来实现激光雷达探测盲区的压制目的,这种探测技术实现起来不仅机构稳定性较目前探测技术而言有明显的提高,而且采用双光纤探测技术直接将两个回波信号进行耦合,避免信号拼接带

激光雷达回波信号及处理方法分析.docx
激光雷达回波信号及处理方法分析激光雷达回波信号及处理方法分析激光雷达是一种利用激光束测量目标距离、速度和方向的遥感技术。随着激光雷达在自动驾驶、机器人、智能物流等领域的广泛应用,对激光雷达回波信号的精确分析与处理显得尤为关键。一、激光雷达回波信号激光雷达测量目标距离的原理,就是通过向目标发射激光束,并通过接收目标反射的激光束来测量距离。当激光束照射到目标时,会发生反射、散射、折射等现象,形成回波信号。回波信号的特点是带有距离、角度和强度等信息。1.回波信号的距离信息由于激光的光速较快,激光雷达可以精确测量