
一种基于柔性铰链的Z向纳米位移定位平台.pdf

觅松****哥哥


1/8

2/8
3/8
4/8

5/8
6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于柔性铰链的Z向纳米位移定位平台.pdf
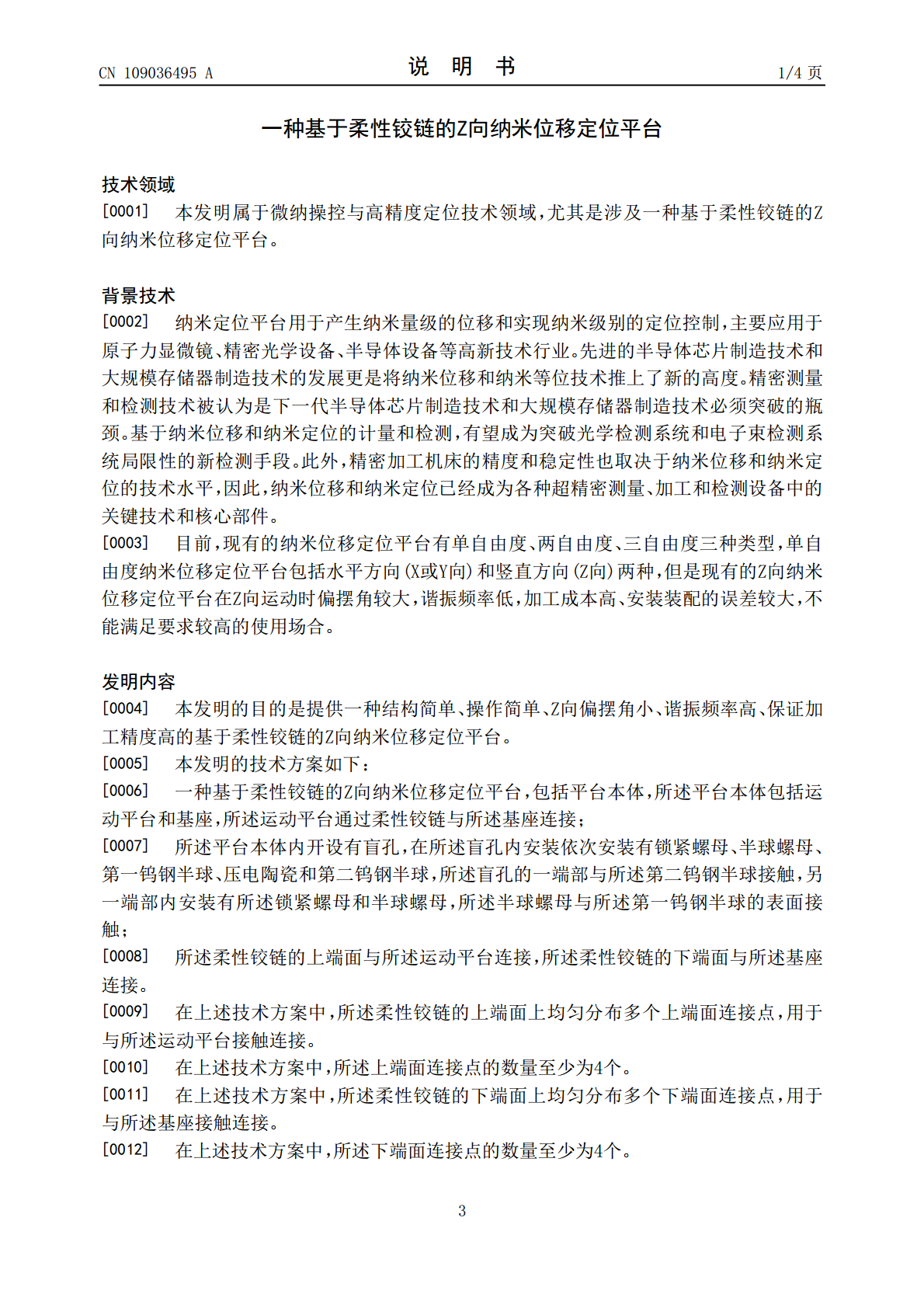
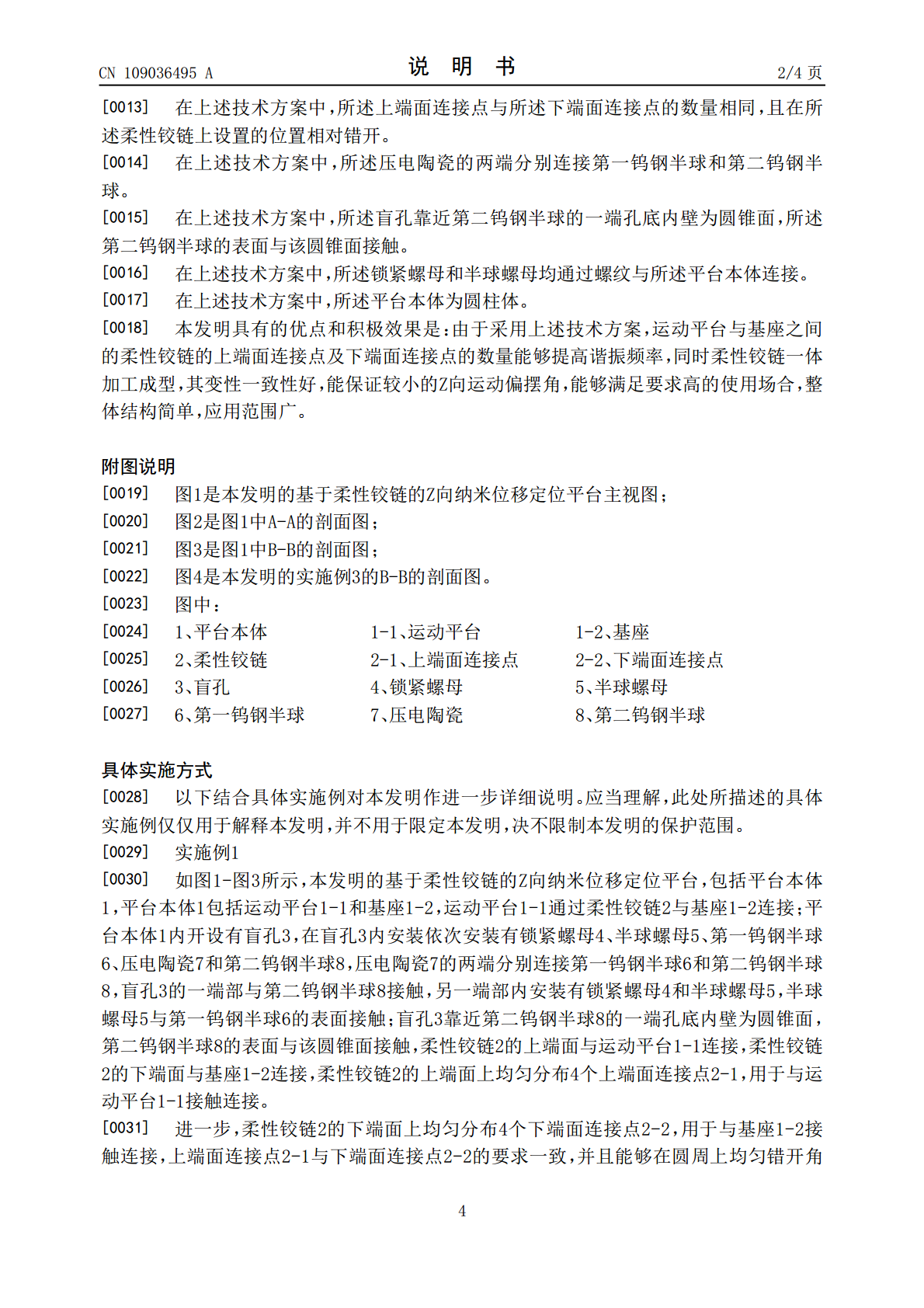
本发明公开了基于柔性铰链的Z向纳米位移定位平台,平台本体包括运动平台和基座,运动平台通过柔性铰链与基座连接;平台本体内开设有盲孔,在盲孔内安装依次安装有锁紧螺母、半球螺母、第一钨钢半球、压电陶瓷和第二钨钢半球,盲孔的一端部与第二钨钢半球接触,另一端部内安装有锁紧螺母和半球螺母,半球螺母与第一钨钢半球的表面接触;柔性铰链的上端面与运动平台连接,柔性铰链的下端面与基座连接。本发明的有益效果是运动平台与基座之间的柔性铰链的上端面连接点及下端面连接点的数量能够提高谐振频率,同时柔性铰链一体加工成型,其变性一致性好
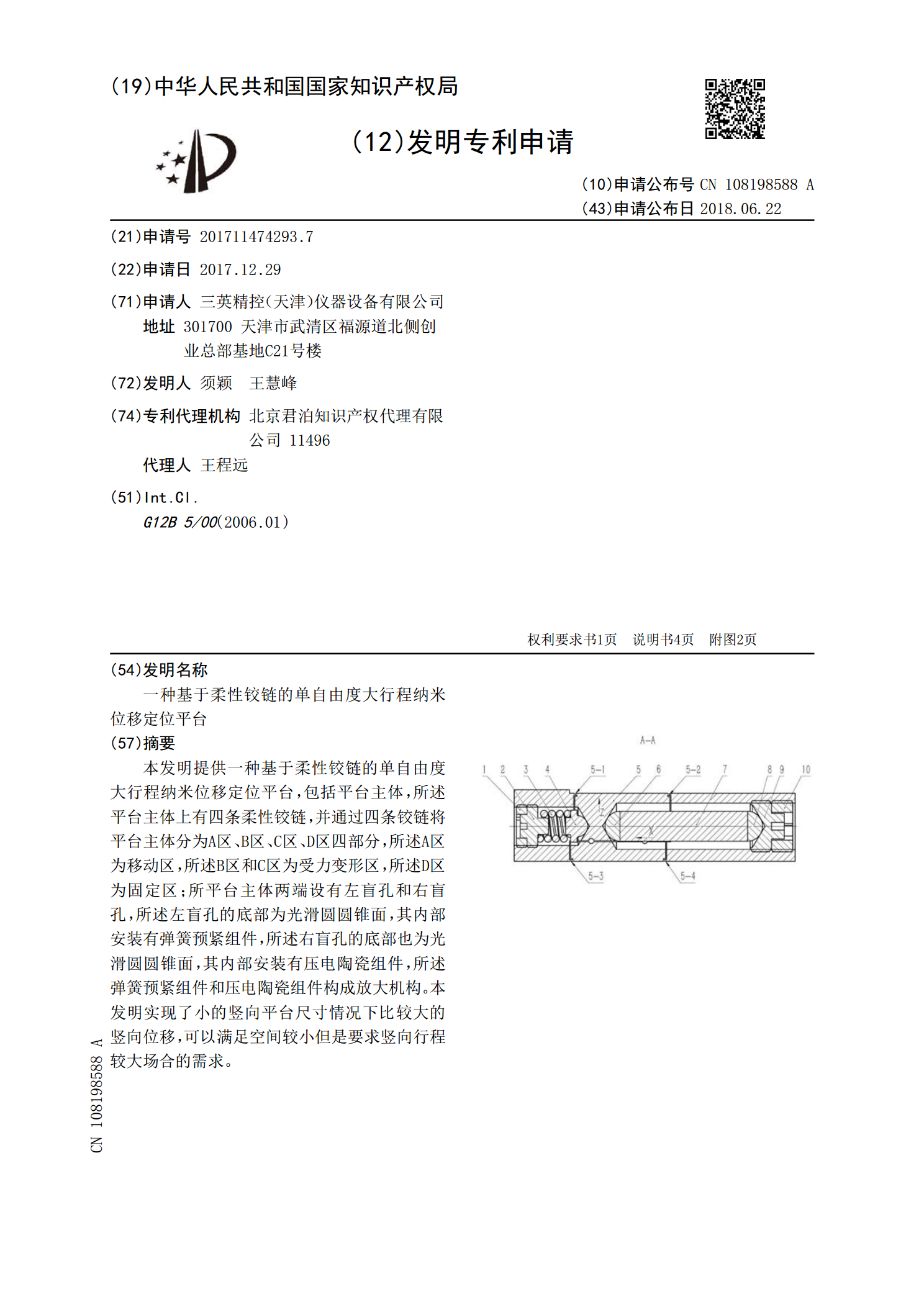
一种基于柔性铰链的单自由度大行程纳米位移定位平台.pdf
本发明提供一种基于柔性铰链的单自由度大行程纳米位移定位平台,包括平台主体,所述平台主体上有四条柔性铰链,并通过四条铰链将平台主体分为A区、B区、C区、D区四部分,所述A区为移动区,所述B区和C区为受力变形区,所述D区为固定区;所平台主体两端设有左盲孔和右盲孔,所述左盲孔的底部为光滑圆圆锥面,其内部安装有弹簧预紧组件,所述右盲孔的底部也为光滑圆圆锥面,其内部安装有压电陶瓷组件,所述弹簧预紧组件和压电陶瓷组件构成放大机构。本发明实现了小的竖向平台尺寸情况下比较大的竖向位移,可以满足空间较小但是要求竖向行程较大

基于蜂窝结构铰链的高精度Z向单自由度微定位平台.pdf
本发明公开了一种基于蜂窝结构铰链的高精度Z向单自由度微定位平台,包括蜂窝结构铰链支撑环,底座和压电陶瓷驱动器;所述蜂窝结构铰链支撑环包括位于其外围的外环、位于其中心的终端平台和介于外环与终端平台之间的蜂窝结构铰链,所述蜂窝结构铰链为由正六边形组成的蜂窝状结构;所述外环固定连接在所述底座上;所述压电陶瓷驱动器固定连接在所述底座内,所述终端平台的底部中心与所述压电陶瓷驱动器的顶端接触,由所述压电陶瓷驱动器产生Z向位移带动所述终端平台产生Z向位移。本发明采用基于仿生学原理设计的正六边形组成的蜂窝结构铰链,具有刚

基于交叉簧片柔性铰链的空间微位移机构.docx
基于交叉簧片柔性铰链的空间微位移机构交叉簧片柔性铰链的空间微位移机构摘要:现代机械工程的发展,对于机械构件的设计要求越来越高,需要更高的精度和更好的动态特性。此外,在一些需要机械转换的场合,要求转换的角度准确且可控。交叉簧片柔性铰链是一种具有优良动态特性和微位移功能的机构。本文探讨了交叉簧片柔性铰链的基本结构、特性和应用,以及未来的发展方向。关键字:机构、交叉簧片、柔性铰链、微位移一、引言交叉簧片柔性铰链是一种独特的机构,近年来被广泛应用于机械工程领域。该机构能够实现高精度的微位移,并且具有优秀的动态特性
一种全柔性铰链微位移放大机构.pdf
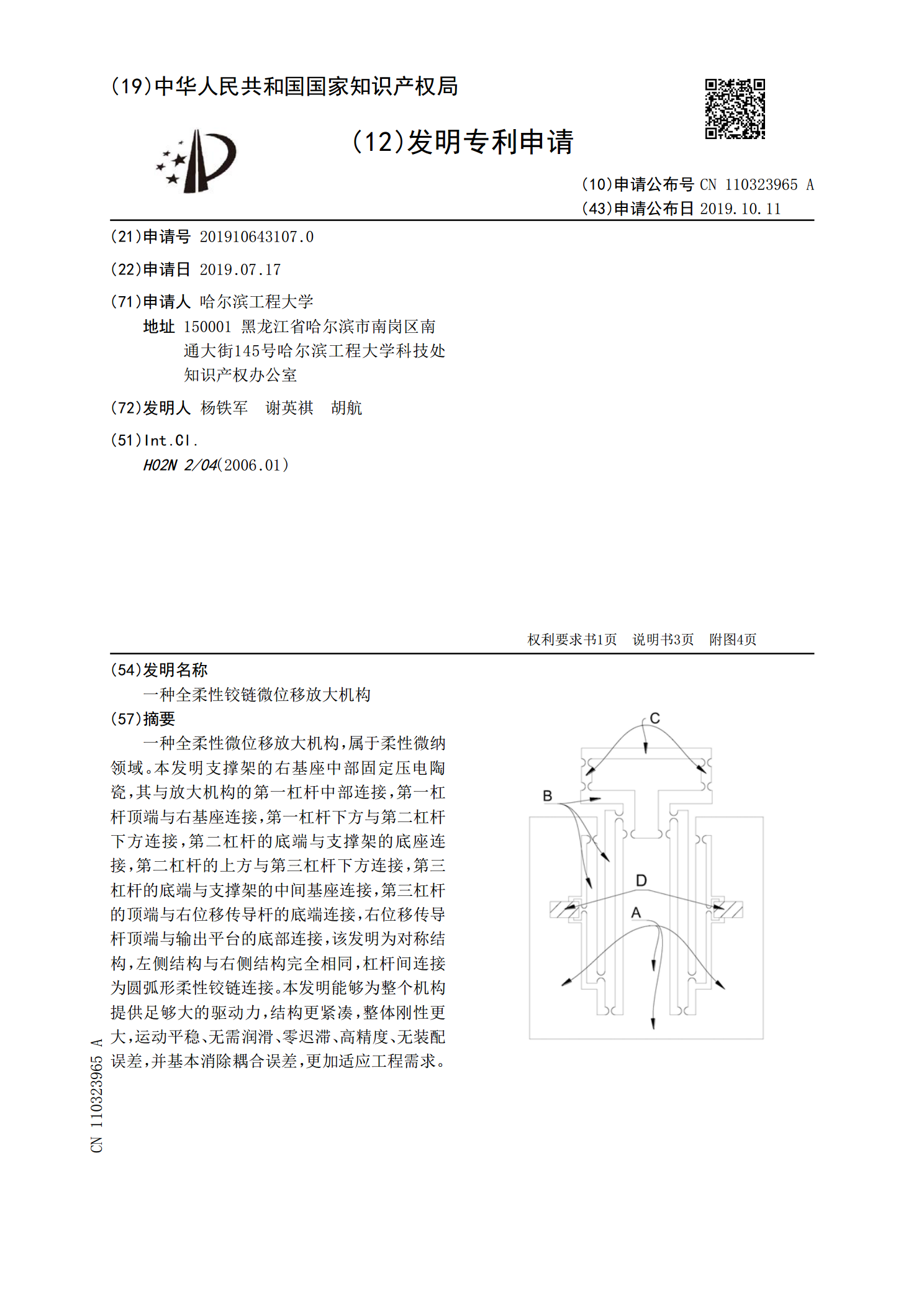
一种全柔性微位移放大机构,属于柔性微纳领域。本发明支撑架的右基座中部固定压电陶瓷,其与放大机构的第一杠杆中部连接,第一杠杆顶端与右基座连接,第一杠杆下方与第二杠杆下方连接,第二杠杆的底端与支撑架的底座连接,第二杠杆的上方与第三杠杆下方连接,第三杠杆的底端与支撑架的中间基座连接,第三杠杆的顶端与右位移传导杆的底端连接,右位移传导杆顶端与输出平台的底部连接,该发明为对称结构,左侧结构与右侧结构完全相同,杠杆间连接为圆弧形柔性铰链连接。本发明能够为整个机构提供足够大的驱动力,结构更紧凑,整体刚性更大,运动平稳、