
汽车后视镜后方盲点监测系统及方法、雷达控制盒.pdf

一条****轩吗

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
汽车后视镜后方盲点监测系统及方法、雷达控制盒.pdf
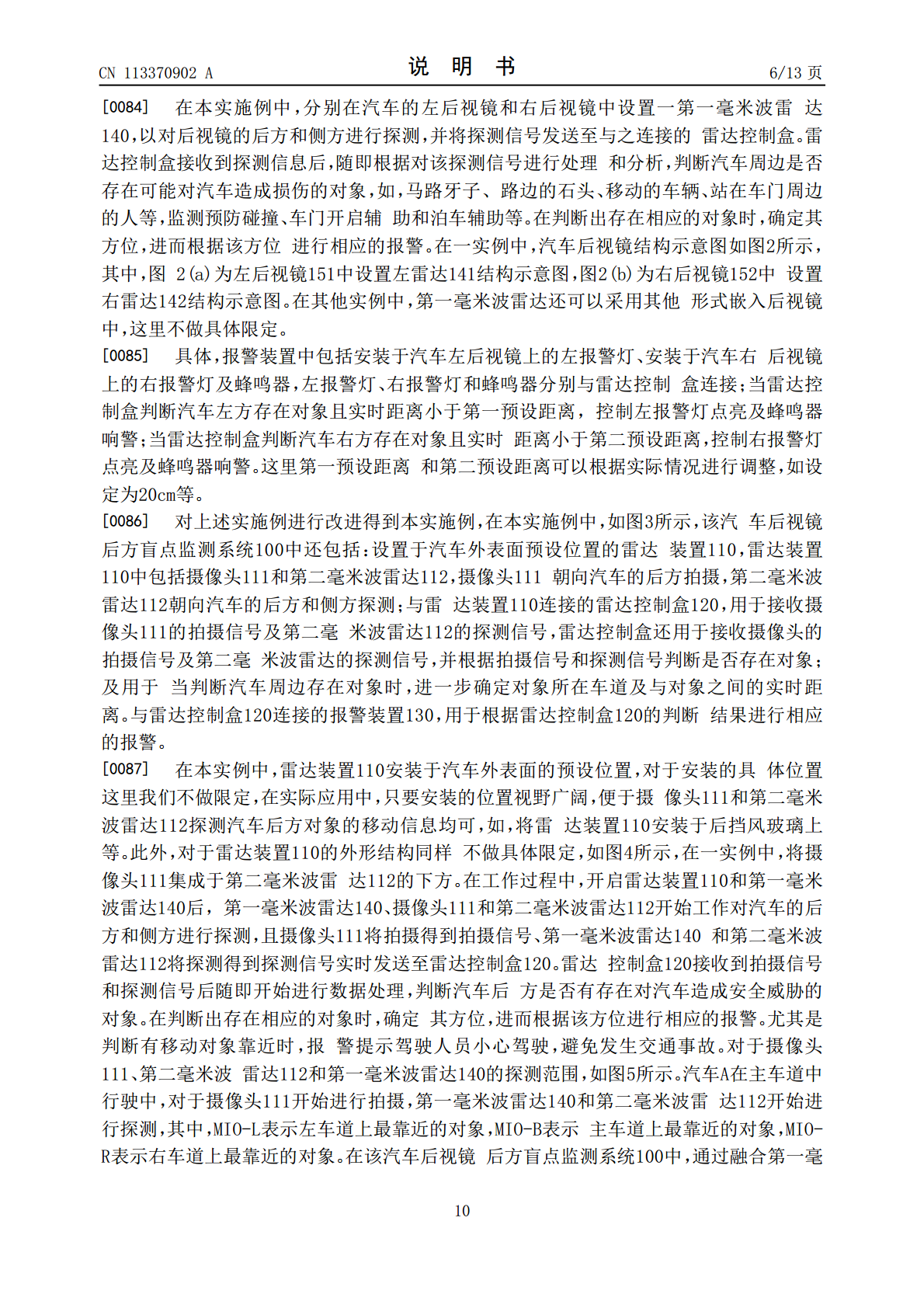
本发明提供了一种汽车后视镜后方盲点监测系统及方法、雷达控制盒,其中,汽车后视镜后方盲点监测系统中包括:设于汽车后视镜中的第一毫米波雷达,用于朝向后视镜的后方和侧方探测;与第一毫米波雷达连接的雷达控制盒,用于接收第一毫米波雷达的探测信号,并根据探测信号判断汽车周边是否存在对象;及用于当判断汽车周边存在对象时,进一步确定与对象之间的相对位置关系,并根据得到的相对位置关系判断是否需要报警;与雷达控制盒连接的报警装置,用于根据雷达控制盒的判断结构进行相应的报警。其将毫米波雷达设置于后视镜中,便于对汽车后视镜后方的
汽车微波雷达盲点监测系统的标定方法.pdf
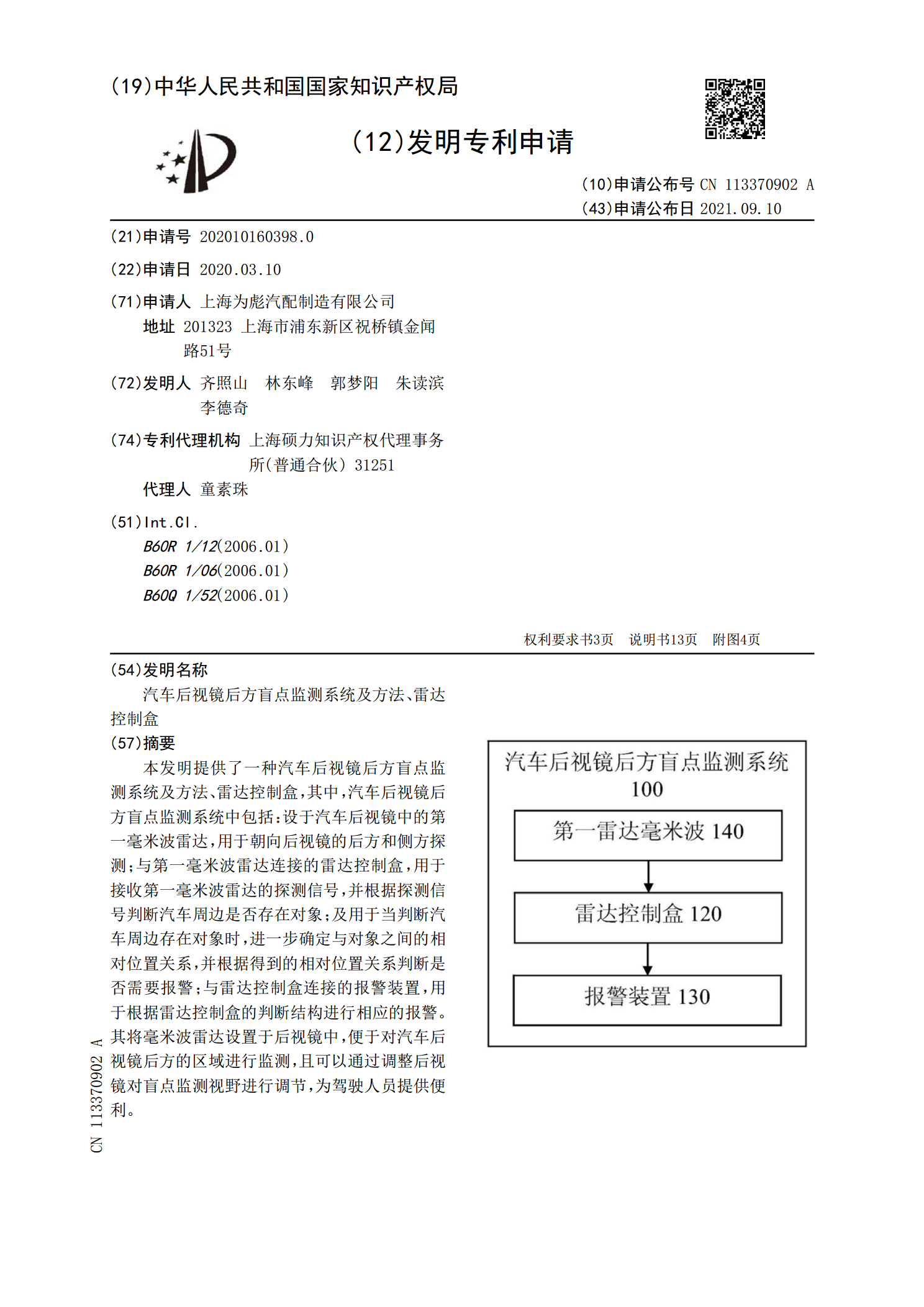
本发明公开一种汽车微波雷达盲点监测系统的标定方法,包括卷尺、角度布和直方尺,角度布上标有多个与角度布的一边成多个角度的多条画线,首先,摆正汽车的前轮与后轮,沿前轮与后轮的前后方向拉直卷尺,在汽车后保险杠的下方摆放角度布,使角度布的一边与卷尺平行;然后,让直方尺垂直角度布的平面而竖向放置,俯视直方尺,使直方尺一边平行或垂直于角度布上对应角度的画线,另一相邻边或对边中点与外圆弧形保险枉相切;最后,直方尺与保险杠相接触的位置便是所要定位角度的位置,画标记用以安装定位汽车微波雷达盲点监测系统。如此采用简单的工具,
盲点监测系统的控制方法.pdf
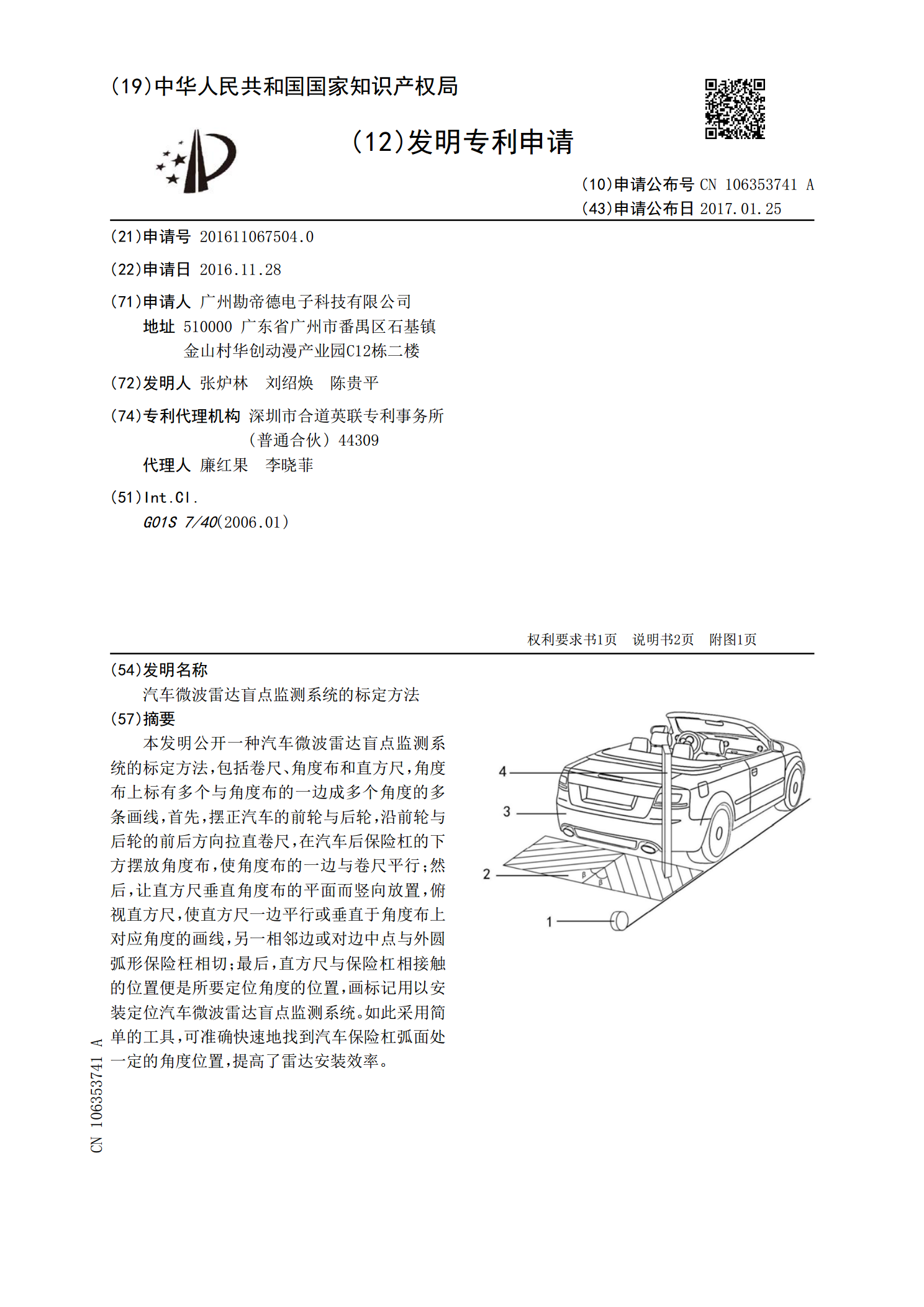
本发明公开了一种盲点监测系统的控制方法,包括:获取车轮转角和方向盘转角;根据所述车轮转角得到道路弯道半径;建立方向盘转角与道路弯道半径之间的函数关系;根据车辆运行时的实际弯道半径与所述函数关系,判断是否启动盲点监测系统。本发明提供的盲点监测系统的控制方法,利用车轮转角得到道路弯道半径,通过阿克曼几何模型建立前轮转角与弯道转弯半径关系,然后通过前轮转角模型与方向盘转角建立相应的动力学模型,最后通过整车试验校验动力学模型准确性。通过此方法无需通过摄像头识别车道线来识别转弯半径,即节约了研发成本,又避免因为光线
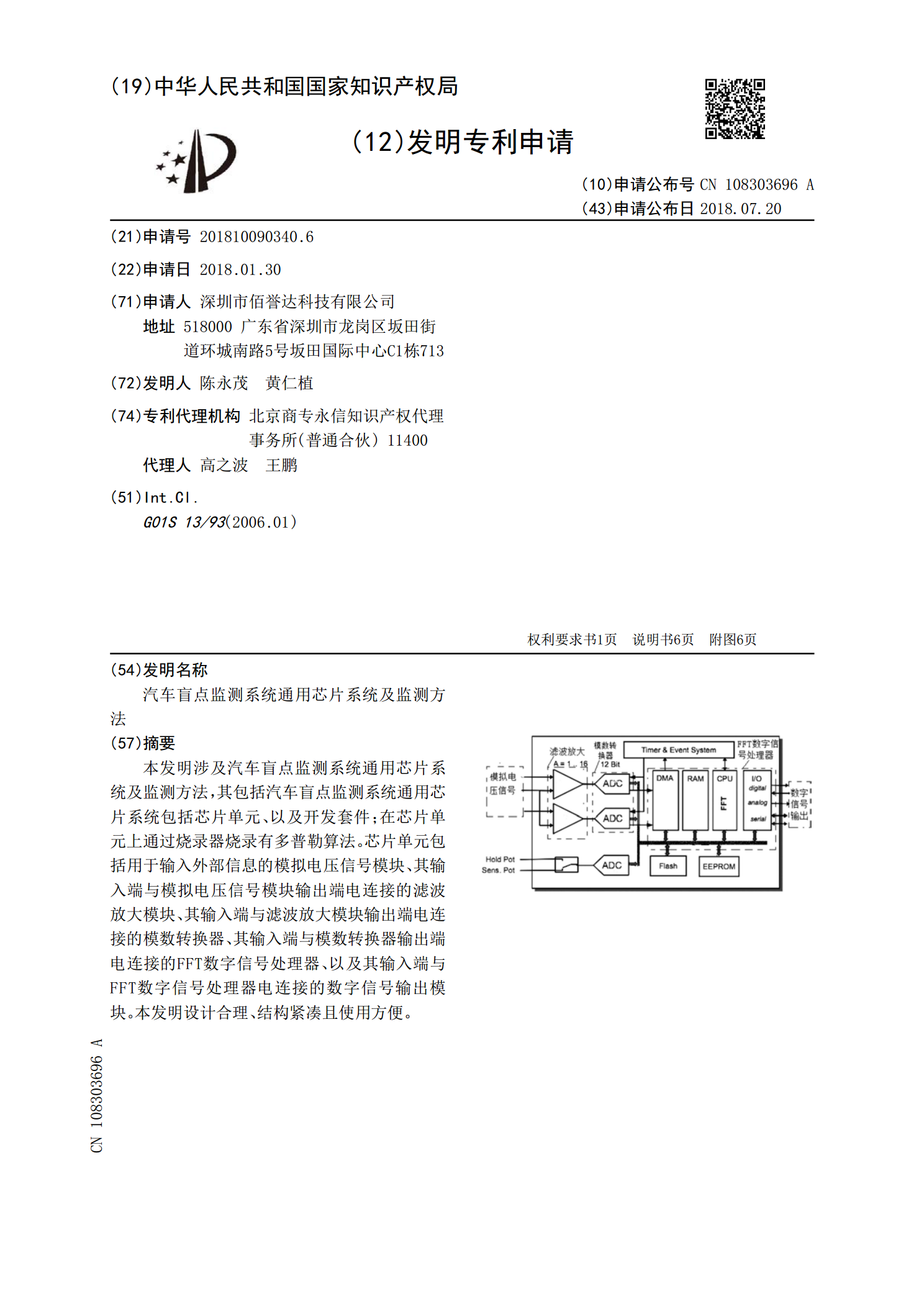
汽车盲点监测系统通用芯片系统及监测方法.pdf
本发明涉及汽车盲点监测系统通用芯片系统及监测方法,其包括汽车盲点监测系统通用芯片系统包括芯片单元、以及开发套件;在芯片单元上通过烧录器烧录有多普勒算法。芯片单元包括用于输入外部信息的模拟电压信号模块、其输入端与模拟电压信号模块输出端电连接的滤波放大模块、其输入端与滤波放大模块输出端电连接的模数转换器、其输入端与模数转换器输出端电连接的FFT数字信号处理器、以及其输入端与FFT数字信号处理器电连接的数字信号输出模块。本发明设计合理、结构紧凑且使用方便。
基于雷达传感的超车盲点监测系统.pdf
本发明公开了一种基于雷达传感的超车盲点监测系统,包含第一至第二雷达传感器、第一至第二超车指示灯、控制模块和转向灯传感器,控制模块分别和所述第一至第二雷达传感器、第一至第二超车指示灯、转向灯传感器相连;在转向灯打开时,获取转向灯打开方向雷达传感器获取的障碍物和汽车之间的距离,判断是否能够安全超车,并采用相应的超车指示灯来表示。本发明通过监视驾驶者难以看见的区域来缓解其大部分压力和避免危险情况的发生,使得驾驶者的注意力放在前方,极大的提高了行车安全系数。