
一种全柔性铰链微位移放大机构.pdf

Jo****63

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种全柔性铰链微位移放大机构.pdf
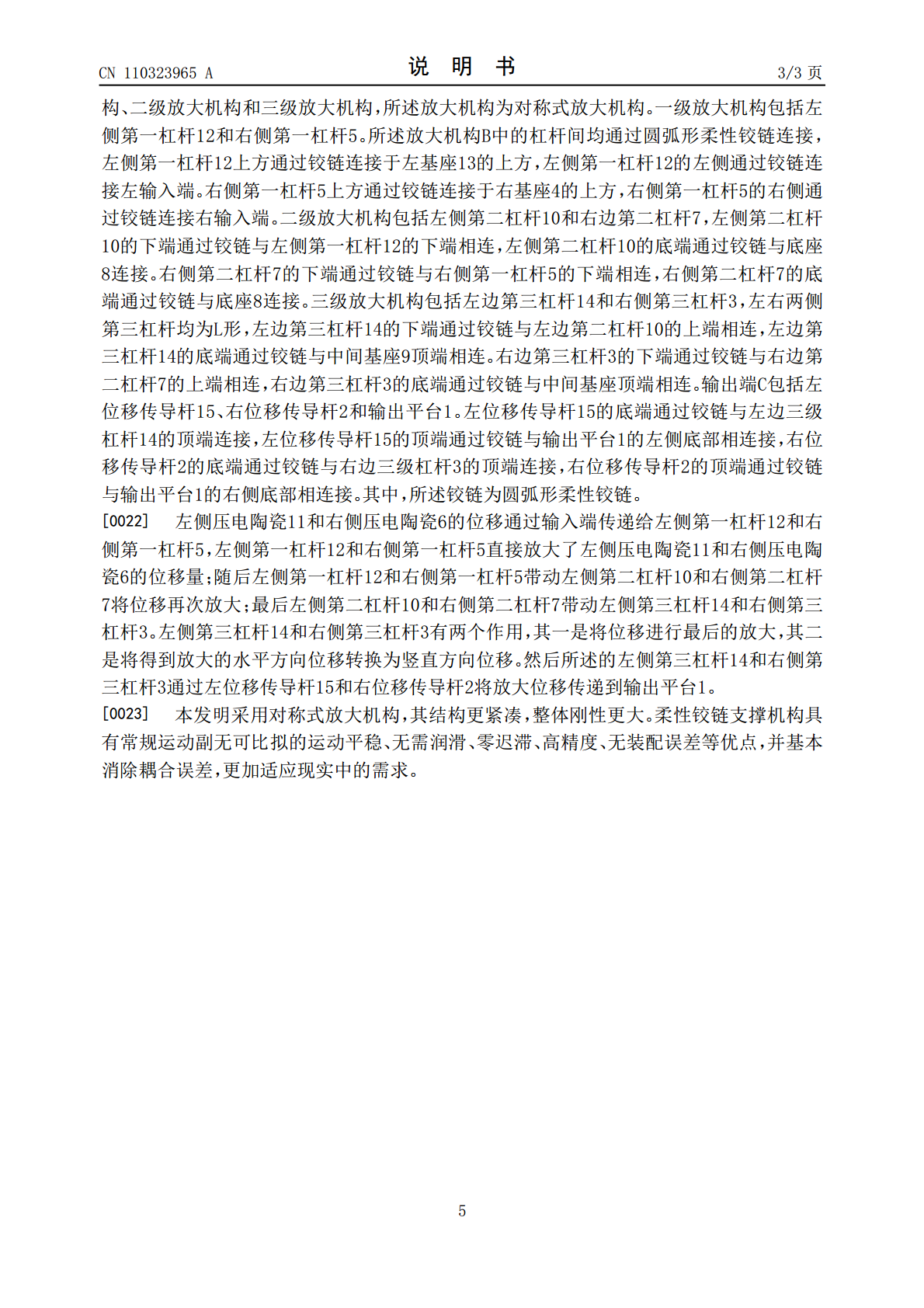
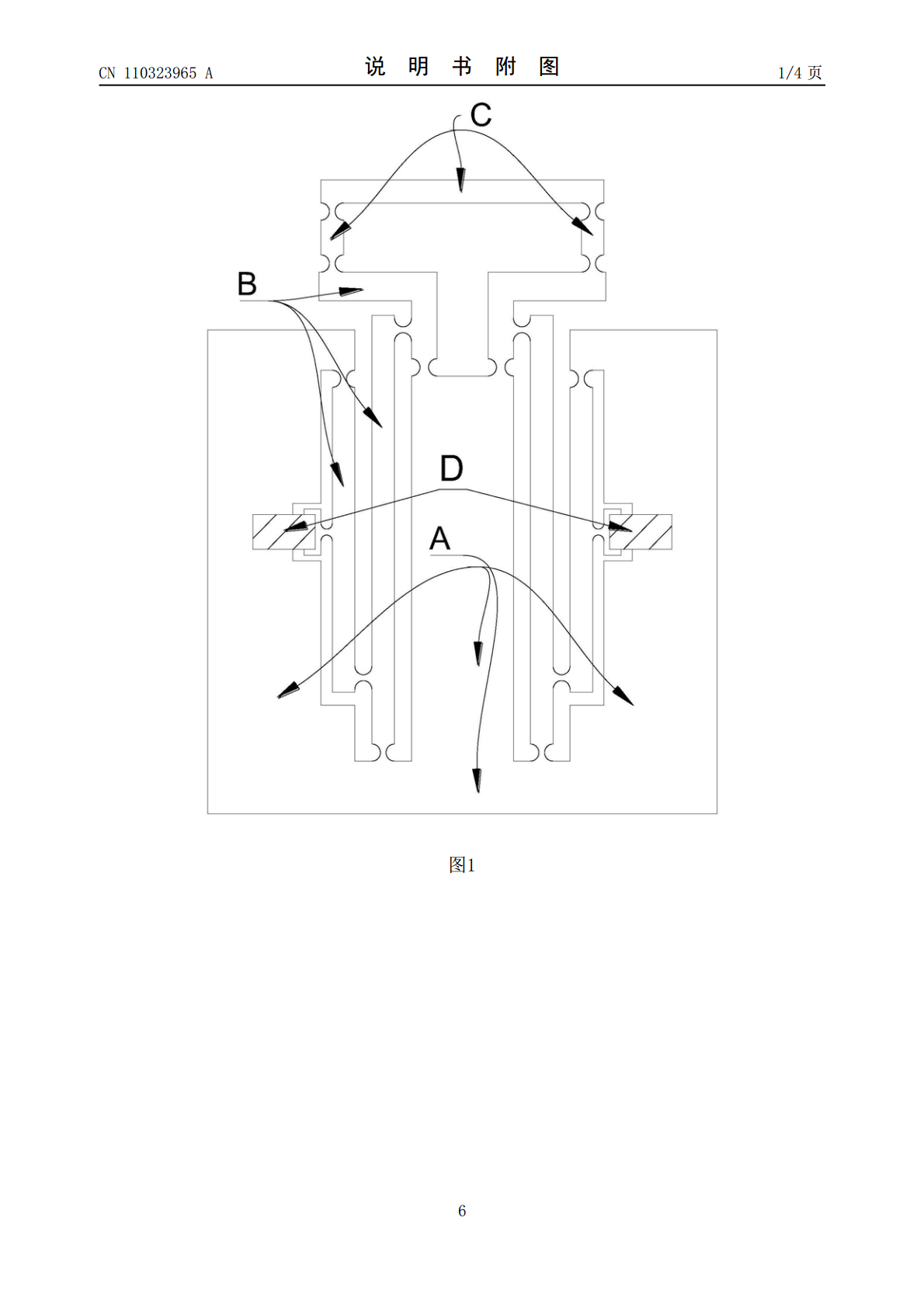
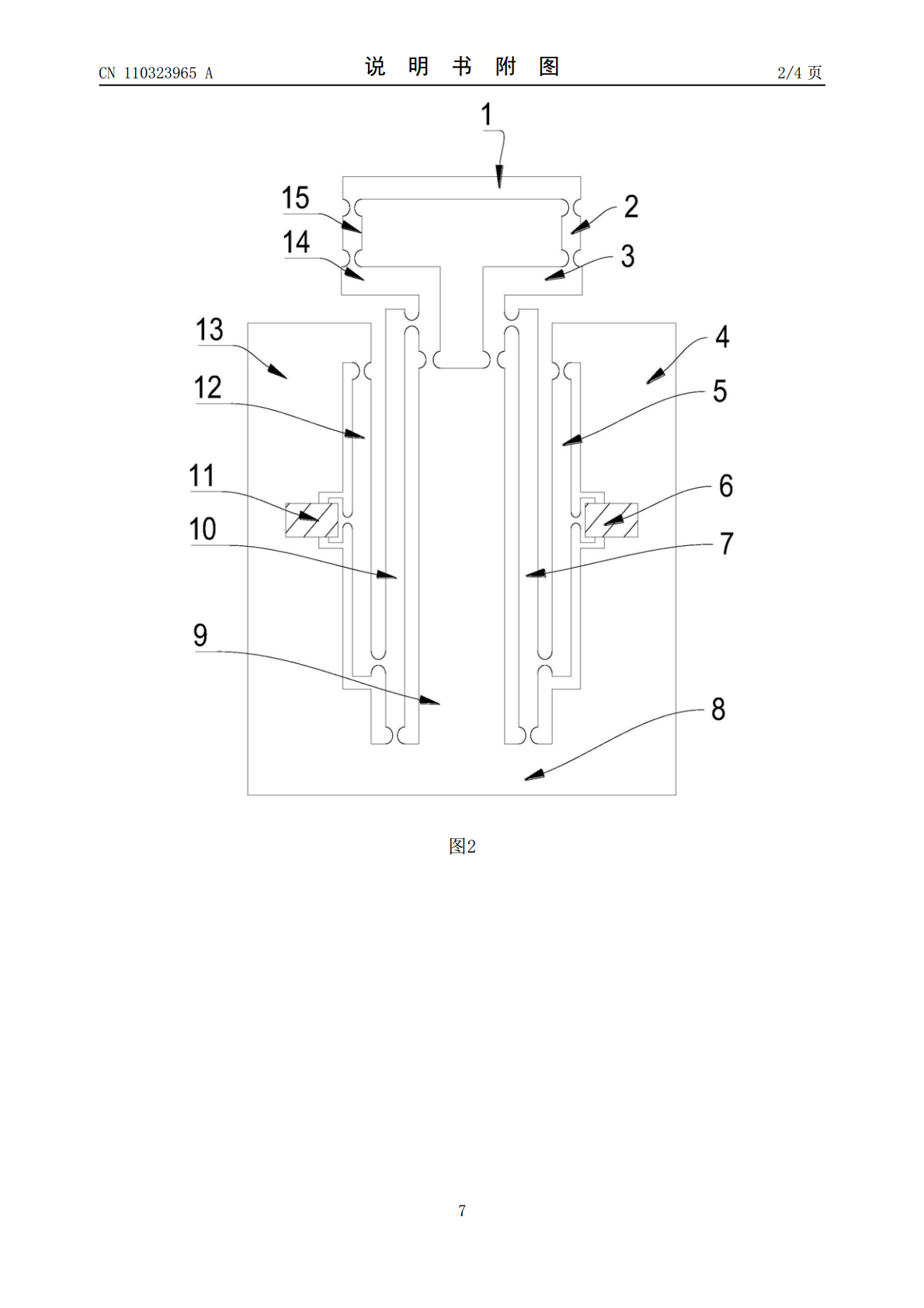
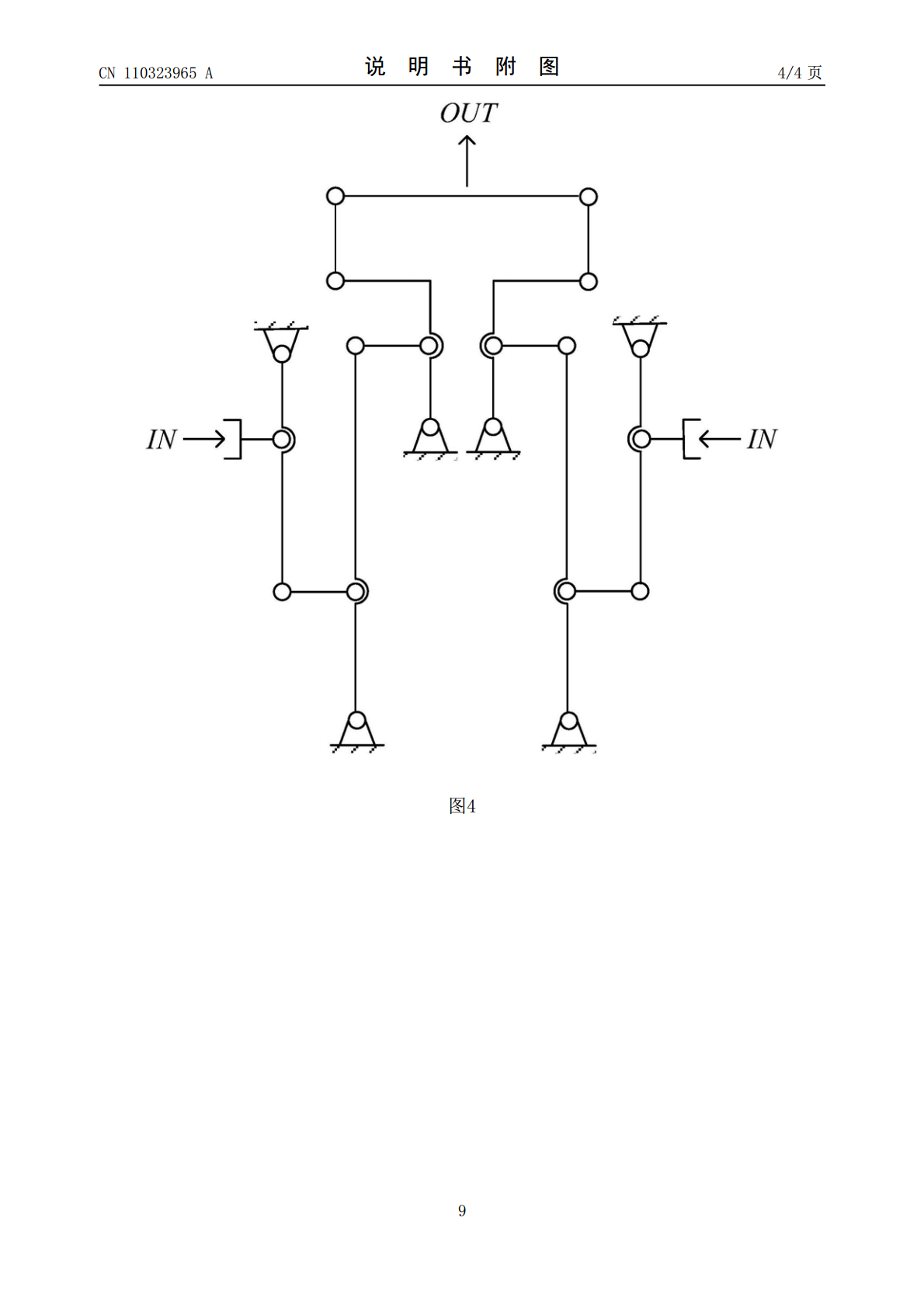
一种全柔性微位移放大机构,属于柔性微纳领域。本发明支撑架的右基座中部固定压电陶瓷,其与放大机构的第一杠杆中部连接,第一杠杆顶端与右基座连接,第一杠杆下方与第二杠杆下方连接,第二杠杆的底端与支撑架的底座连接,第二杠杆的上方与第三杠杆下方连接,第三杠杆的底端与支撑架的中间基座连接,第三杠杆的顶端与右位移传导杆的底端连接,右位移传导杆顶端与输出平台的底部连接,该发明为对称结构,左侧结构与右侧结构完全相同,杠杆间连接为圆弧形柔性铰链连接。本发明能够为整个机构提供足够大的驱动力,结构更紧凑,整体刚性更大,运动平稳、

全柔性微位移放大机构的设计与分析.docx
全柔性微位移放大机构的设计与分析全柔性微位移放大机构的设计与分析摘要:本论文介绍了一种全柔性微位移放大机构的设计与分析。该机构借助柔性结构进行位移放大,并采用了新型的传感器和控制算法,实现精确的位移控制。论文对机构的设计、优化和实验结果进行了详细的阐述,并分析了机构的性能和优缺点。关键词:微位移放大机构,柔性结构,传感器,控制算法,性能分析。1.研究背景在现代工业领域,微位移传感和控制技术已经成为一个热门的研究方向。然而,由于传感器的灵敏度和控制系统的稳定性限制,微位移控制技术难以实现高精度、高速、稳定性

基于交叉簧片柔性铰链的空间微位移机构.docx
基于交叉簧片柔性铰链的空间微位移机构交叉簧片柔性铰链的空间微位移机构摘要:现代机械工程的发展,对于机械构件的设计要求越来越高,需要更高的精度和更好的动态特性。此外,在一些需要机械转换的场合,要求转换的角度准确且可控。交叉簧片柔性铰链是一种具有优良动态特性和微位移功能的机构。本文探讨了交叉簧片柔性铰链的基本结构、特性和应用,以及未来的发展方向。关键字:机构、交叉簧片、柔性铰链、微位移一、引言交叉簧片柔性铰链是一种独特的机构,近年来被广泛应用于机械工程领域。该机构能够实现高精度的微位移,并且具有优秀的动态特性

微位移机构中变截面柔性铰链等效刚度的求解方法研究.docx
微位移机构中变截面柔性铰链等效刚度的求解方法研究随着微型机械技术的快速发展,微位移机构的应用越来越广泛。微位移机构是指能够实现微小位移的结构,其应用范围涉及机器人、医疗器械、光学器件等多个领域。变截面柔性铰链是微位移机构中常用的一种机构,其具有重量轻、体积小、可重复性好等优点。然而,变截面柔性铰链的等效刚度的求解一直是研究重点之一。变截面柔性铰链由一系列杆件和节杆组成,节杆上的柔性铰链可以实现微小位移。在应用中,需要对其进行力学分析,以确定其等效刚度。本文旨在探讨变截面柔性铰链等效刚度的求解方法。首先,需

一种基于柔性铰链技术的微型放大机构研究.docx
一种基于柔性铰链技术的微型放大机构研究Title:ResearchonMiniatureAmplificationMechanismbasedonFlexureHingeTechnologyAbstract:Inrecentyears,thedemandforminiatureamplificationmechanismshasincreasedduetotheadvancementofmicrosystemsandtheneedforprecisionapplicationsinvariousfield