
一种基于MATLAB的机载预警雷达探测能力仿真方法.pdf

一条****杉淑

1/10
2/10
3/10
4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于MATLAB的机载预警雷达探测能力仿真方法.pdf
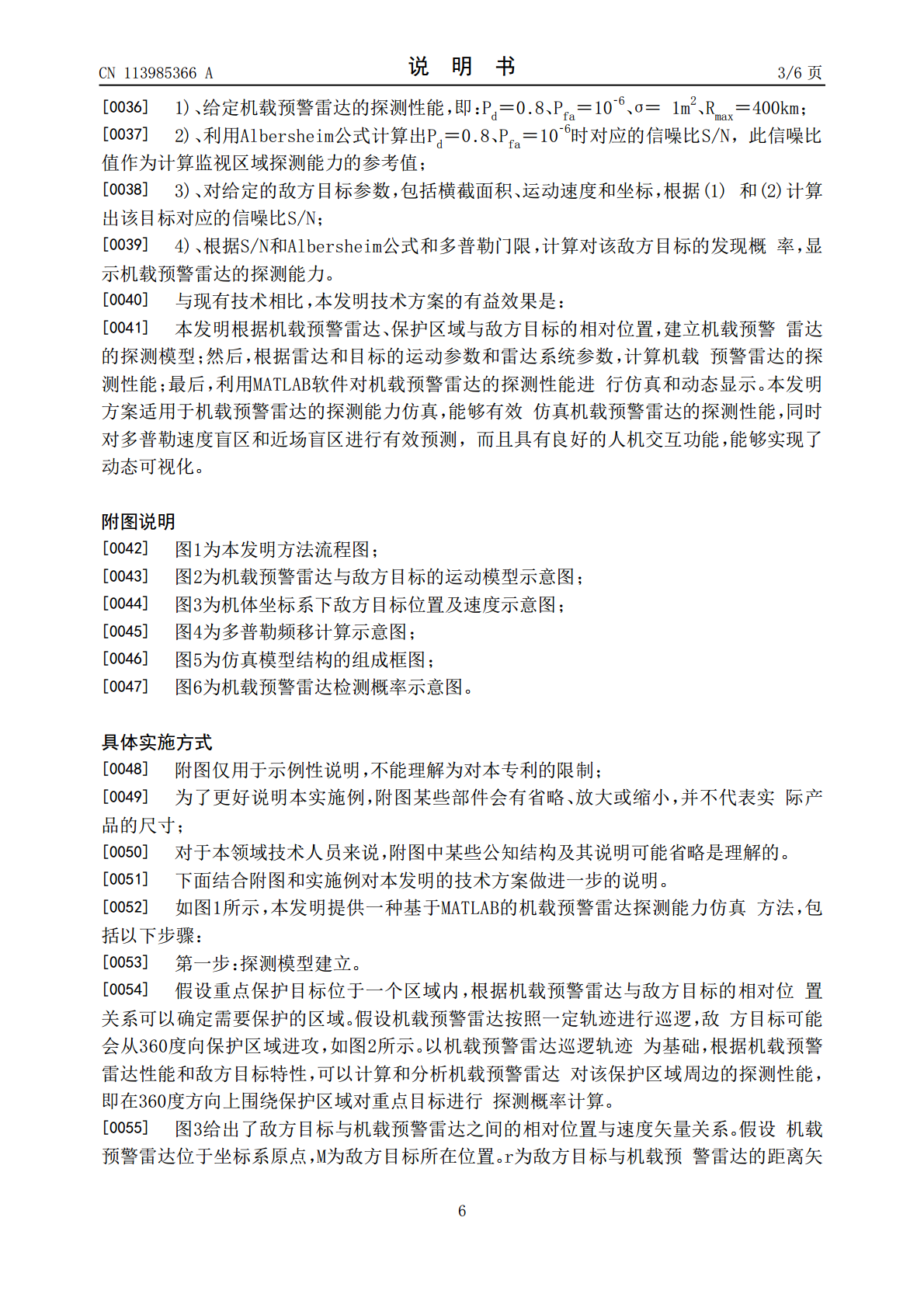
本发明提供一种基于MATLAB的机载预警雷达探测能力仿真方法,该方法根据机载预警雷达、保护区域与敌方目标的相对位置,建立机载预警雷达的探测模型;然后,根据雷达和目标的运动参数和雷达系统参数,计算机载预警雷达的探测性能;最后,利用MATLAB软件对机载预警雷达的探测性能进行仿真和动态显示。本发明方案适用于机载预警雷达的探测能力仿真,能够有效仿真机载预警雷达的探测性能,同时对多普勒速度盲区和近场盲区进行有效预测,而且具有良好的人机交互功能,能够实现了动态可视化。

基于AHP和ADC的机载预警雷达对海探测效能评估.docx
基于AHP和ADC的机载预警雷达对海探测效能评估随着海洋经济的快速发展和国家战略需求的不断提升,海洋领域的探测技术得到了广泛的关注和应用。机载预警雷达作为一种重要的海洋探测技术,具有发现目标准确、非接触式探测、远距离探测等优越性能,越来越得到了广泛应用。针对机载预警雷达对海探测效能的评估问题,本文采用了AHP和ADC的方法来进行评估研究。一、AHP方法概述AHP(AnalyticHierarchyProcess)是一种多因素决策的层次分析方法。该方法旨在通过对决策问题的分层、层次化和加权判断,最终得出最合

基于辅助通道的机载预警雷达杂波抑制方法.pdf
本发明公开了一种基于辅助通道的机载预警雷达杂波抑制方法,其思路为:获取机载预警雷达接收到的三维回波数据,并据此得到所述三维回波数据的杂波脊,进而得到二维回波数据;再根据三维回波数据的杂波脊,分别获取num个辅助通道和num个搜索通道,得到num个辅助通道对应的空域频率向量和num个辅助通道对应的时域频率向量,进而依次得到num个辅助通道对应的降维矩阵和num个搜索通道对应的矩阵,并据此得到优化辅助通道的降维矩阵和基于辅助通道的变换矩阵;对所述二维回波数据和num个搜索通道对应的矩阵分别进行降维处理,得到降

基于分形方法的机载雷达云仿真.docx
基于分形方法的机载雷达云仿真基于分形方法的机载雷达云仿真摘要:机载雷达云仿真是一种重要的气象学研究工具,它能够模拟出各类云的形状和分布情况,为气象学研究提供了有效的数据支持。本文基于分形方法,进行了机载雷达云仿真的研究。通过分析云的分形特性,构建出了合理的分形模型,并利用计算机程序进行仿真。仿真结果表明,基于分形方法的机载雷达云仿真能够准确地模拟出云的形状和分布情况,为气象学研究提供了重要的参考依据。关键词:机载雷达;云仿真;分形方法;气象学研究一、引言机载雷达云仿真是一种重要的气象学研究工具,它通过模拟
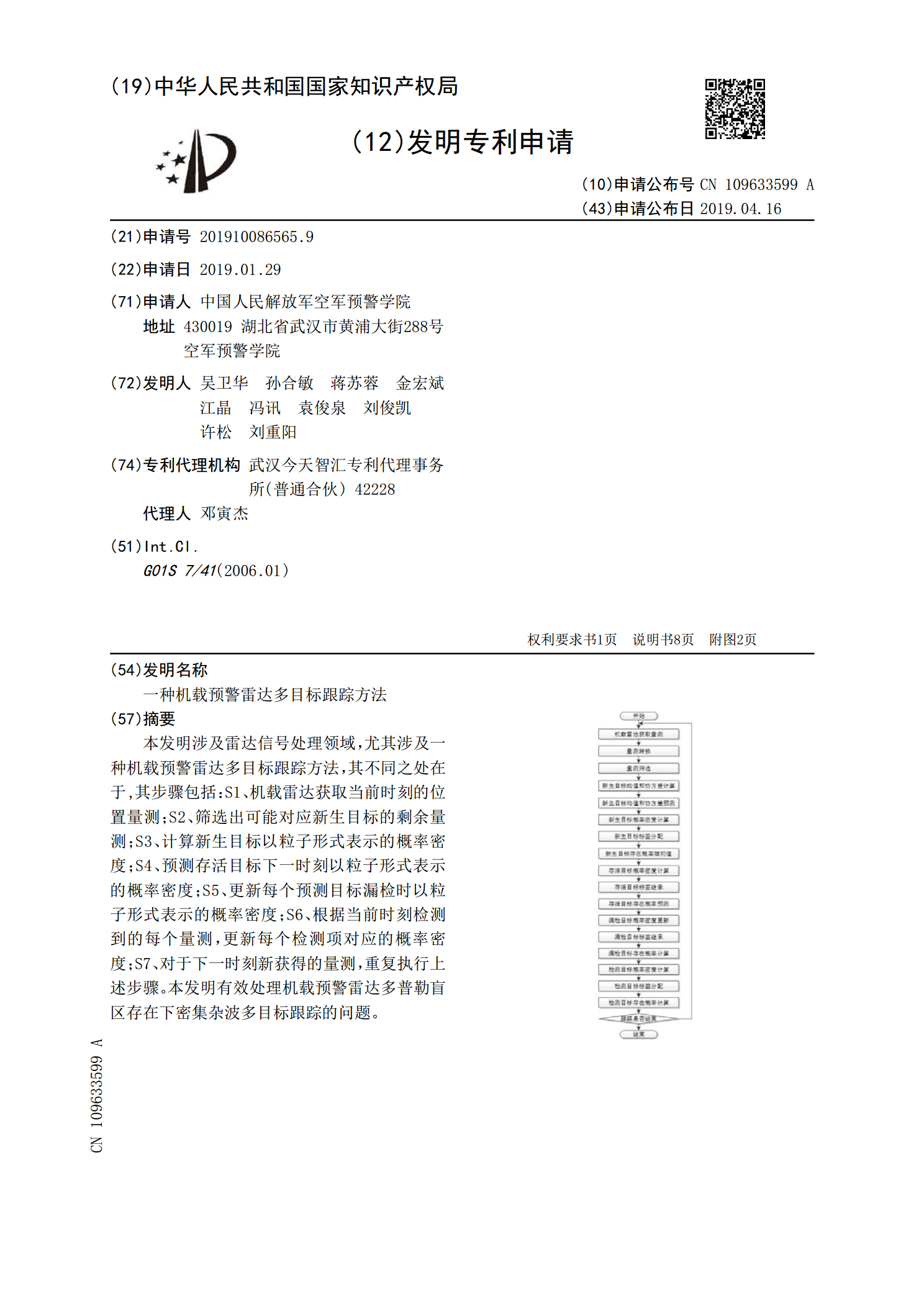
一种机载预警雷达多目标跟踪方法.pdf
本发明涉及雷达信号处理领域,尤其涉及一种机载预警雷达多目标跟踪方法,其不同之处在于,其步骤包括:S1、机载雷达获取当前时刻的位置量测;S2、筛选出可能对应新生目标的剩余量测;S3、计算新生目标以粒子形式表示的概率密度;S4、预测存活目标下一时刻以粒子形式表示的概率密度;S5、更新每个预测目标漏检时以粒子形式表示的概率密度;S6、根据当前时刻检测到的每个量测,更新每个检测项对应的概率密度;S7、对于下一时刻新获得的量测,重复执行上述步骤。本发明有效处理机载预警雷达多普勒盲区存在下密集杂波多目标跟踪的问题。