
盲点监测系统的控制方法.pdf

邻家****mk

1/8

2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
盲点监测系统的控制方法.pdf
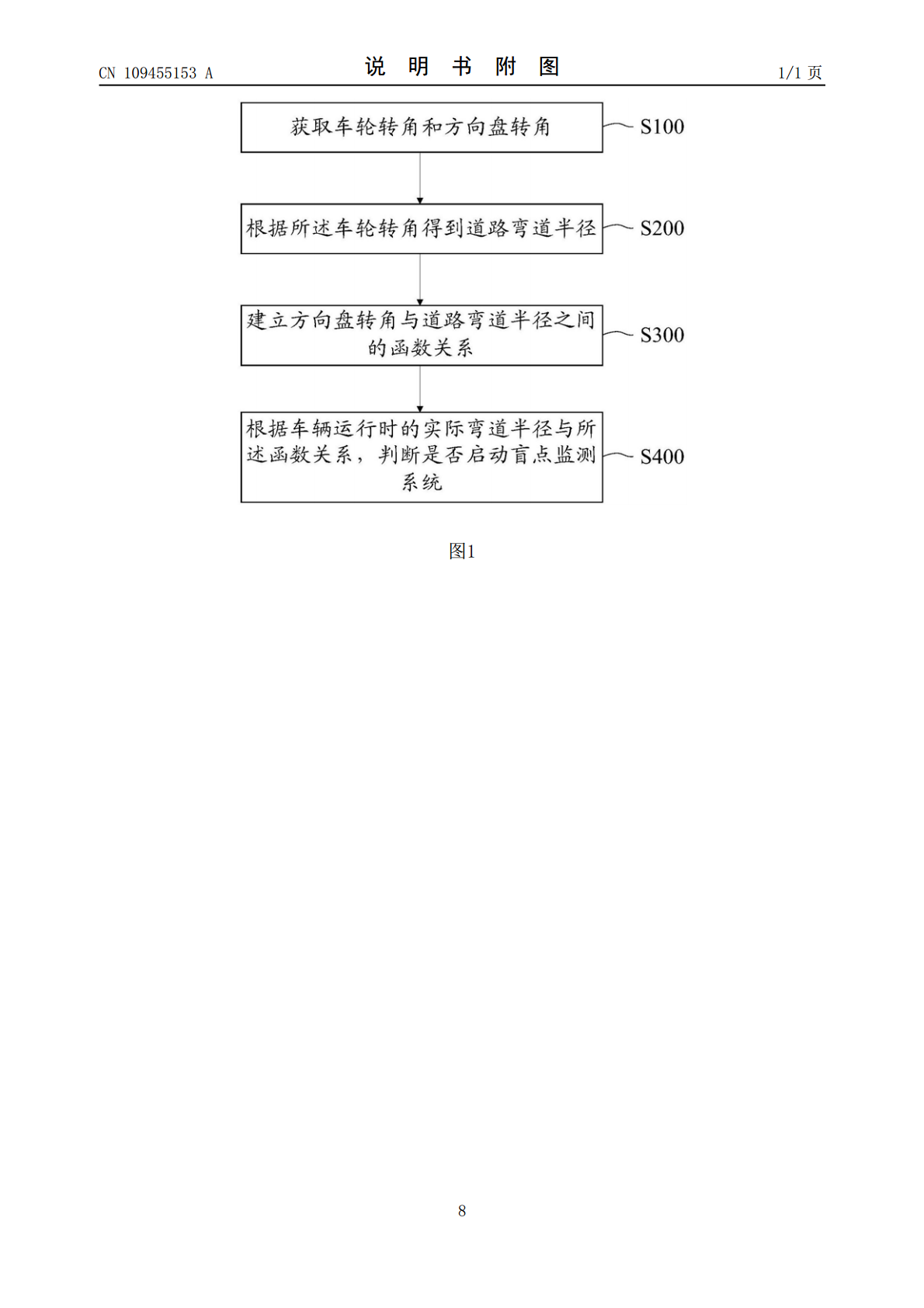
本发明公开了一种盲点监测系统的控制方法,包括:获取车轮转角和方向盘转角;根据所述车轮转角得到道路弯道半径;建立方向盘转角与道路弯道半径之间的函数关系;根据车辆运行时的实际弯道半径与所述函数关系,判断是否启动盲点监测系统。本发明提供的盲点监测系统的控制方法,利用车轮转角得到道路弯道半径,通过阿克曼几何模型建立前轮转角与弯道转弯半径关系,然后通过前轮转角模型与方向盘转角建立相应的动力学模型,最后通过整车试验校验动力学模型准确性。通过此方法无需通过摄像头识别车道线来识别转弯半径,即节约了研发成本,又避免因为光线
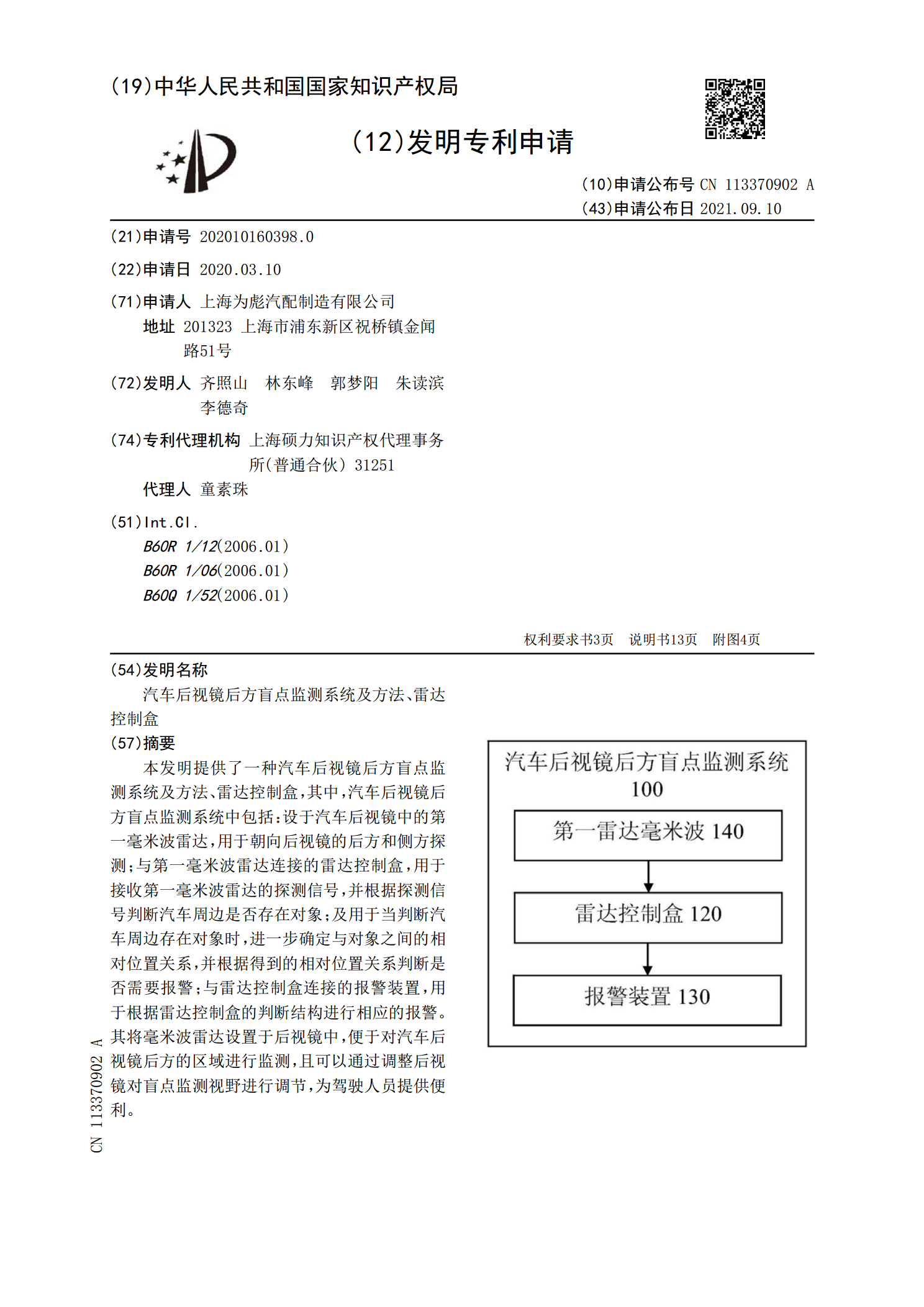
汽车后视镜后方盲点监测系统及方法、雷达控制盒.pdf
本发明提供了一种汽车后视镜后方盲点监测系统及方法、雷达控制盒,其中,汽车后视镜后方盲点监测系统中包括:设于汽车后视镜中的第一毫米波雷达,用于朝向后视镜的后方和侧方探测;与第一毫米波雷达连接的雷达控制盒,用于接收第一毫米波雷达的探测信号,并根据探测信号判断汽车周边是否存在对象;及用于当判断汽车周边存在对象时,进一步确定与对象之间的相对位置关系,并根据得到的相对位置关系判断是否需要报警;与雷达控制盒连接的报警装置,用于根据雷达控制盒的判断结构进行相应的报警。其将毫米波雷达设置于后视镜中,便于对汽车后视镜后方的
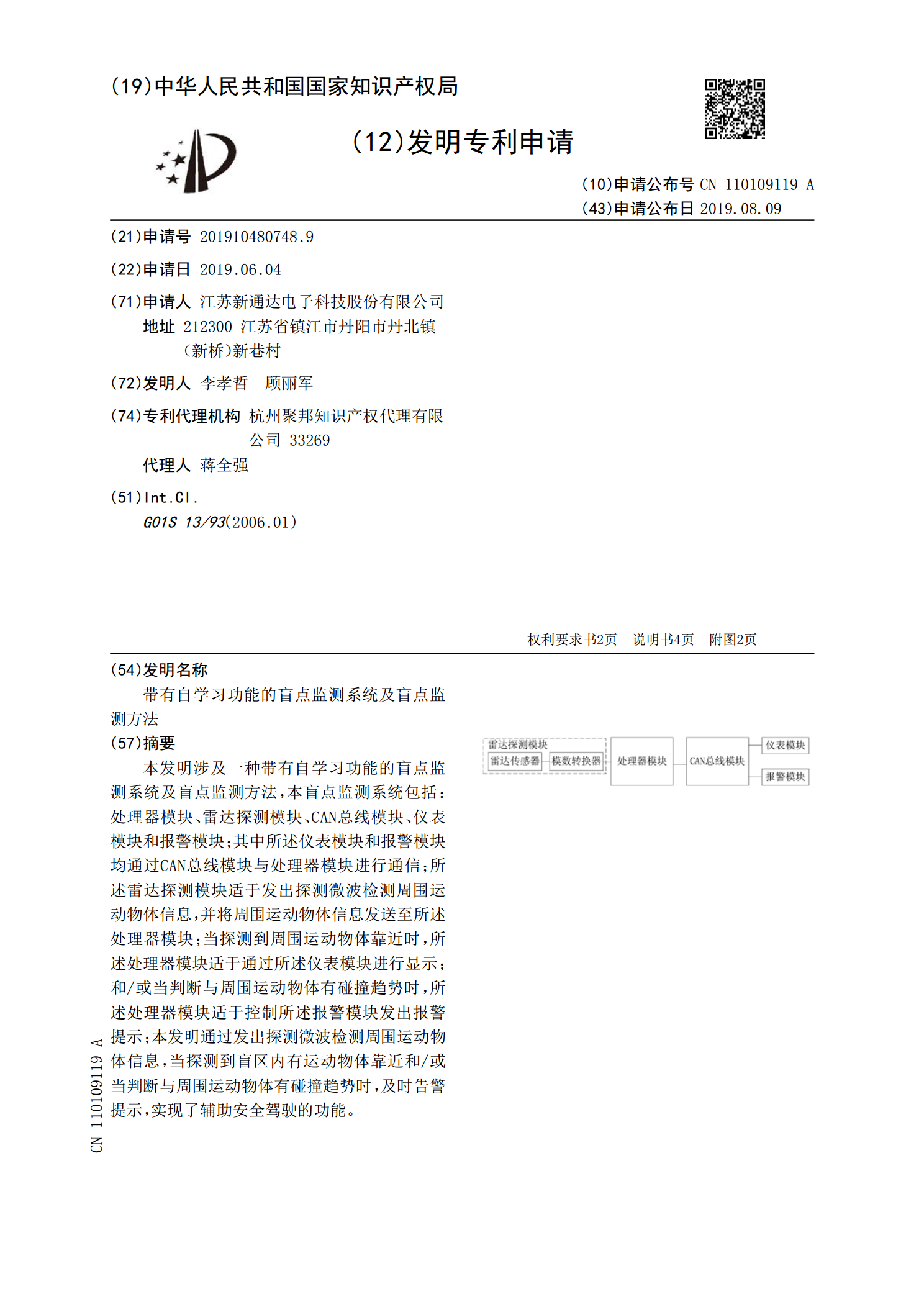
带有自学习功能的盲点监测系统及盲点监测方法.pdf
本发明涉及一种带有自学习功能的盲点监测系统及盲点监测方法,本盲点监测系统包括:处理器模块、雷达探测模块、CAN总线模块、仪表模块和报警模块;其中所述仪表模块和报警模块均通过CAN总线模块与处理器模块进行通信;所述雷达探测模块适于发出探测微波检测周围运动物体信息,并将周围运动物体信息发送至所述处理器模块;当探测到周围运动物体靠近时,所述处理器模块适于通过所述仪表模块进行显示;和/或当判断与周围运动物体有碰撞趋势时,所述处理器模块适于控制所述报警模块发出报警提示;本发明通过发出探测微波检测周围运动物体信息,当
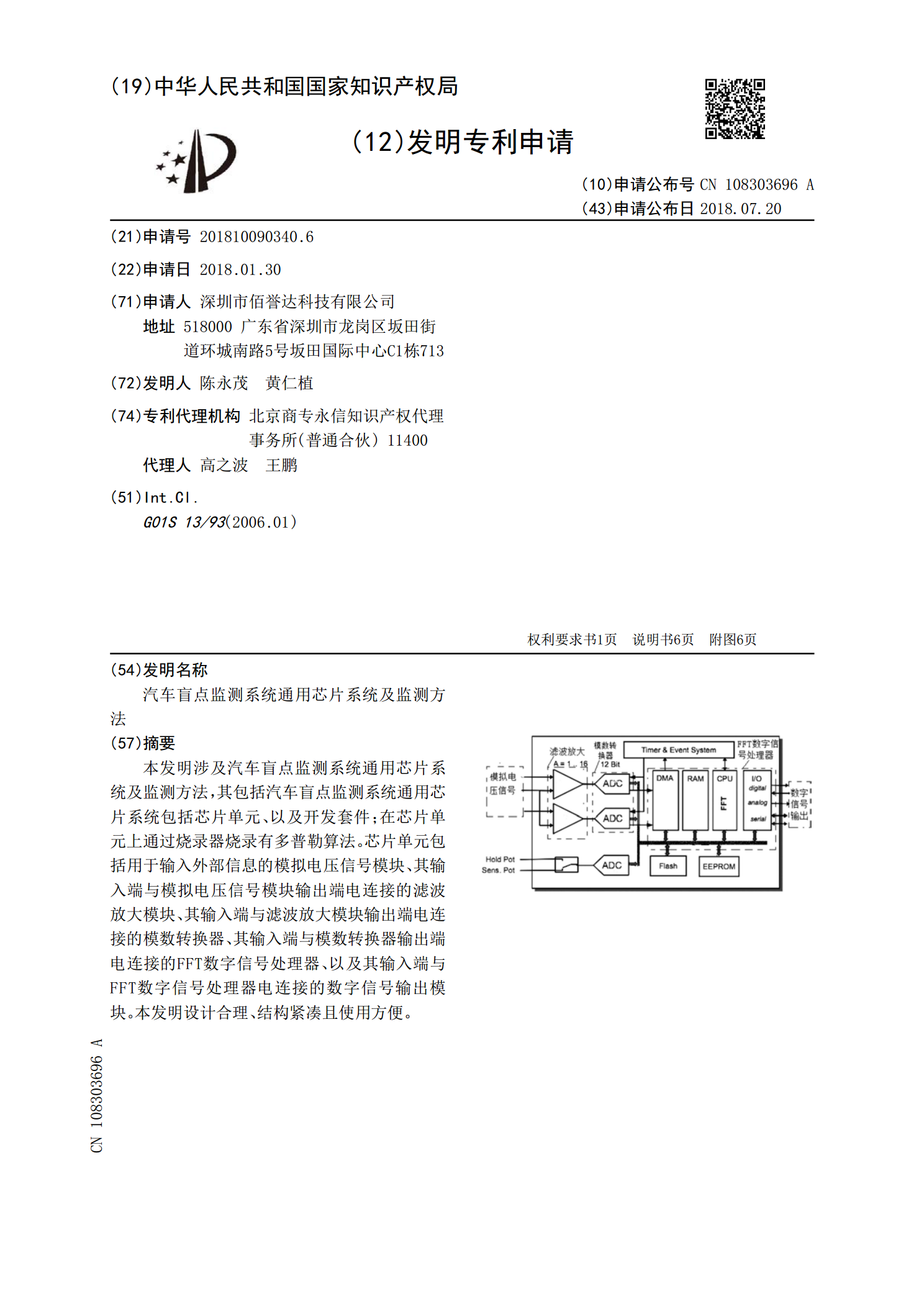
汽车盲点监测系统通用芯片系统及监测方法.pdf
本发明涉及汽车盲点监测系统通用芯片系统及监测方法,其包括汽车盲点监测系统通用芯片系统包括芯片单元、以及开发套件;在芯片单元上通过烧录器烧录有多普勒算法。芯片单元包括用于输入外部信息的模拟电压信号模块、其输入端与模拟电压信号模块输出端电连接的滤波放大模块、其输入端与滤波放大模块输出端电连接的模数转换器、其输入端与模数转换器输出端电连接的FFT数字信号处理器、以及其输入端与FFT数字信号处理器电连接的数字信号输出模块。本发明设计合理、结构紧凑且使用方便。
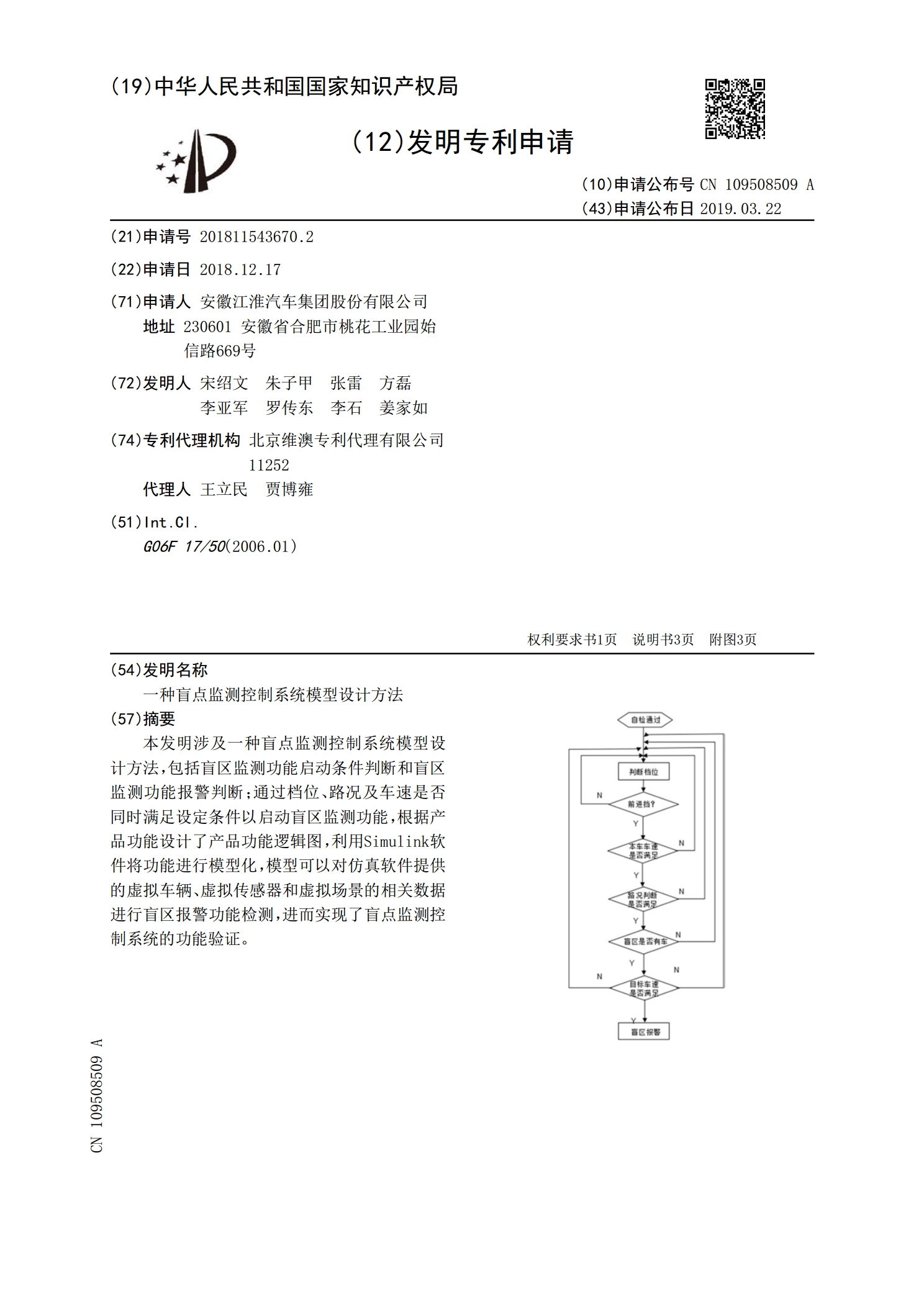
一种盲点监测控制系统模型设计方法.pdf
本发明涉及一种盲点监测控制系统模型设计方法,包括盲区监测功能启动条件判断和盲区监测功能报警判断;通过档位、路况及车速是否同时满足设定条件以启动盲区监测功能,根据产品功能设计了产品功能逻辑图,利用Simulink软件将功能进行模型化,模型可以对仿真软件提供的虚拟车辆、虚拟传感器和虚拟场景的相关数据进行盲区报警功能检测,进而实现了盲点监测控制系统的功能验证。