
基于交叉簧片柔性铰链的空间微位移机构.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于交叉簧片柔性铰链的空间微位移机构.docx
基于交叉簧片柔性铰链的空间微位移机构交叉簧片柔性铰链的空间微位移机构摘要:现代机械工程的发展,对于机械构件的设计要求越来越高,需要更高的精度和更好的动态特性。此外,在一些需要机械转换的场合,要求转换的角度准确且可控。交叉簧片柔性铰链是一种具有优良动态特性和微位移功能的机构。本文探讨了交叉簧片柔性铰链的基本结构、特性和应用,以及未来的发展方向。关键字:机构、交叉簧片、柔性铰链、微位移一、引言交叉簧片柔性铰链是一种独特的机构,近年来被广泛应用于机械工程领域。该机构能够实现高精度的微位移,并且具有优秀的动态特性

交叉簧片柔性铰链的翘曲分析与消除.docx
交叉簧片柔性铰链的翘曲分析与消除摘要:本文主要介绍了交叉簧片柔性铰链的翘曲问题及其消除方法。首先,从交叉簧片柔性铰链的结构和工作原理入手,分析其中出现翘曲的原因。接着,结合数学模型对翘曲进行分析和计算。最后,提出了消除翘曲的方法,包括改进结构和加强材料等方面。1.交叉簧片柔性铰链的结构和工作原理交叉簧片柔性铰链是一种常见的机械连接件,通常由两个相交的簧片组成,其中一个簧片上有一些凸起的节点,另一个簧片上有一些凹槽,当两个簧片相互扣合时即可形成铰链。相对于传统的机械铰链,交叉簧片柔性铰链具有简单、轻量、刚度
一种全柔性铰链微位移放大机构.pdf
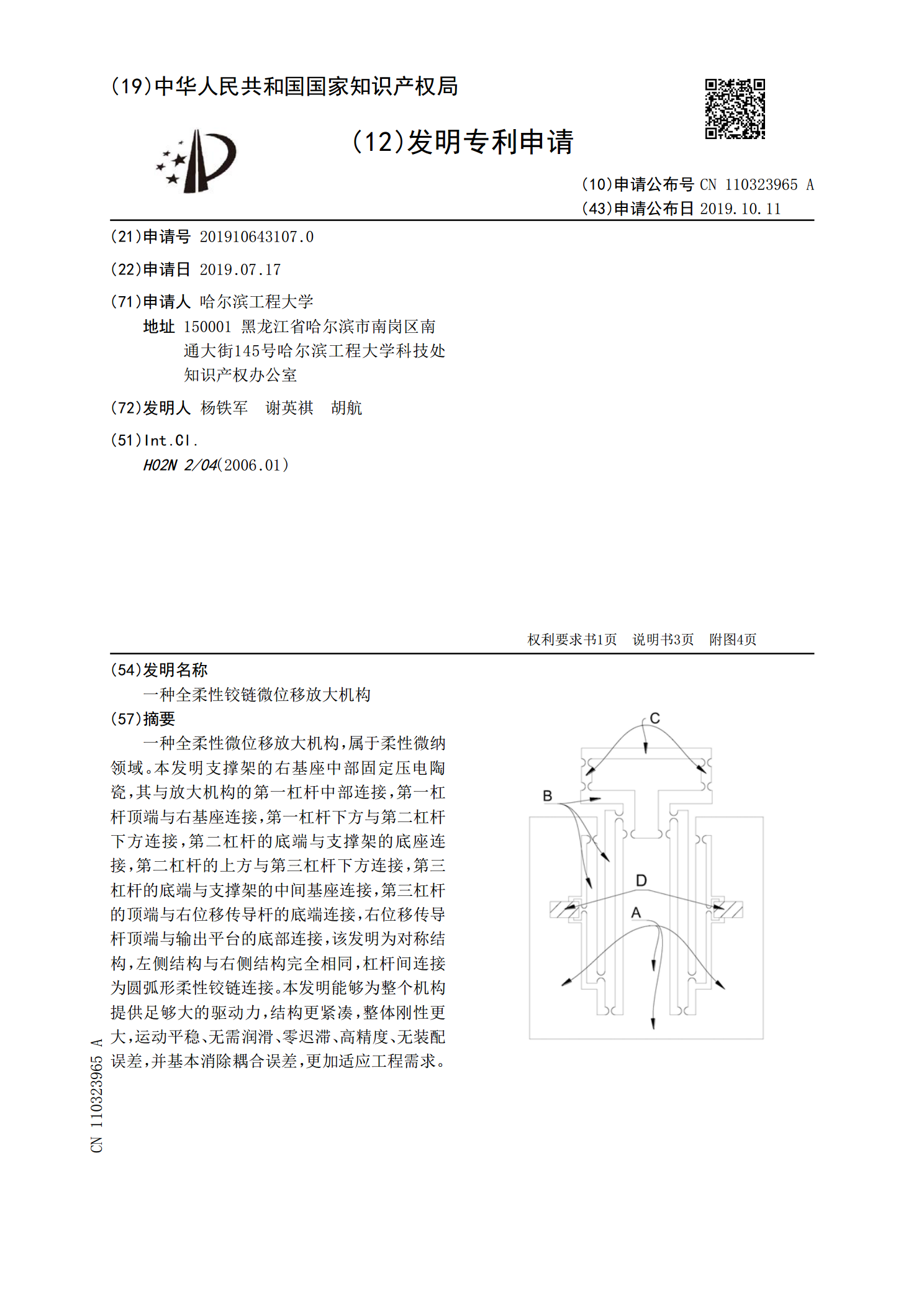
一种全柔性微位移放大机构,属于柔性微纳领域。本发明支撑架的右基座中部固定压电陶瓷,其与放大机构的第一杠杆中部连接,第一杠杆顶端与右基座连接,第一杠杆下方与第二杠杆下方连接,第二杠杆的底端与支撑架的底座连接,第二杠杆的上方与第三杠杆下方连接,第三杠杆的底端与支撑架的中间基座连接,第三杠杆的顶端与右位移传导杆的底端连接,右位移传导杆顶端与输出平台的底部连接,该发明为对称结构,左侧结构与右侧结构完全相同,杠杆间连接为圆弧形柔性铰链连接。本发明能够为整个机构提供足够大的驱动力,结构更紧凑,整体刚性更大,运动平稳、

基于柔性铰链型位移放大机构的高速喷射点胶头研究的任务书.docx
基于柔性铰链型位移放大机构的高速喷射点胶头研究的任务书任务书1.背景及研究意义高速点胶技术在电子制造、汽车、航空航天、医疗器械等领域发挥着重要的作用。点胶头是点胶机器人系统中的重要组成部分,其精度、速度、效率和可靠性均关系到整个点胶系统的性能。目前市场上常见的点胶头主要有针头式点胶头和喷射式点胶头。相比较而言,喷射式点胶头更适用于快速、高效、大规模的生产线,其主要机理是利用空气压力将胶水从喷嘴中喷出,同时,精准控制喷嘴的运动轨迹,使胶水喷到所需要的位置上。当前,许多高速点胶机器人系统还存在许多问题。例如,

基于GMM和柔性铰链的大位移微致动器设计与研究的开题报告.docx
基于GMM和柔性铰链的大位移微致动器设计与研究的开题报告开题报告一、选题背景大位移微致动器是一种应用广泛的精密驱动器件,它广泛应用于精密仪器、光学透镜、医疗器械、半导体制造、机器人和航空航天等领域。与传统的微致动器相比,大位移微致动器具有更高的位移精度和更大的运动范围。针对其在工业和科研领域的广泛应用,对其进行研究和开发具有重要意义。目前,大位移微致动器的设计和研究主要基于两种方法:GMM(广义矩方法)和柔性铰链方法。其中,GMM方法是通过将大位移微致动器的位移方程转化为广义矩求解的方法,实现对其性能的分