
管道缺陷检测方法及装置.pdf

冬易****娘子

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
管道缺陷检测方法及装置.pdf
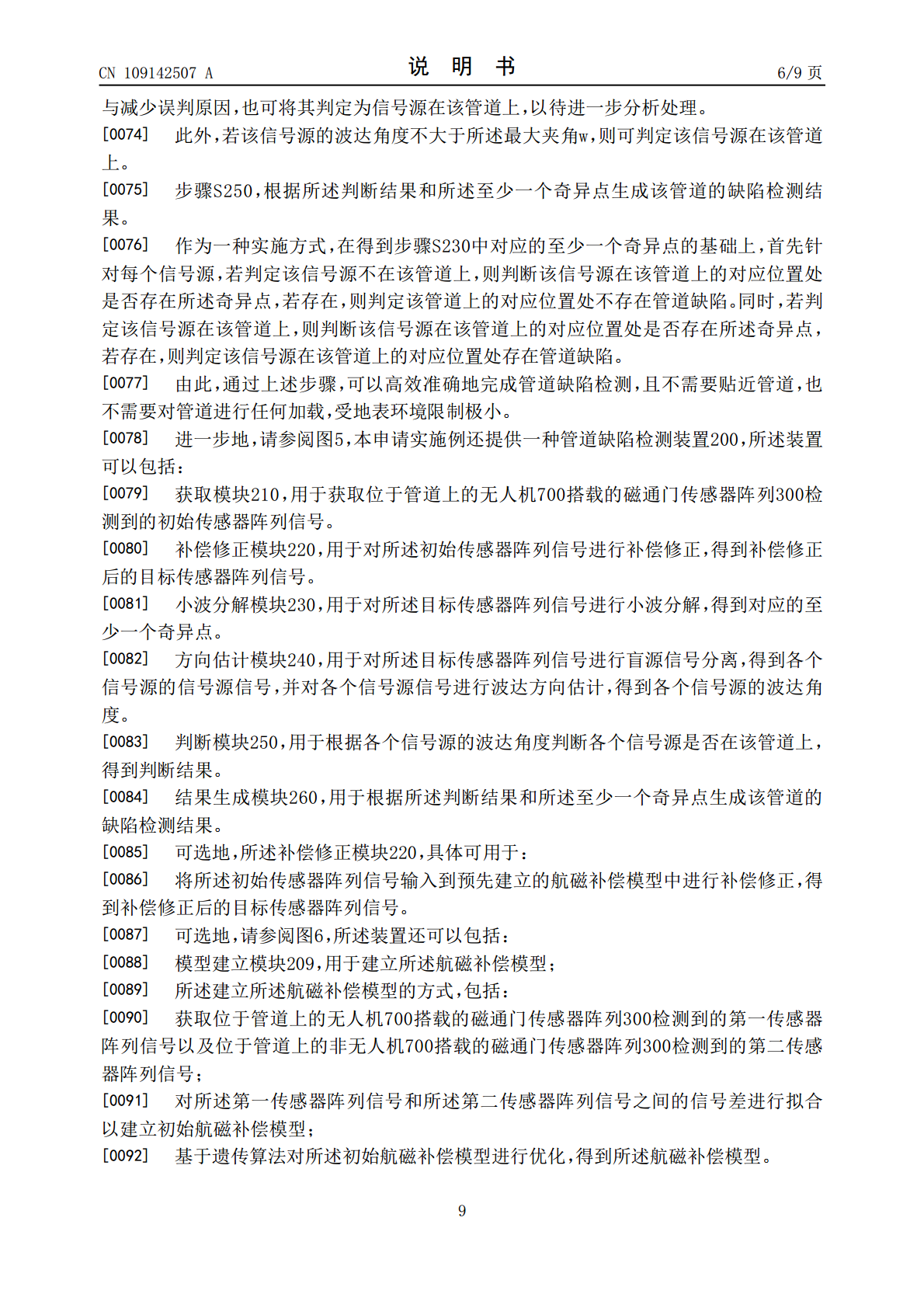
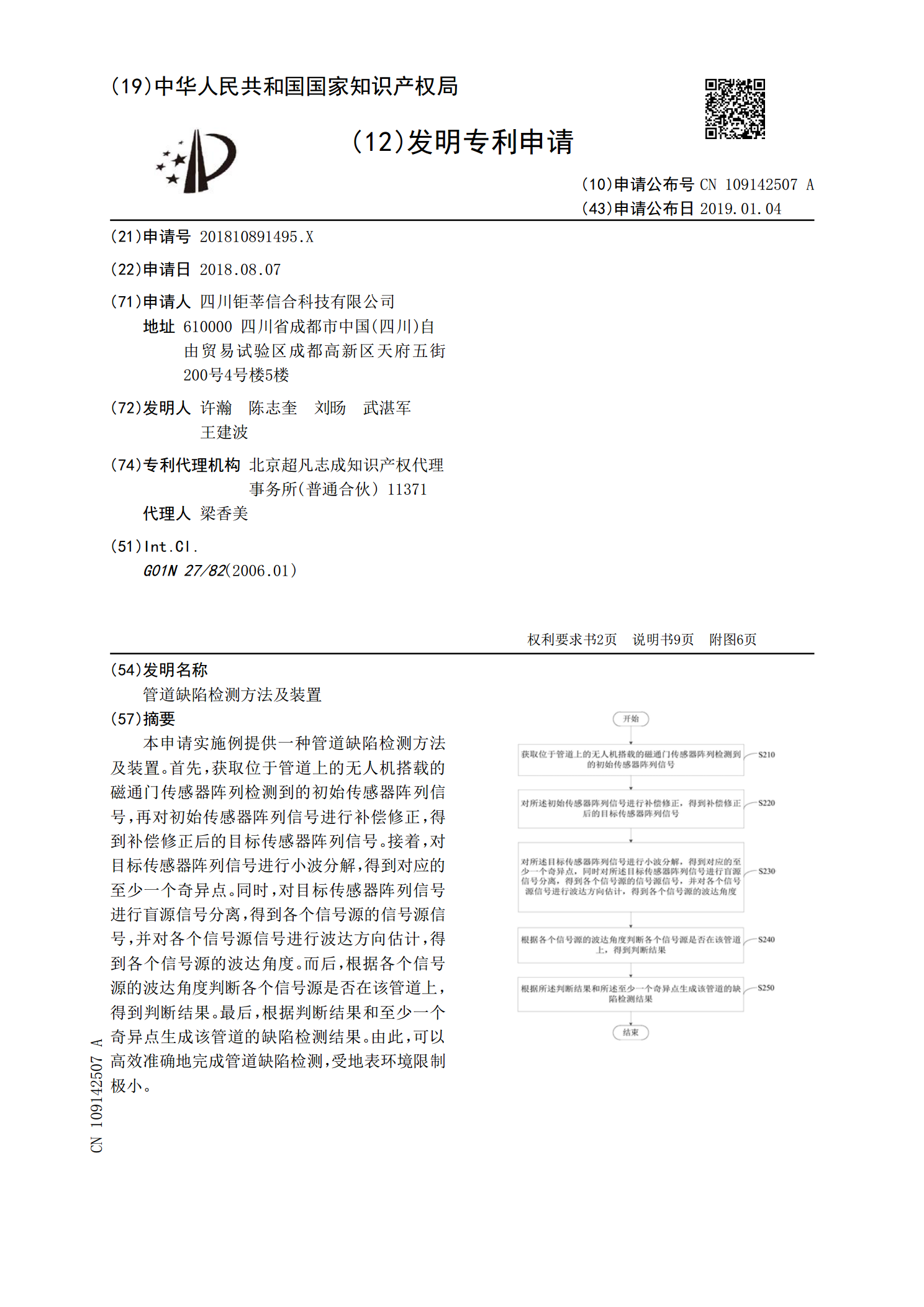
本申请实施例提供一种管道缺陷检测方法及装置。首先,获取位于管道上的无人机搭载的磁通门传感器阵列检测到的初始传感器阵列信号,再对初始传感器阵列信号进行补偿修正,得到补偿修正后的目标传感器阵列信号。接着,对目标传感器阵列信号进行小波分解,得到对应的至少一个奇异点。同时,对目标传感器阵列信号进行盲源信号分离,得到各个信号源的信号源信号,并对各个信号源信号进行波达方向估计,得到各个信号源的波达角度。而后,根据各个信号源的波达角度判断各个信号源是否在该管道上,得到判断结果。最后,根据判断结果和至少一个奇异点生成该管
管道缺陷多维检测装置.pdf
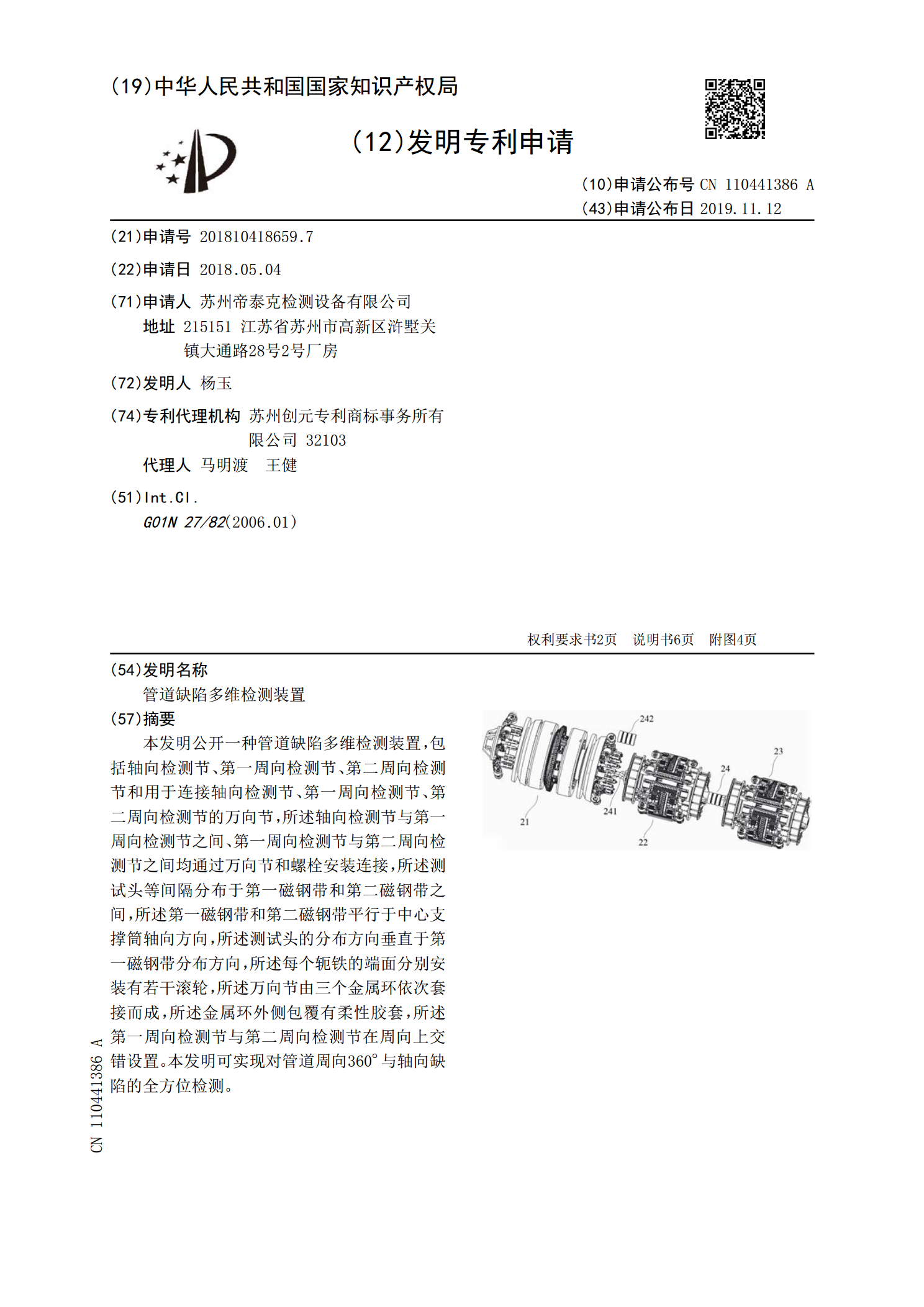
本发明公开一种管道缺陷多维检测装置,包括轴向检测节、第一周向检测节、第二周向检测节和用于连接轴向检测节、第一周向检测节、第二周向检测节的万向节,所述轴向检测节与第一周向检测节之间、第一周向检测节与第二周向检测节之间均通过万向节和螺栓安装连接,所述测试头等间隔分布于第一磁钢带和第二磁钢带之间,所述第一磁钢带和第二磁钢带平行于中心支撑筒轴向方向,所述测试头的分布方向垂直于第一磁钢带分布方向,所述每个轭铁的端面分别安装有若干滚轮,所述万向节由三个金属环依次套接而成,所述金属环外侧包覆有柔性胶套,所述第一周向检测

管道焊缝缺陷检测方法、装置、系统及存储介质.pdf
本申请涉及一种管道焊缝缺陷检测方法、装置、系统及存储介质。其中,管道焊缝缺陷检测方法获取各焊缝图像;分别对各焊缝图像进行预处理,得到各焊缝目标区域图像;对各焊缝目标区域图像进行数据增强处理,得到焊缝缺陷数据集;标注焊缝缺陷数据集中图像的缺陷部位,得到焊缝缺陷训练集;采用焊缝缺陷训练集对目标检测模型进行训练,得到缺陷检测模型;采用缺陷检测模型对待测焊缝图像进行图像匹配,输出检测结果。对焊缝图像进行预处理,能够较好的保留了图像纹理细节。通过对各焊缝目标区域图像进行数据增强处理,使得本申请焊缝缺陷数据集的样本数

缺陷检测装置及缺陷检测方法.pdf
本发明提供一种缺陷检测装置和缺陷检测方法。所述缺陷检测装置中,照明光学系统形成照射到基片上的激光光束且该激光光束被反射,当激光光束照射到残留物时,在残留物的上表面和下表面分别进行反射而形成相干光;成像系统对从基片反射的光进行成像,形成检测图像,其中,相干光成像后对应于检测图像中的干涉条纹,通过干涉条纹获得残留物的信息。利用上述装置可以降低残留物的检测难度,提高缺陷的检出率。所述缺陷检测方法中,形成照射到基片上的激光光束且激光光束被反射,对从基片反射的光进行成像形成检测图像,其中,通过检测图像中的干涉条纹获
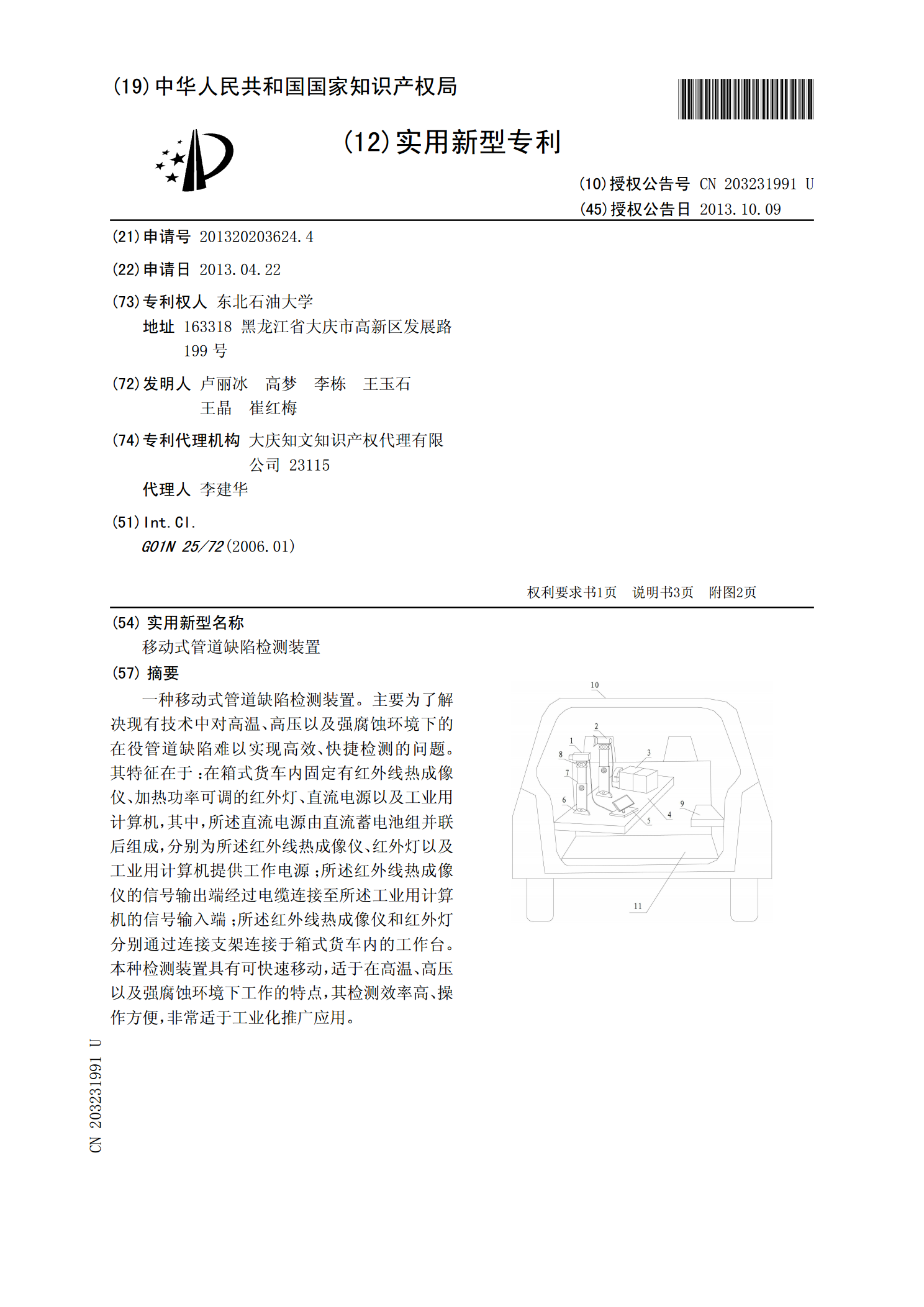
移动式管道缺陷检测装置.pdf
一种移动式管道缺陷检测装置。主要为了解决现有技术中对高温、高压以及强腐蚀环境下的在役管道缺陷难以实现高效、快捷检测的问题。其特征在于:在箱式货车内固定有红外线热成像仪、加热功率可调的红外灯、直流电源以及工业用计算机,其中,所述直流电源由直流蓄电池组并联后组成,分别为所述红外线热成像仪、红外灯以及工业用计算机提供工作电源;所述红外线热成像仪的信号输出端经过电缆连接至所述工业用计算机的信号输入端;所述红外线热成像仪和红外灯分别通过连接支架连接于箱式货车内的工作台。本种检测装置具有可快速移动,适于在高温、高压以