
一种机载预警雷达多目标跟踪方法.pdf

秋花****姐姐


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种机载预警雷达多目标跟踪方法.pdf
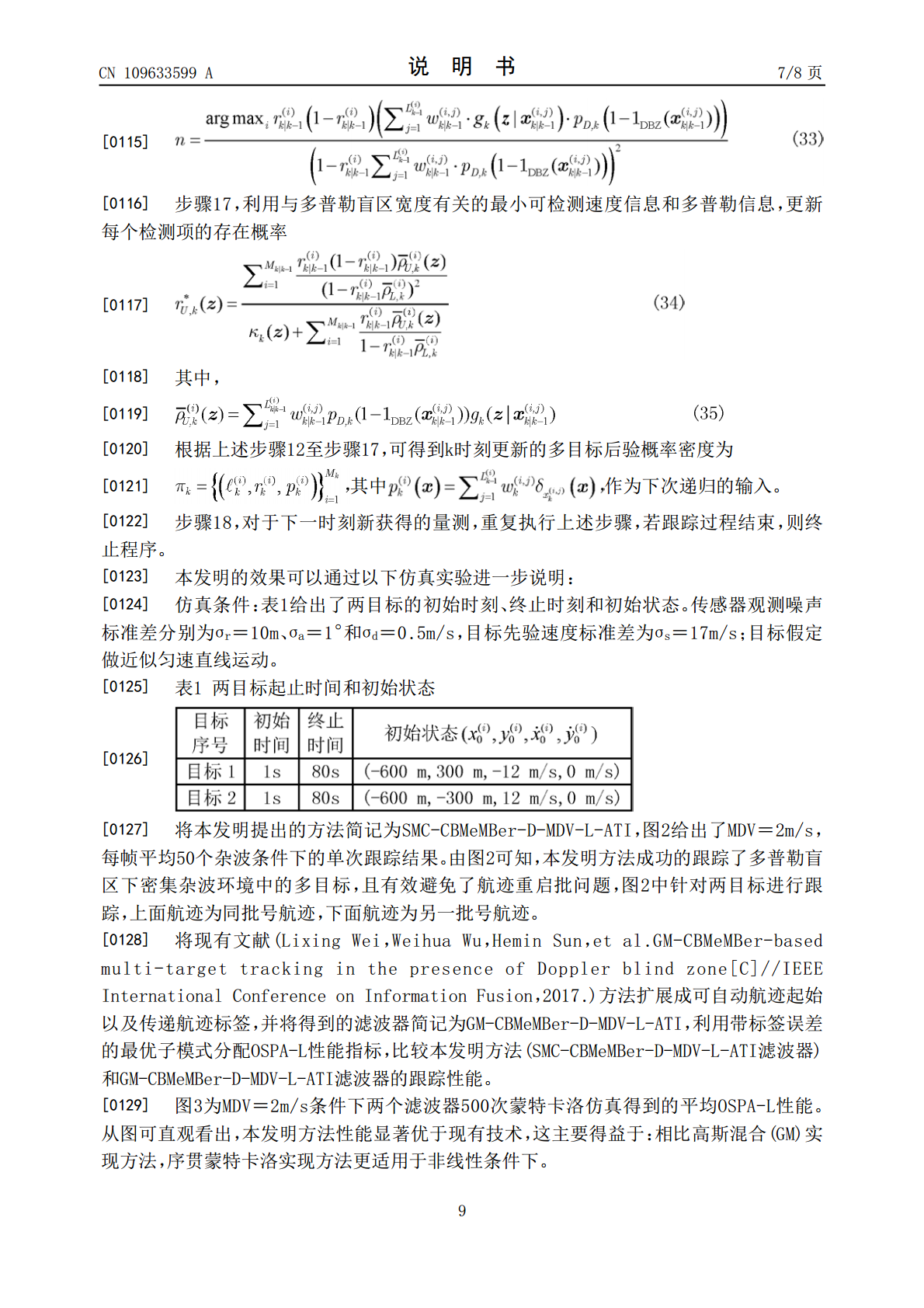
本发明涉及雷达信号处理领域,尤其涉及一种机载预警雷达多目标跟踪方法,其不同之处在于,其步骤包括:S1、机载雷达获取当前时刻的位置量测;S2、筛选出可能对应新生目标的剩余量测;S3、计算新生目标以粒子形式表示的概率密度;S4、预测存活目标下一时刻以粒子形式表示的概率密度;S5、更新每个预测目标漏检时以粒子形式表示的概率密度;S6、根据当前时刻检测到的每个量测,更新每个检测项对应的概率密度;S7、对于下一时刻新获得的量测,重复执行上述步骤。本发明有效处理机载预警雷达多普勒盲区存在下密集杂波多目标跟踪的问题。

机载雷达多目标跟踪技术研究.docx
机载雷达多目标跟踪技术研究Title:ResearchonMulti-targetTrackingTechniquesforOn-boardRadarAbstract:Withtheadvancementofradartechnology,on-boardradarshavebecomeanessentialpartofvariousapplications,includingaircraft,satellites,andautonomousvehicles.Multi-targettrackingisa

基于最小覆盖空域的机载预警雷达的多帧检测前跟踪方法.pdf
本发明公开一种基于最小覆盖空域的机载预警雷达的多帧检测前跟踪方法,为了解决因雷达平台移动引起的量测空域网格不对齐,给基于动态规划的检测前跟踪算法带来的实施困难;本发明首先采用一种量测网格对齐式离散化方法离散化整个状态空间,接着利用坐标系变化的方法确定出量测和状态的映射关系,然后遍历各维度的最大映射结果以压缩覆盖空域的大小,再根据映射关系完成对应最小覆盖空域维度的积累数据准备,最后用检测前跟踪算法完成对目标的检测跟踪;本发明的方法尽可能的保留了量测点迹的原始位置,在保留绝大部分量测点迹的情况下,压缩搜索空域

一种基于MATLAB的机载预警雷达探测能力仿真方法.pdf
本发明提供一种基于MATLAB的机载预警雷达探测能力仿真方法,该方法根据机载预警雷达、保护区域与敌方目标的相对位置,建立机载预警雷达的探测模型;然后,根据雷达和目标的运动参数和雷达系统参数,计算机载预警雷达的探测性能;最后,利用MATLAB软件对机载预警雷达的探测性能进行仿真和动态显示。本发明方案适用于机载预警雷达的探测能力仿真,能够有效仿真机载预警雷达的探测性能,同时对多普勒速度盲区和近场盲区进行有效预测,而且具有良好的人机交互功能,能够实现了动态可视化。

基于辅助通道的机载预警雷达杂波抑制方法.pdf
本发明公开了一种基于辅助通道的机载预警雷达杂波抑制方法,其思路为:获取机载预警雷达接收到的三维回波数据,并据此得到所述三维回波数据的杂波脊,进而得到二维回波数据;再根据三维回波数据的杂波脊,分别获取num个辅助通道和num个搜索通道,得到num个辅助通道对应的空域频率向量和num个辅助通道对应的时域频率向量,进而依次得到num个辅助通道对应的降维矩阵和num个搜索通道对应的矩阵,并据此得到优化辅助通道的降维矩阵和基于辅助通道的变换矩阵;对所述二维回波数据和num个搜索通道对应的矩阵分别进行降维处理,得到降