
一种汽车导航HUD抬头显示系统.pdf

一吃****永贺

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种汽车导航HUD抬头显示系统.pdf
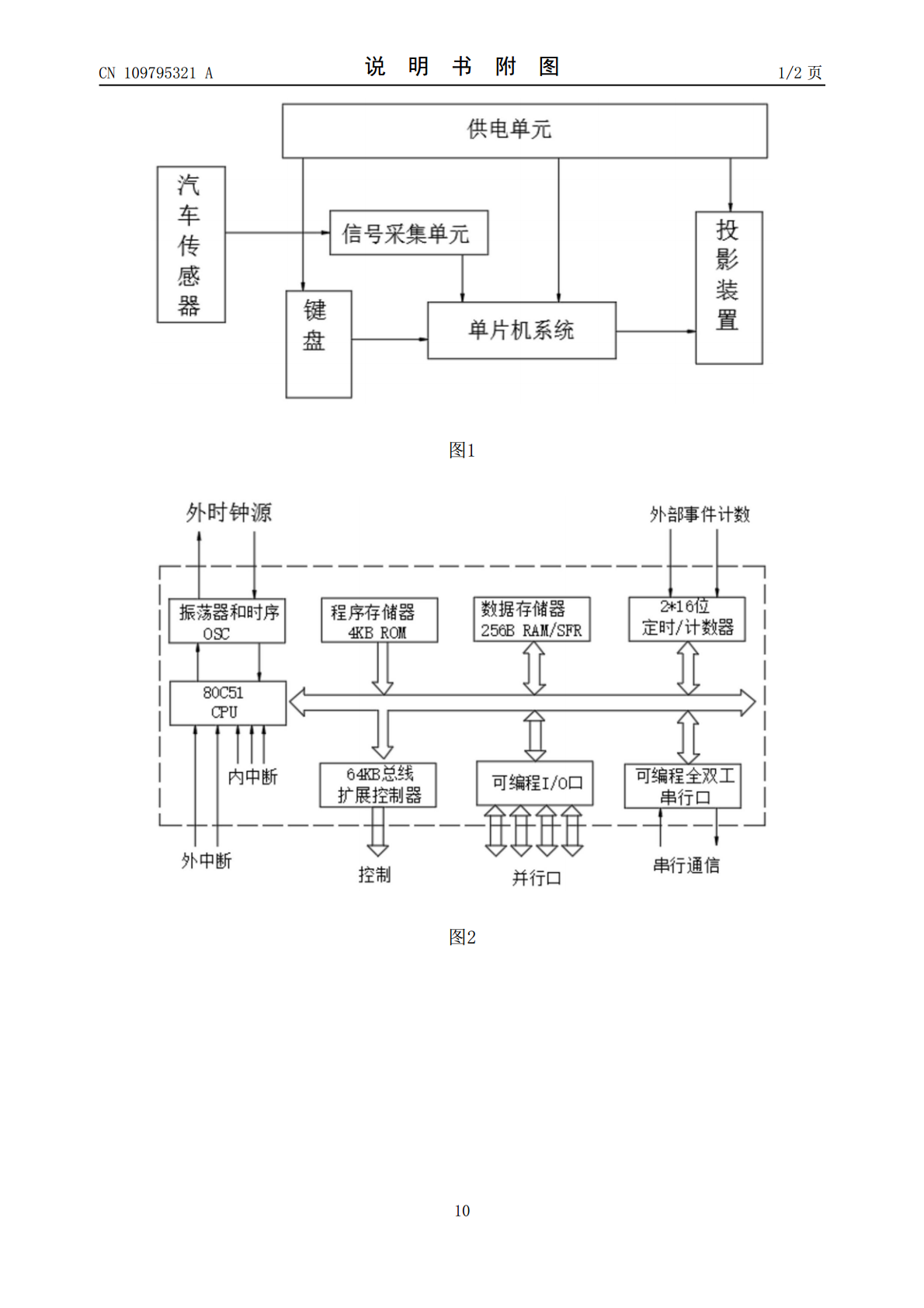
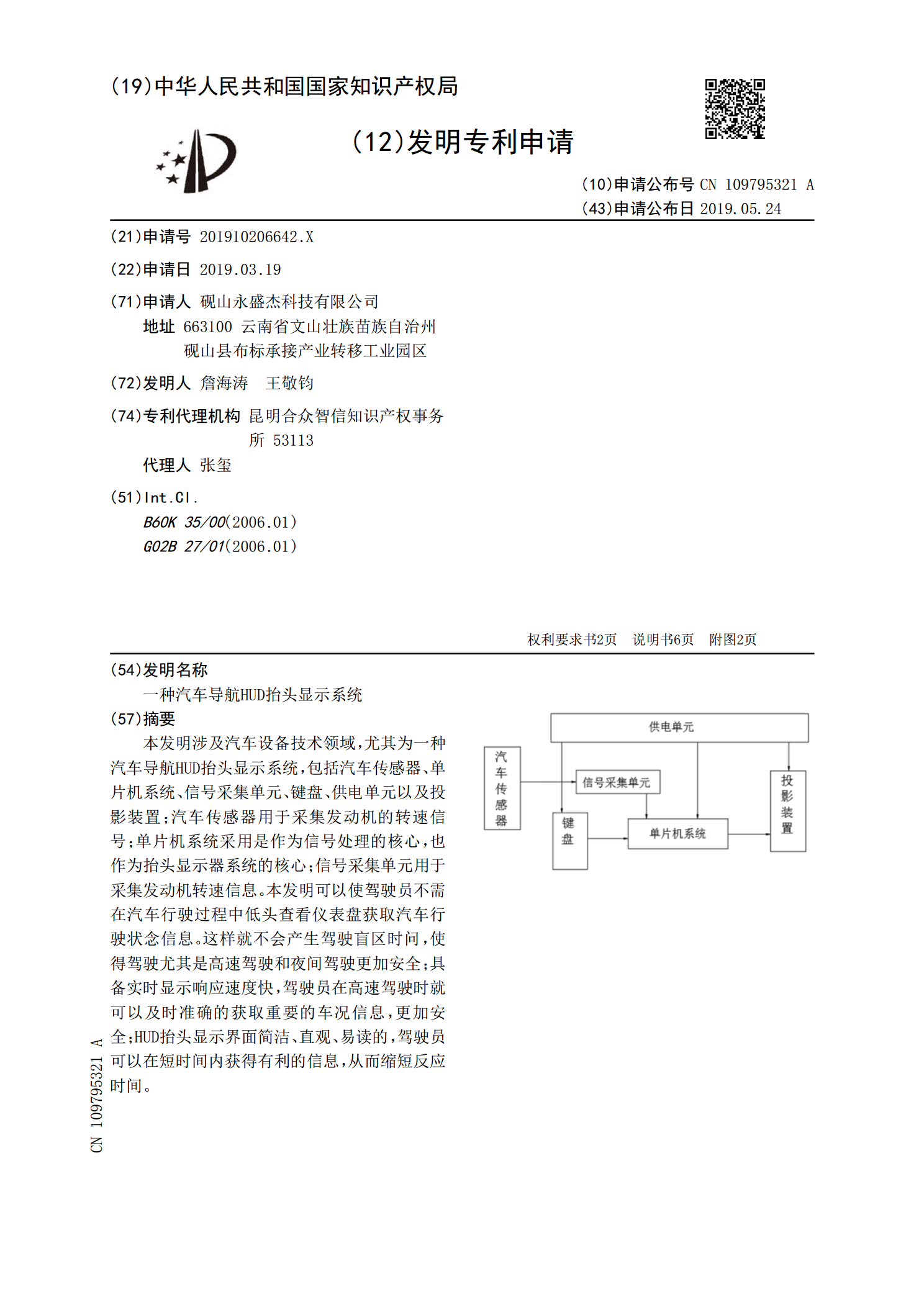
本发明涉及汽车设备技术领域,尤其为一种汽车导航HUD抬头显示系统,包括汽车传感器、单片机系统、信号采集单元、键盘、供电单元以及投影装置;汽车传感器用于采集发动机的转速信号;单片机系统采用是作为信号处理的核心,也作为抬头显示器系统的核心;信号采集单元用于采集发动机转速信息。本发明可以使驾驶员不需在汽车行驶过程中低头查看仪表盘获取汽车行驶状念信息。这样就不会产生驾驶盲区时问,使得驾驶尤其是高速驾驶和夜间驾驶更加安全;具备实时显示响应速度快,驾驶员在高速驾驶时就可以及时准确的获取重要的车况信息,更加安全;HUD
一种汽车HUD抬头显示器.pdf
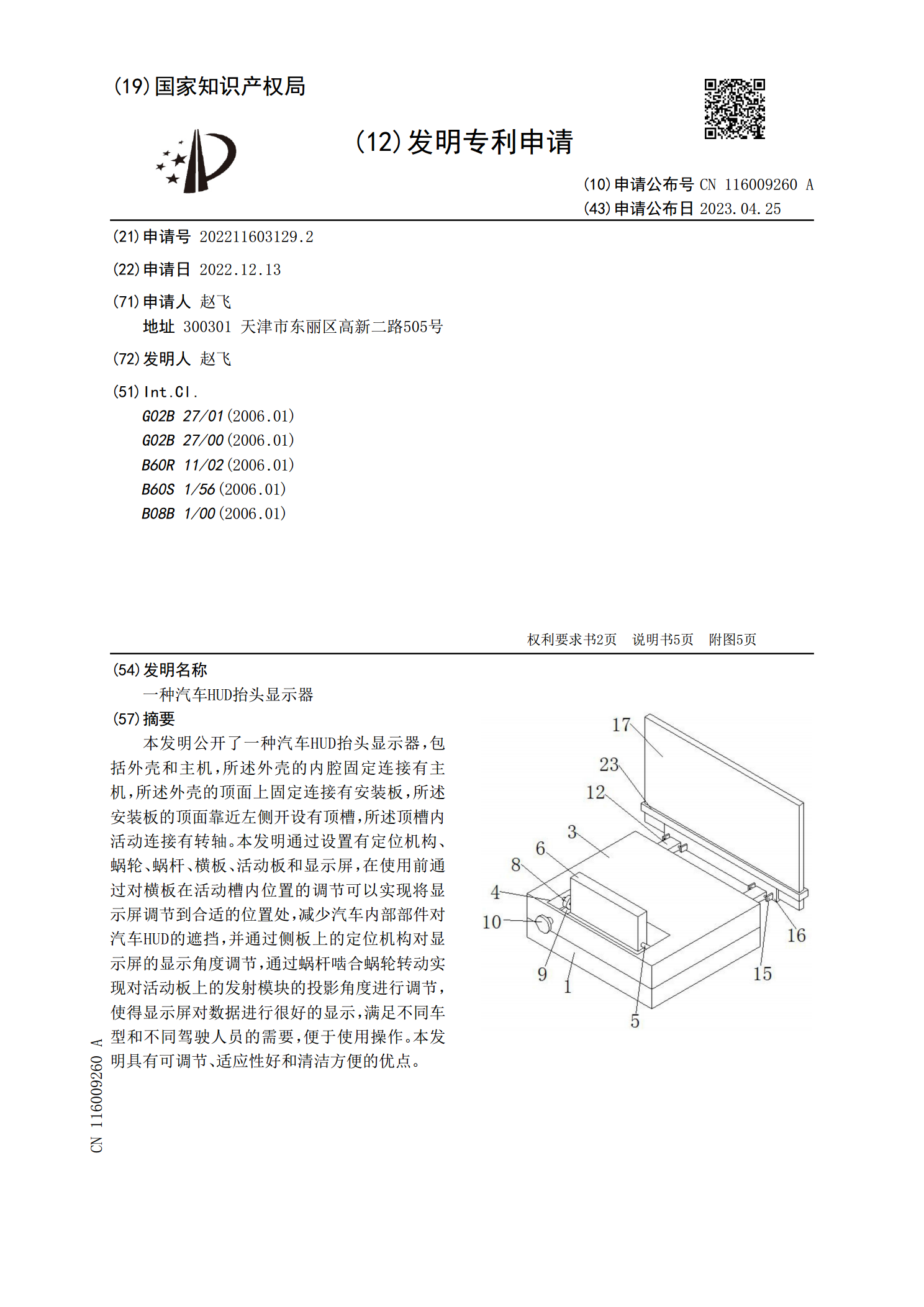
本发明公开了一种汽车HUD抬头显示器,包括外壳和主机,所述外壳的内腔固定连接有主机,所述外壳的顶面上固定连接有安装板,所述安装板的顶面靠近左侧开设有顶槽,所述顶槽内活动连接有转轴。本发明通过设置有定位机构、蜗轮、蜗杆、横板、活动板和显示屏,在使用前通过对横板在活动槽内位置的调节可以实现将显示屏调节到合适的位置处,减少汽车内部部件对汽车HUD的遮挡,并通过侧板上的定位机构对显示屏的显示角度调节,通过蜗杆啮合蜗轮转动实现对活动板上的发射模块的投影角度进行调节,使得显示屏对数据进行很好的显示,满足不同车型和不同

一种基于DLP技术的HUD抬头显示系统.pdf
本发明公开了一种基于DLP技术的HUD抬头显示系统,具有抬头显示器,所述抬头显示器上设置有HUD透镜,所述抬头显示器通过所述HUD透镜将图像信息显示在HUD虚拟投影界面上;所述抬头显示器上还设置有能够将手机信息显示在虚拟投影界面上的手机通讯接口;所述抬头显示器上设置有能够识别使用者手势的手势识别传感器;所述抬头显示器上设置有能够读取车辆CAN上信息的OBD通讯接口。这种基于DLP技术的HUD抬头显示系统将现有的DLP技术引用到HUD技术领域,从而使抬头显示器具有显示色彩丰富、显示内容丰富且能够适应多种光线
一种便于调节的汽车HUD抬头显示器.pdf
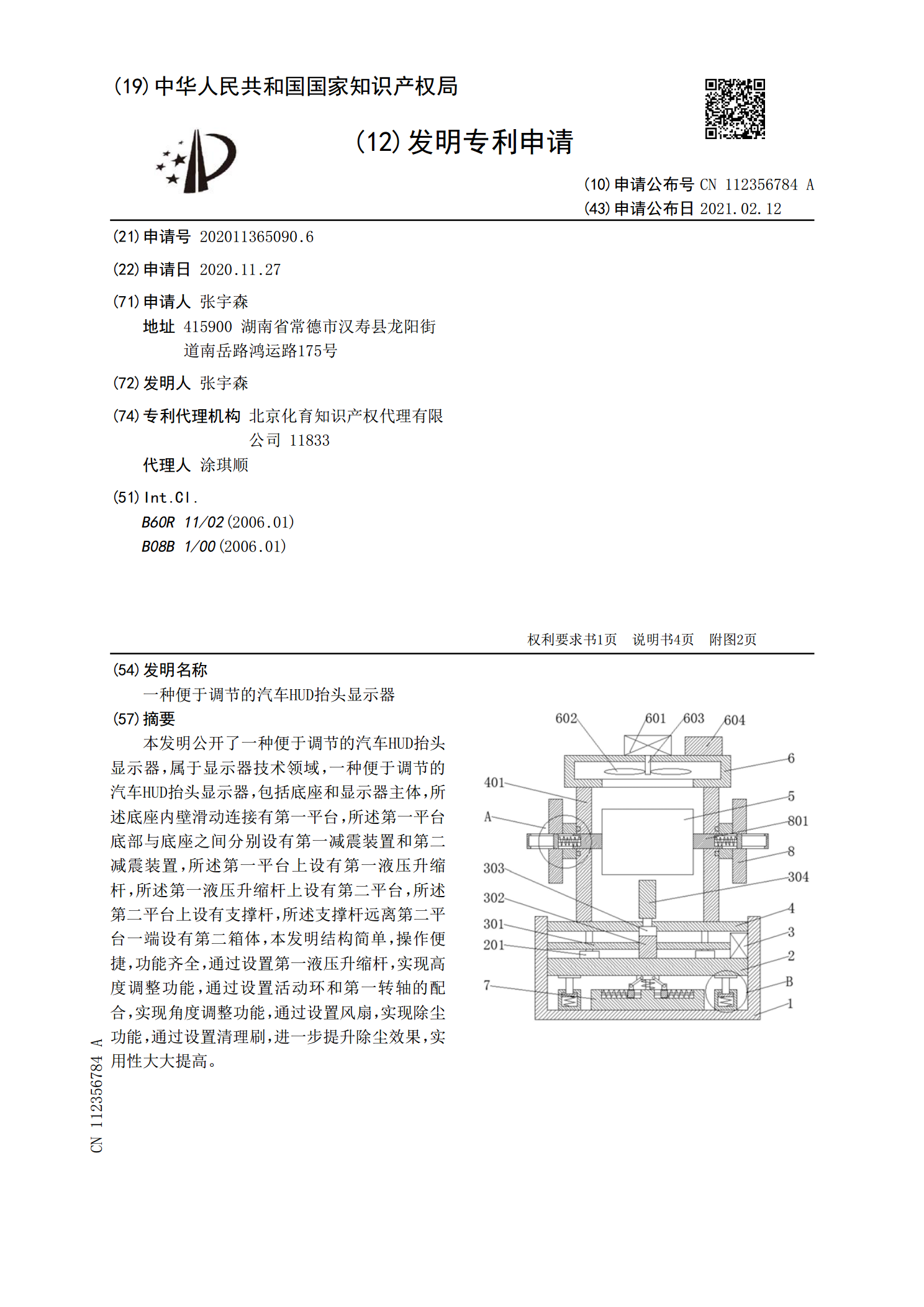
本发明公开了一种便于调节的汽车HUD抬头显示器,属于显示器技术领域,一种便于调节的汽车HUD抬头显示器,包括底座和显示器主体,所述底座内壁滑动连接有第一平台,所述第一平台底部与底座之间分别设有第一减震装置和第二减震装置,所述第一平台上设有第一液压升缩杆,所述第一液压升缩杆上设有第二平台,所述第二平台上设有支撑杆,所述支撑杆远离第二平台一端设有第二箱体,本发明结构简单,操作便捷,功能齐全,通过设置第一液压升缩杆,实现高度调整功能,通过设置活动环和第一转轴的配合,实现角度调整功能,通过设置风扇,实现除尘功能,
一种基于HUD抬头显示技术的汽车换道辅助驾驶系统及方法.pdf
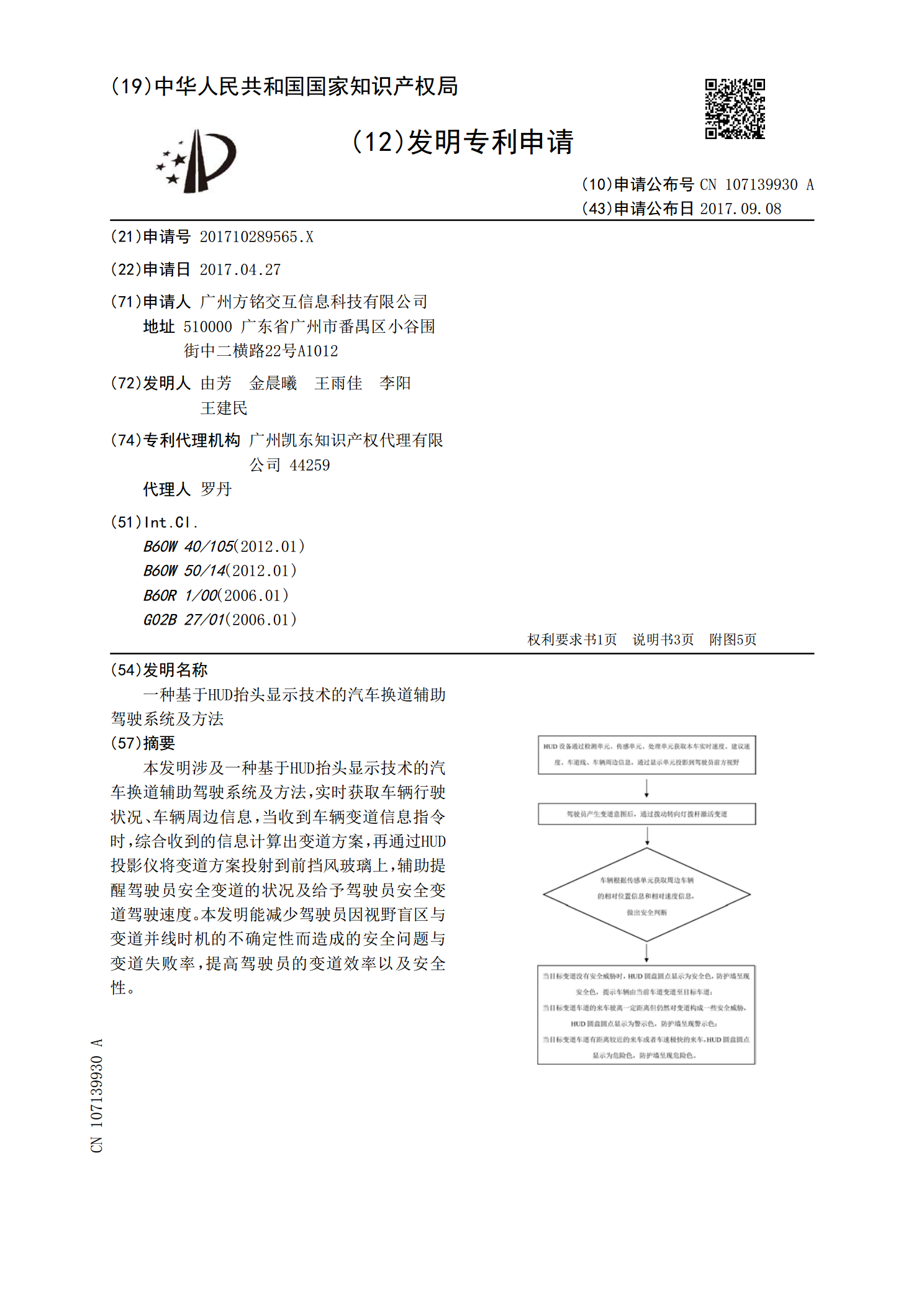
本发明涉及一种基于HUD抬头显示技术的汽车换道辅助驾驶系统及方法,实时获取车辆行驶状况、车辆周边信息,当收到车辆变道信息指令时,综合收到的信息计算出变道方案,再通过HUD投影仪将变道方案投射到前挡风玻璃上,辅助提醒驾驶员安全变道的状况及给予驾驶员安全变道驾驶速度。本发明能减少驾驶员因视野盲区与变道并线时机的不确定性而造成的安全问题与变道失败率,提高驾驶员的变道效率以及安全性。