
红外图像盲元检测方法.pdf

玉环****找我

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
红外图像盲元检测方法.pdf
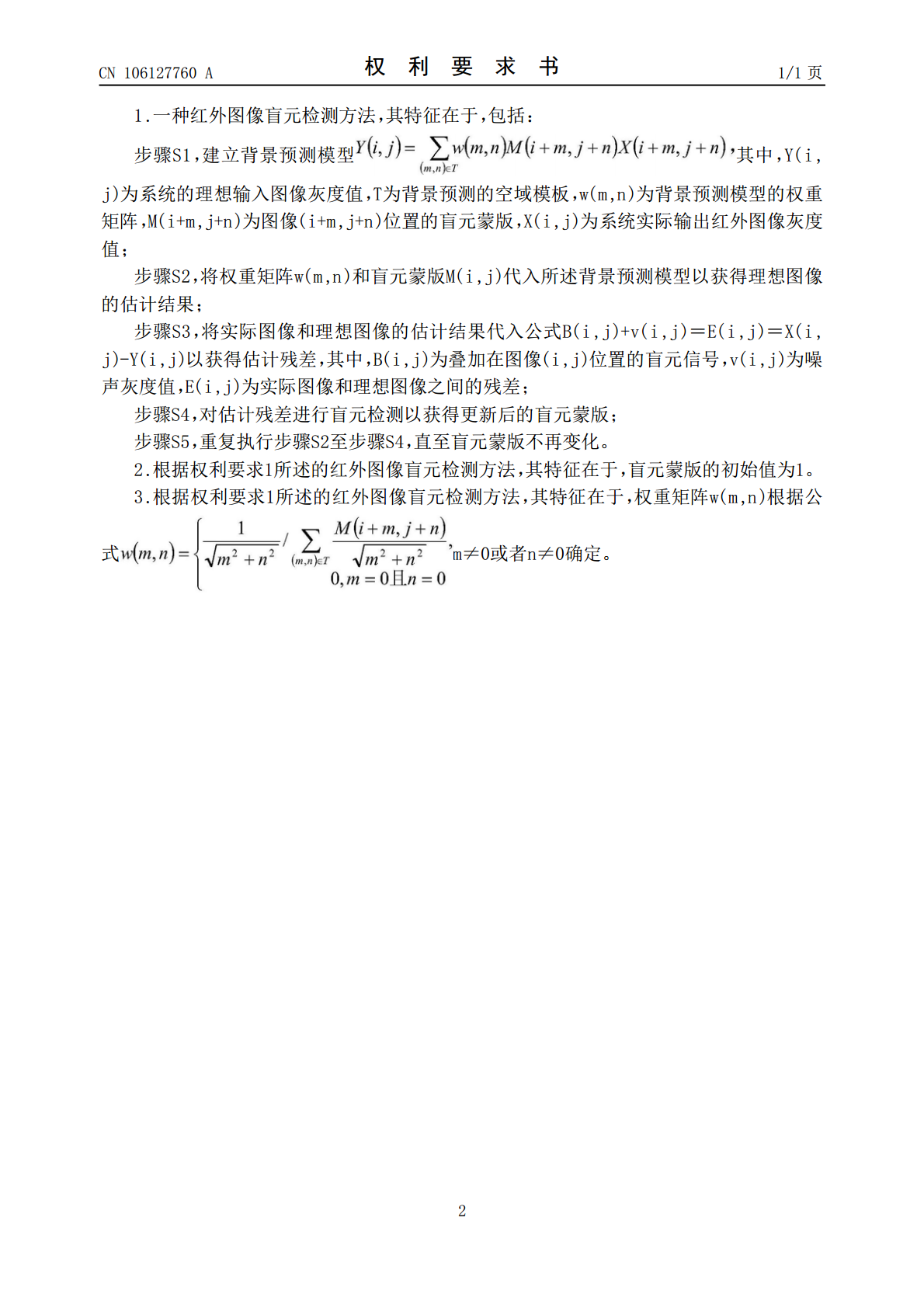
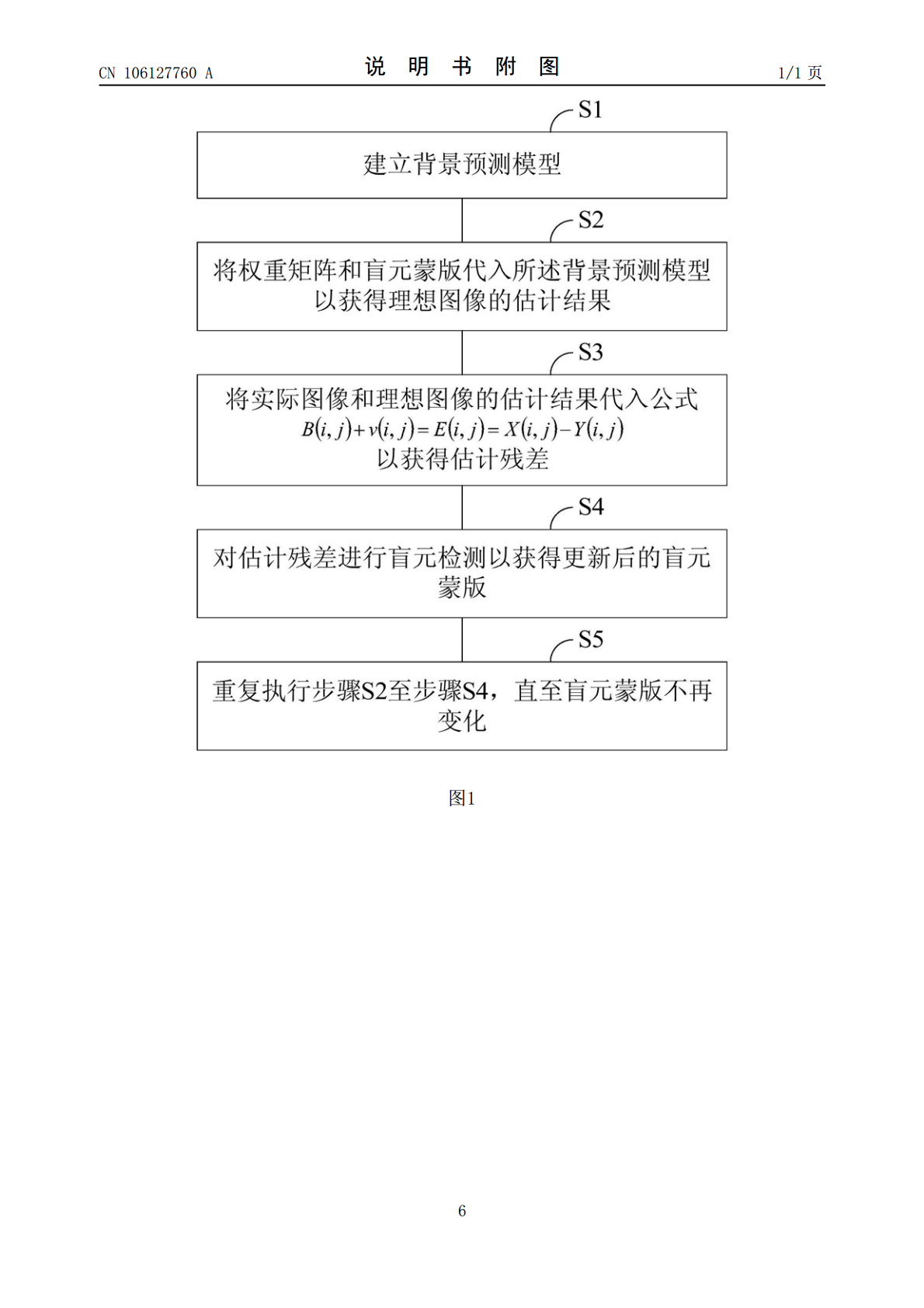
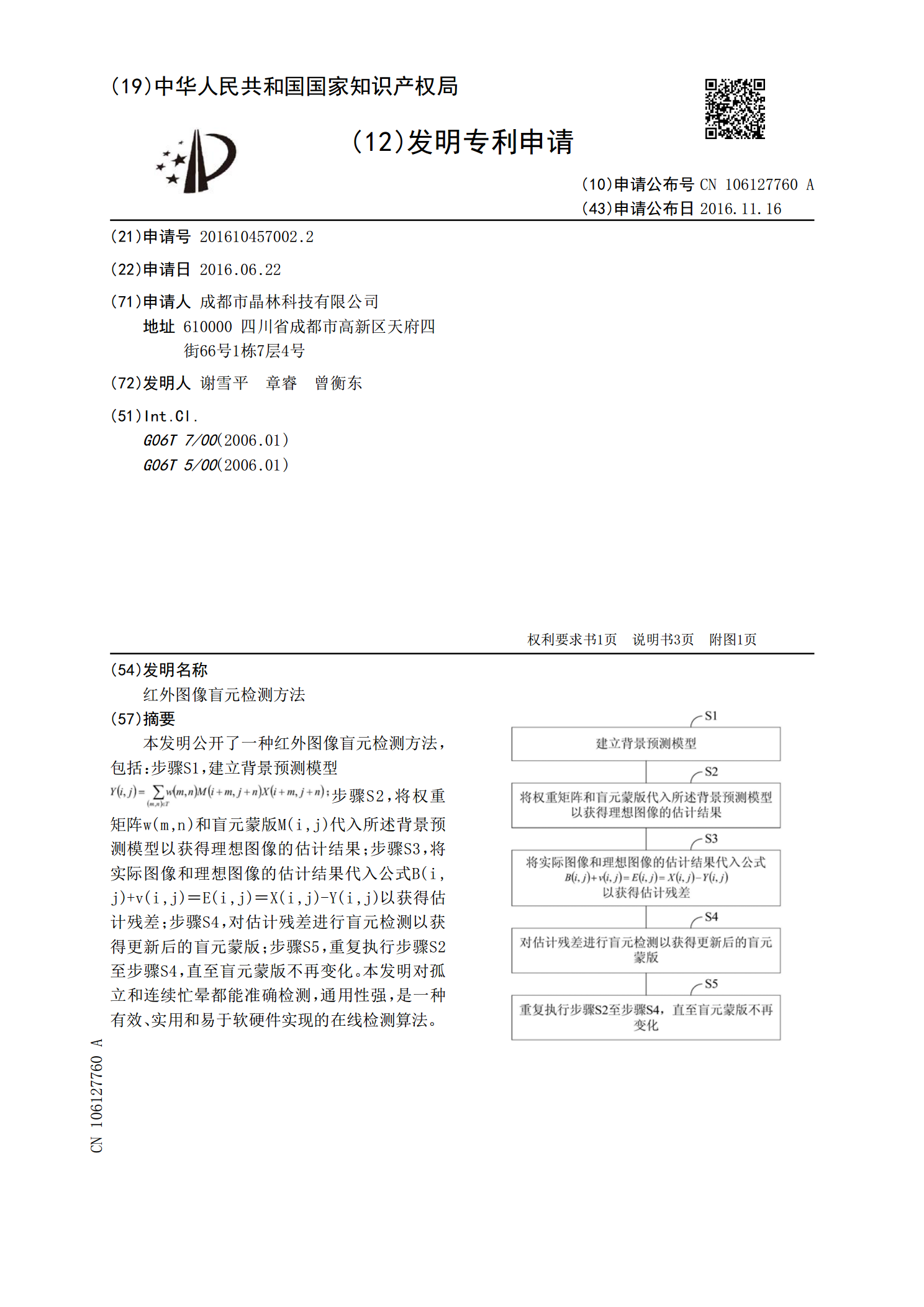
本发明公开了一种红外图像盲元检测方法,包括:步骤S1,建立背景预测模型
一种红外图像盲元检测方法.pdf
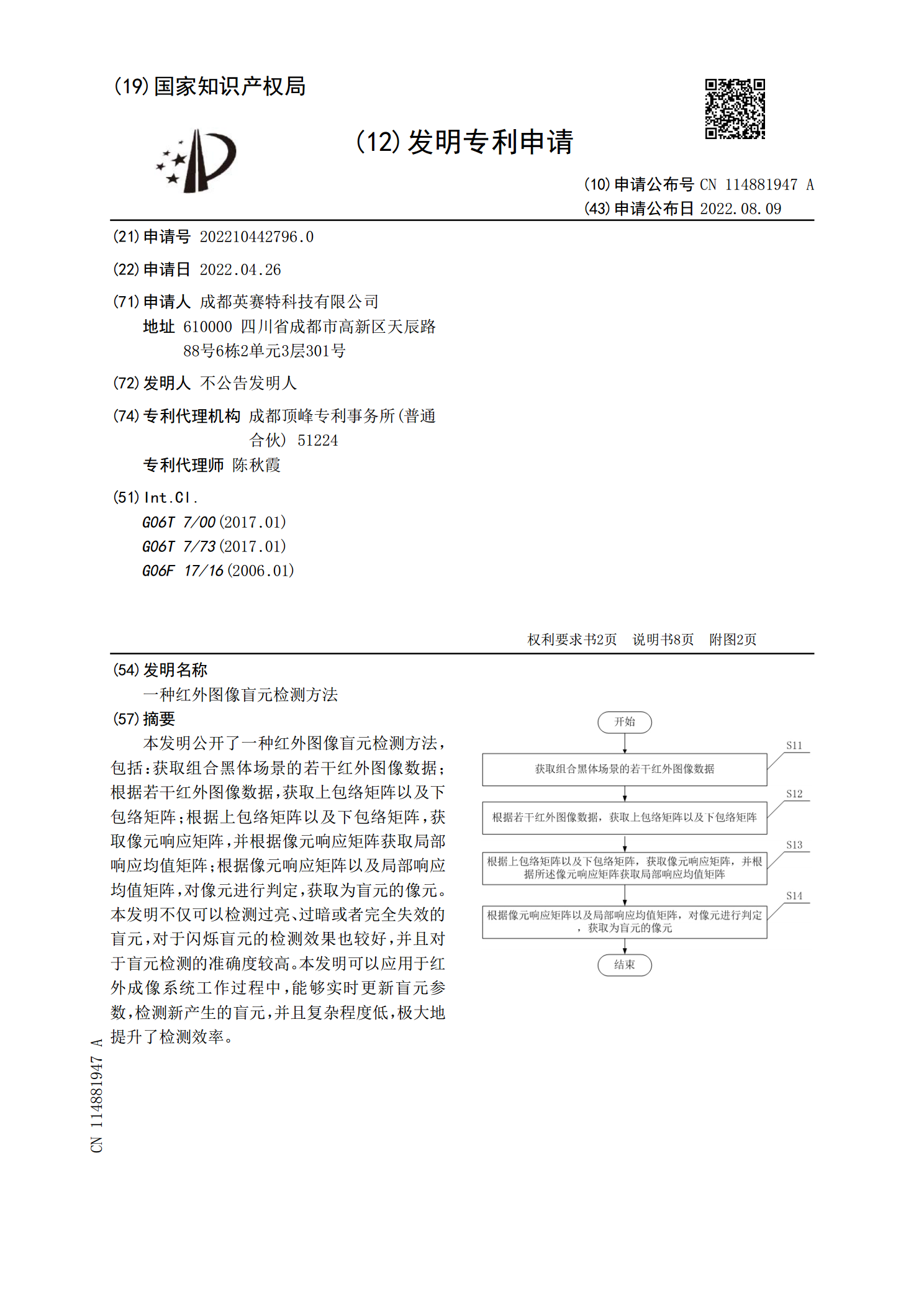
本发明公开了一种红外图像盲元检测方法,包括:获取组合黑体场景的若干红外图像数据;根据若干红外图像数据,获取上包络矩阵以及下包络矩阵;根据上包络矩阵以及下包络矩阵,获取像元响应矩阵,并根据像元响应矩阵获取局部响应均值矩阵;根据像元响应矩阵以及局部响应均值矩阵,对像元进行判定,获取为盲元的像元。本发明不仅可以检测过亮、过暗或者完全失效的盲元,对于闪烁盲元的检测效果也较好,并且对于盲元检测的准确度较高。本发明可以应用于红外成像系统工作过程中,能够实时更新盲元参数,检测新产生的盲元,并且复杂程度低,极大地提升了检
一种红外图像盲元检测方法.pdf
本发明属于红外热成像技术领域,公开了一种红外图像盲元检测方法,是基于Y16视频数据的盲元检测方法,其特征在于,其具体方法步骤如下:a.对黑体采集的Y16视频数据,计算出每个像元在时域内的最大值、最小值和均值,得到最大值矩阵、最小值矩阵和均值矩阵;b.计算每个像元最大值与均值的差、最小值与均值的差,在两者中选取最大差值与红外图像像元阈值进行比较,判断该像元是否是盲元;c.对均值矩阵局部加窗遍历,计算窗口内的标准差,检测步骤b未检测出的过亮或过暗像元;c.利用“3σ”原则判断当前像元是否为盲元,修改判断条件,
红外图像盲元处理方法及红外热像仪.pdf
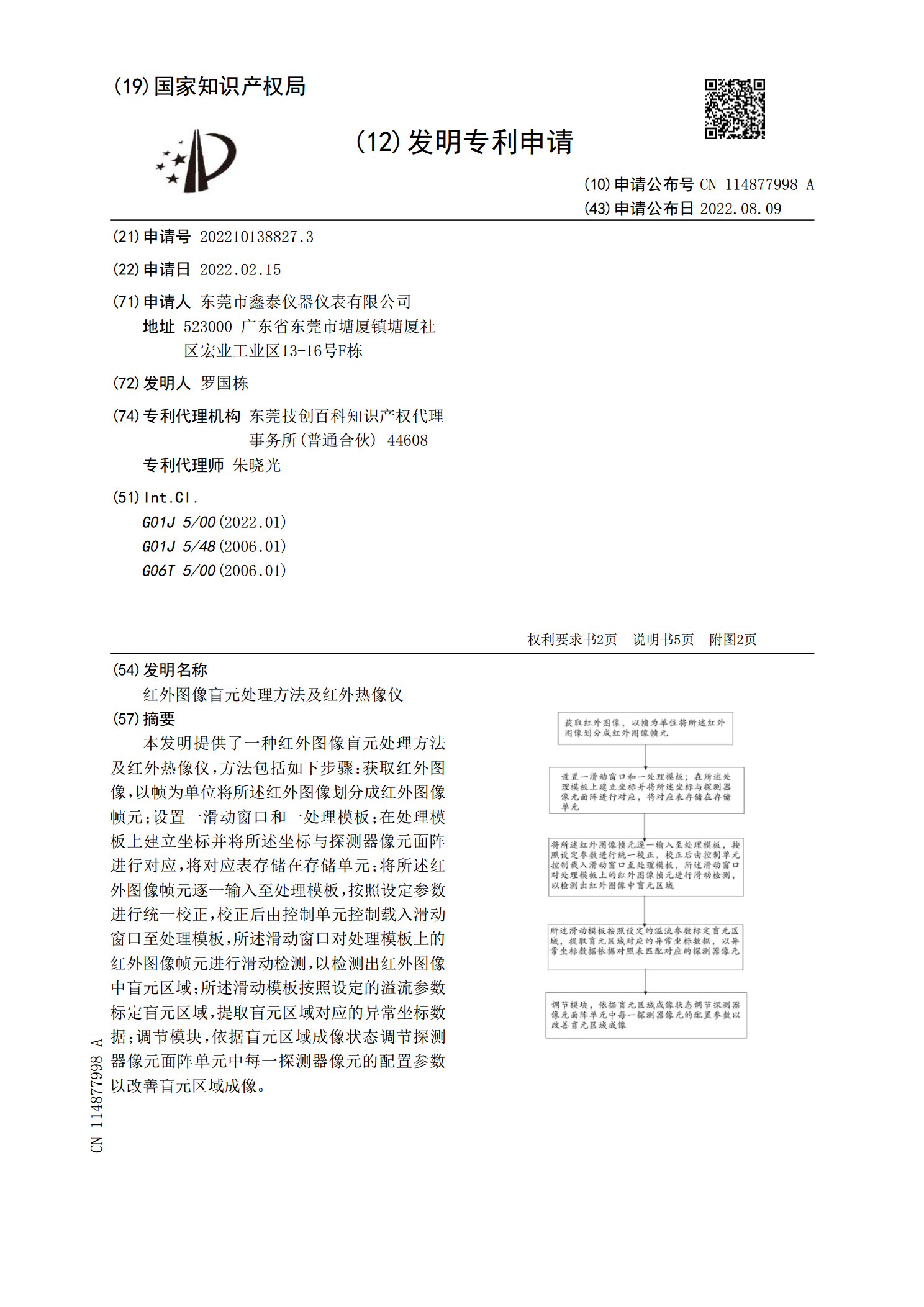
本发明提供了一种红外图像盲元处理方法及红外热像仪,方法包括如下步骤:获取红外图像,以帧为单位将所述红外图像划分成红外图像帧元;设置一滑动窗口和一处理模板;在处理模板上建立坐标并将所述坐标与探测器像元面阵进行对应,将对应表存储在存储单元;将所述红外图像帧元逐一输入至处理模板,按照设定参数进行统一校正,校正后由控制单元控制载入滑动窗口至处理模板,所述滑动窗口对处理模板上的红外图像帧元进行滑动检测,以检测出红外图像中盲元区域;所述滑动模板按照设定的溢流参数标定盲元区域,提取盲元区域对应的异常坐标数据;调节模块,
红外图像盲元矫正方法.pdf
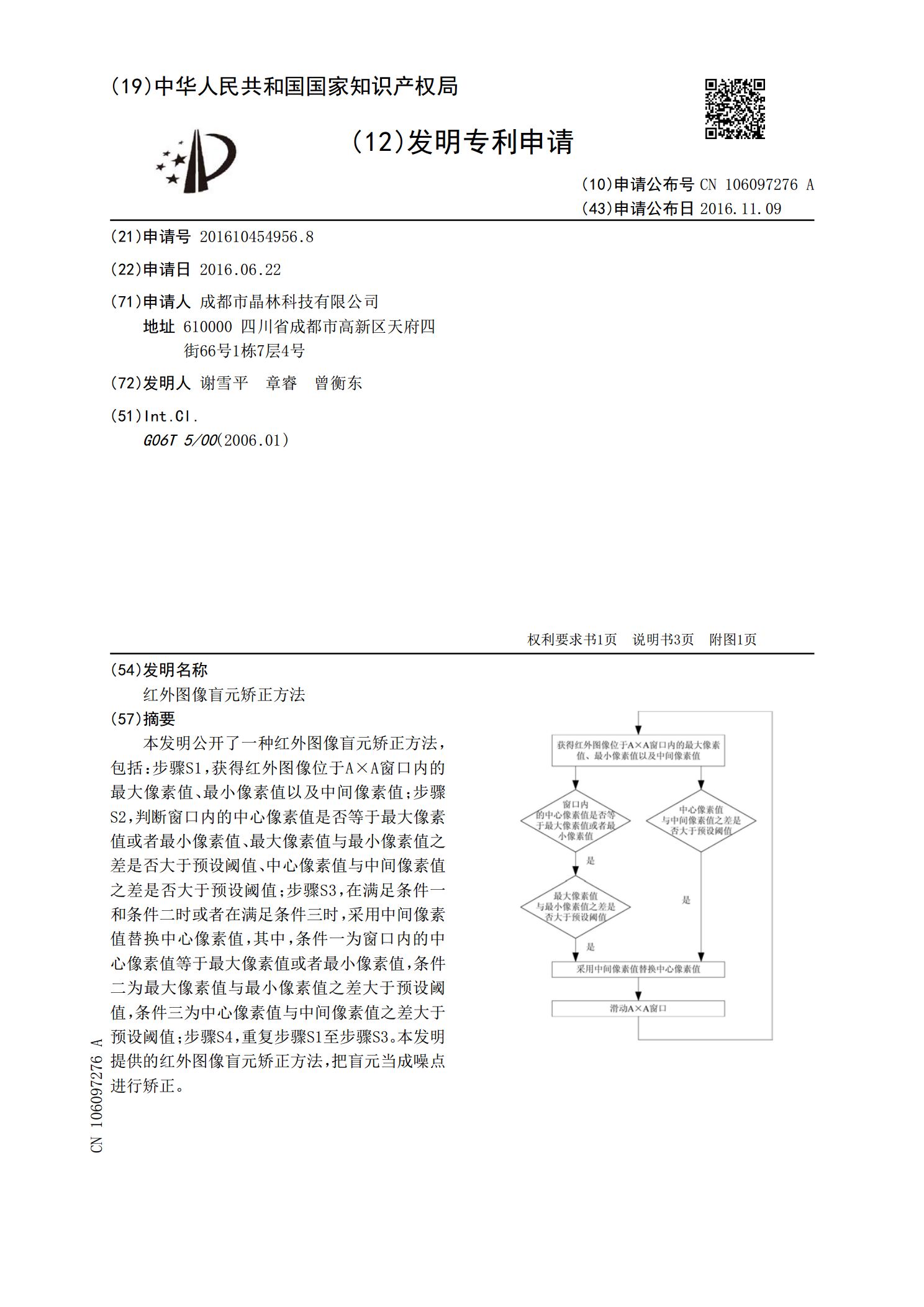
本发明公开了一种红外图像盲元矫正方法,包括:步骤S1,获得红外图像位于A×A窗口内的最大像素值、最小像素值以及中间像素值;步骤S2,判断窗口内的中心像素值是否等于最大像素值或者最小像素值、最大像素值与最小像素值之差是否大于预设阈值、中心像素值与中间像素值之差是否大于预设阈值;步骤S3,在满足条件一和条件二时或者在满足条件三时,采用中间像素值替换中心像素值,其中,条件一为窗口内的中心像素值等于最大像素值或者最小像素值,条件二为最大像素值与最小像素值之差大于预设阈值,条件三为中心像素值与中间像素值之差大于预设