
一种红外图像盲元检测方法.pdf

An****99

1/5
2/5
3/5
4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种红外图像盲元检测方法.pdf
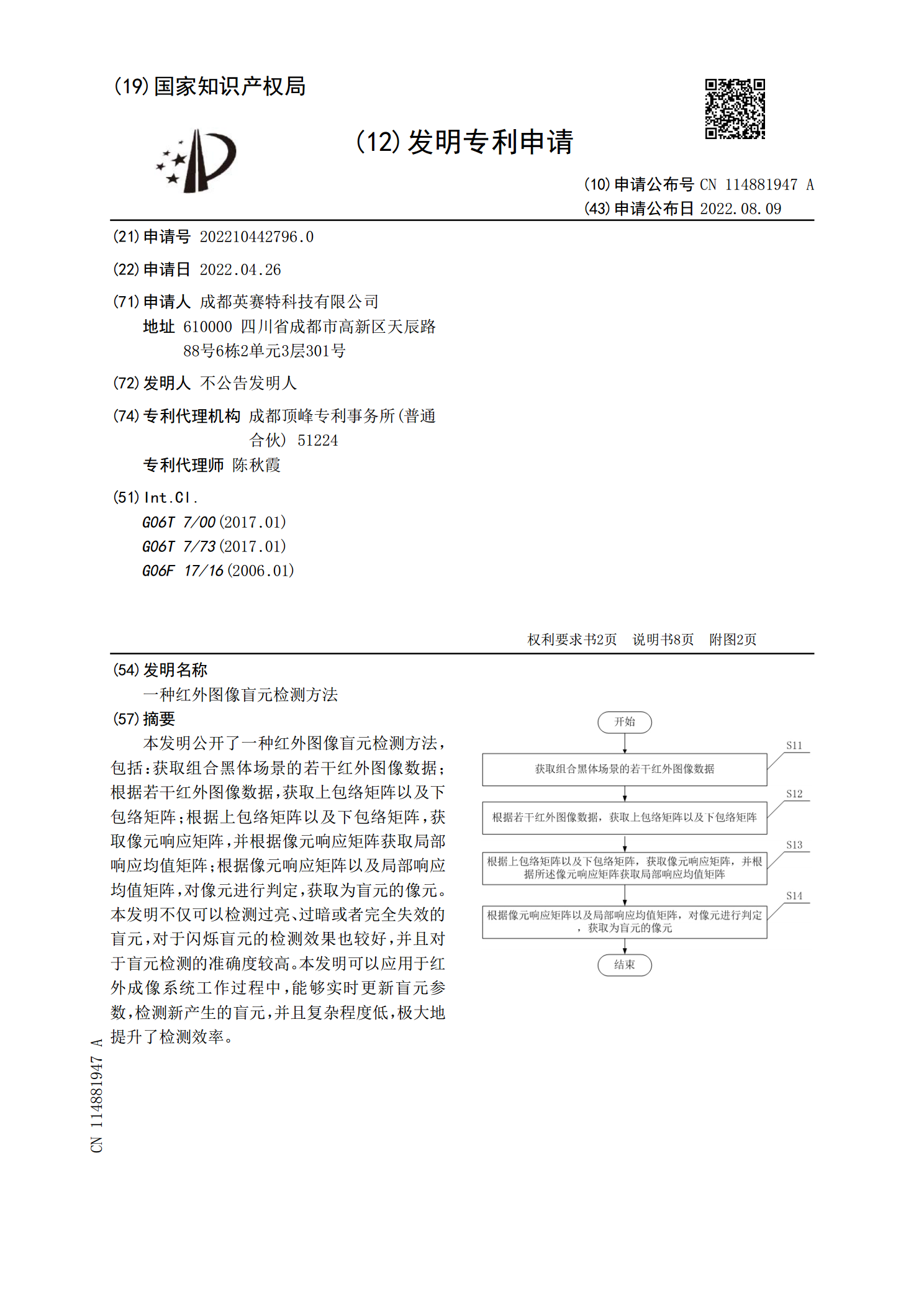
本发明公开了一种红外图像盲元检测方法,包括:获取组合黑体场景的若干红外图像数据;根据若干红外图像数据,获取上包络矩阵以及下包络矩阵;根据上包络矩阵以及下包络矩阵,获取像元响应矩阵,并根据像元响应矩阵获取局部响应均值矩阵;根据像元响应矩阵以及局部响应均值矩阵,对像元进行判定,获取为盲元的像元。本发明不仅可以检测过亮、过暗或者完全失效的盲元,对于闪烁盲元的检测效果也较好,并且对于盲元检测的准确度较高。本发明可以应用于红外成像系统工作过程中,能够实时更新盲元参数,检测新产生的盲元,并且复杂程度低,极大地提升了检
一种红外图像盲元检测方法.pdf
本发明属于红外热成像技术领域,公开了一种红外图像盲元检测方法,是基于Y16视频数据的盲元检测方法,其特征在于,其具体方法步骤如下:a.对黑体采集的Y16视频数据,计算出每个像元在时域内的最大值、最小值和均值,得到最大值矩阵、最小值矩阵和均值矩阵;b.计算每个像元最大值与均值的差、最小值与均值的差,在两者中选取最大差值与红外图像像元阈值进行比较,判断该像元是否是盲元;c.对均值矩阵局部加窗遍历,计算窗口内的标准差,检测步骤b未检测出的过亮或过暗像元;c.利用“3σ”原则判断当前像元是否为盲元,修改判断条件,
红外图像盲元检测方法.pdf
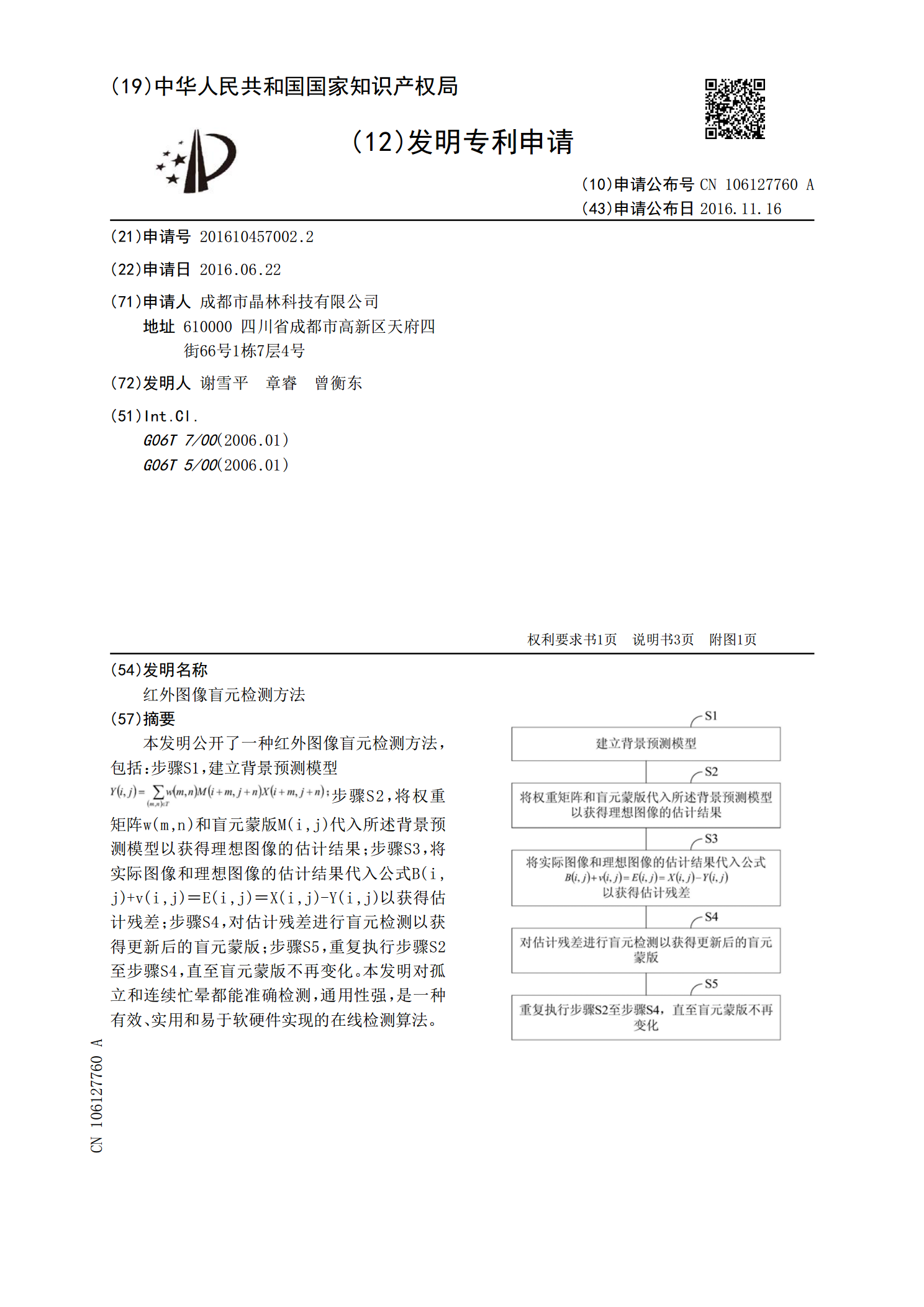
本发明公开了一种红外图像盲元检测方法,包括:步骤S1,建立背景预测模型
一种红外图像盲元的检测处理方法及系统.pdf
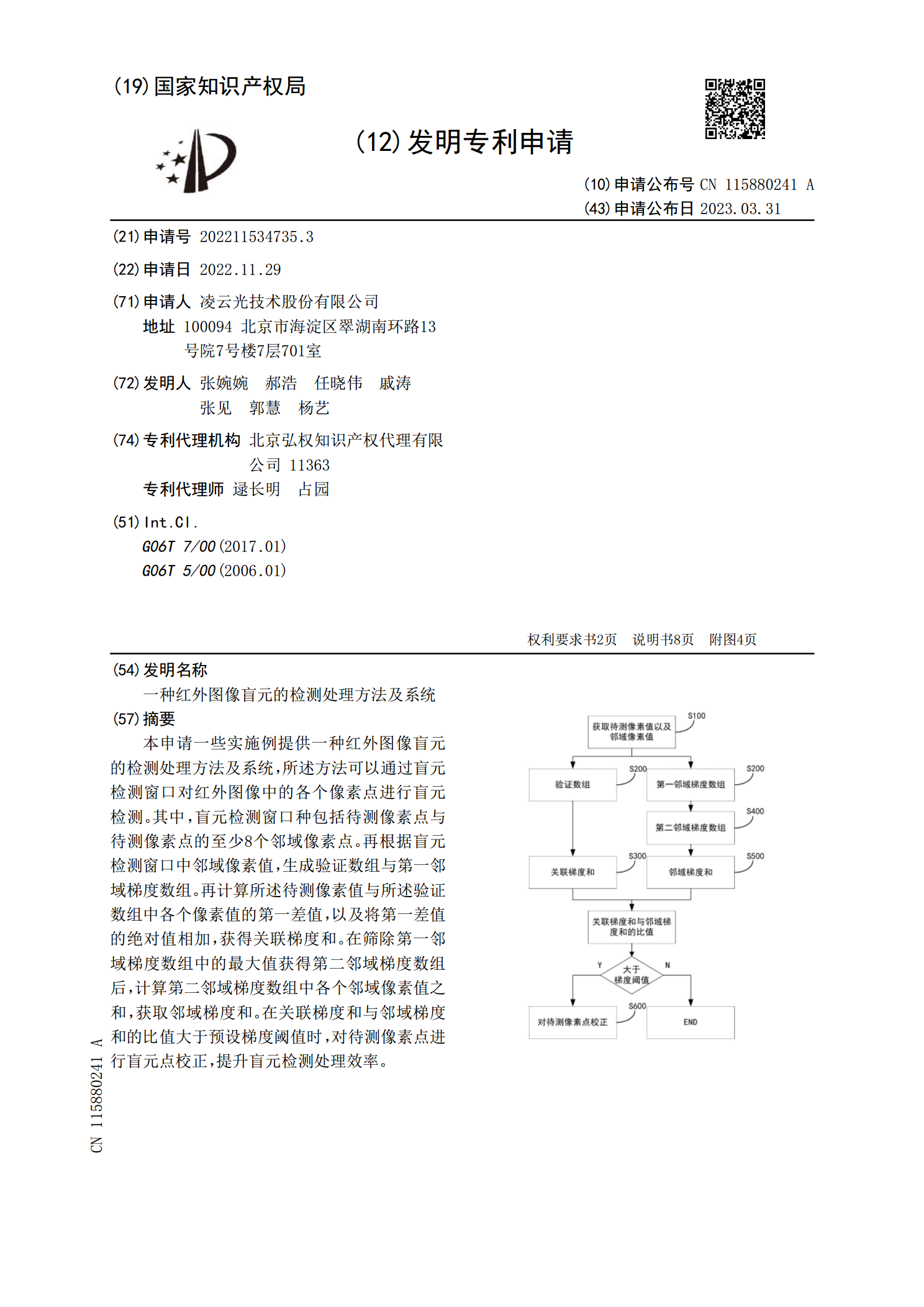
本申请一些实施例提供一种红外图像盲元的检测处理方法及系统,所述方法可以通过盲元检测窗口对红外图像中的各个像素点进行盲元检测。其中,盲元检测窗口种包括待测像素点与待测像素点的至少8个邻域像素点。再根据盲元检测窗口中邻域像素值,生成验证数组与第一邻域梯度数组。再计算所述待测像素值与所述验证数组中各个像素值的第一差值,以及将第一差值的绝对值相加,获得关联梯度和。在筛除第一邻域梯度数组中的最大值获得第二邻域梯度数组后,计算第二邻域梯度数组中各个邻域像素值之和,获取邻域梯度和。在关联梯度和与邻域梯度和的比值大于预设
一种基于本底的红外图像盲元检测方法及系统.pdf
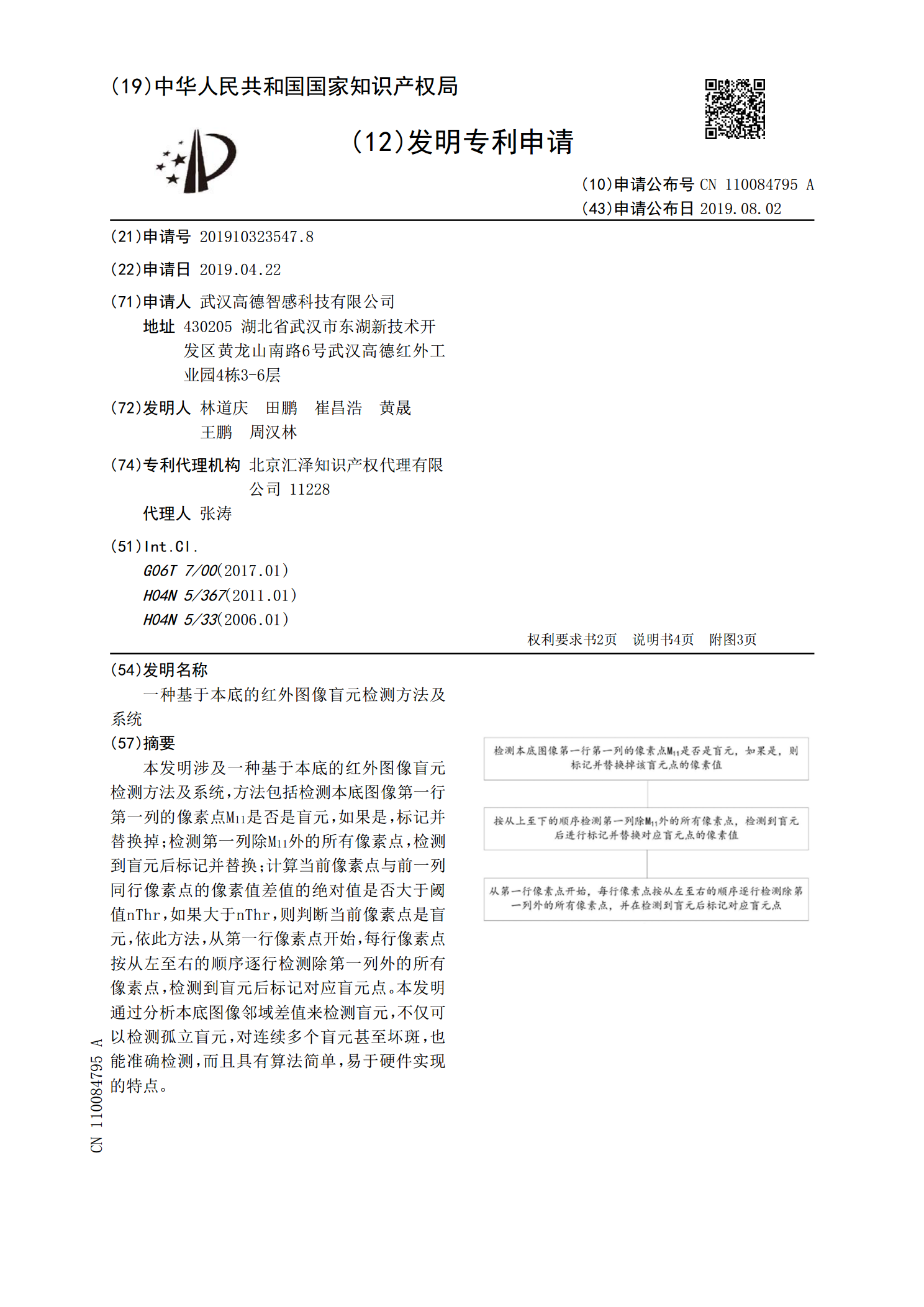
本发明涉及一种基于本底的红外图像盲元检测方法及系统,方法包括检测本底图像第一行第一列的像素点M