
GNSS盲区智能车辅助定位系统累积误差的协同校正系统及方法.pdf

鸿朗****ka


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
GNSS盲区智能车辅助定位系统累积误差的协同校正系统及方法.pdf
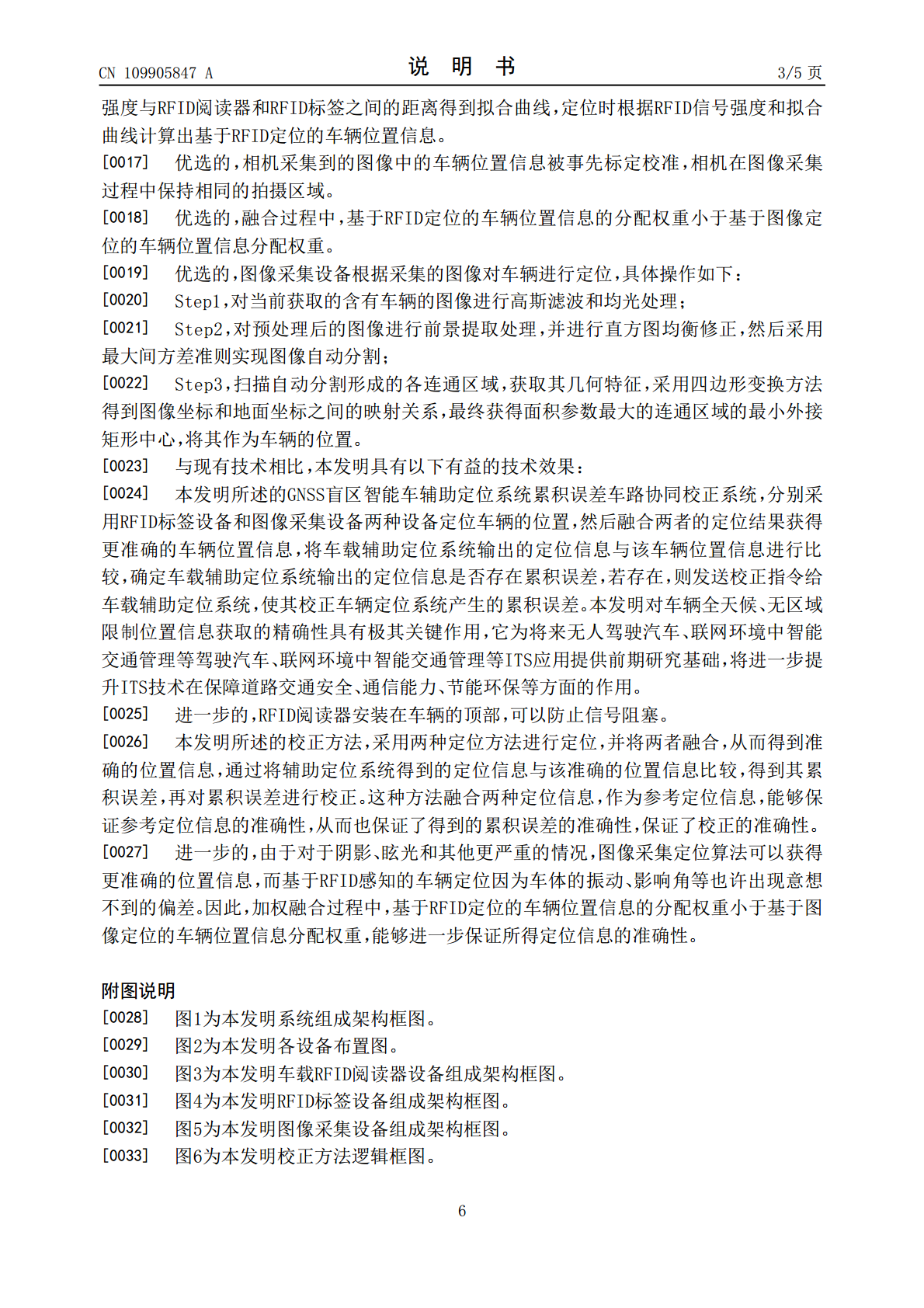
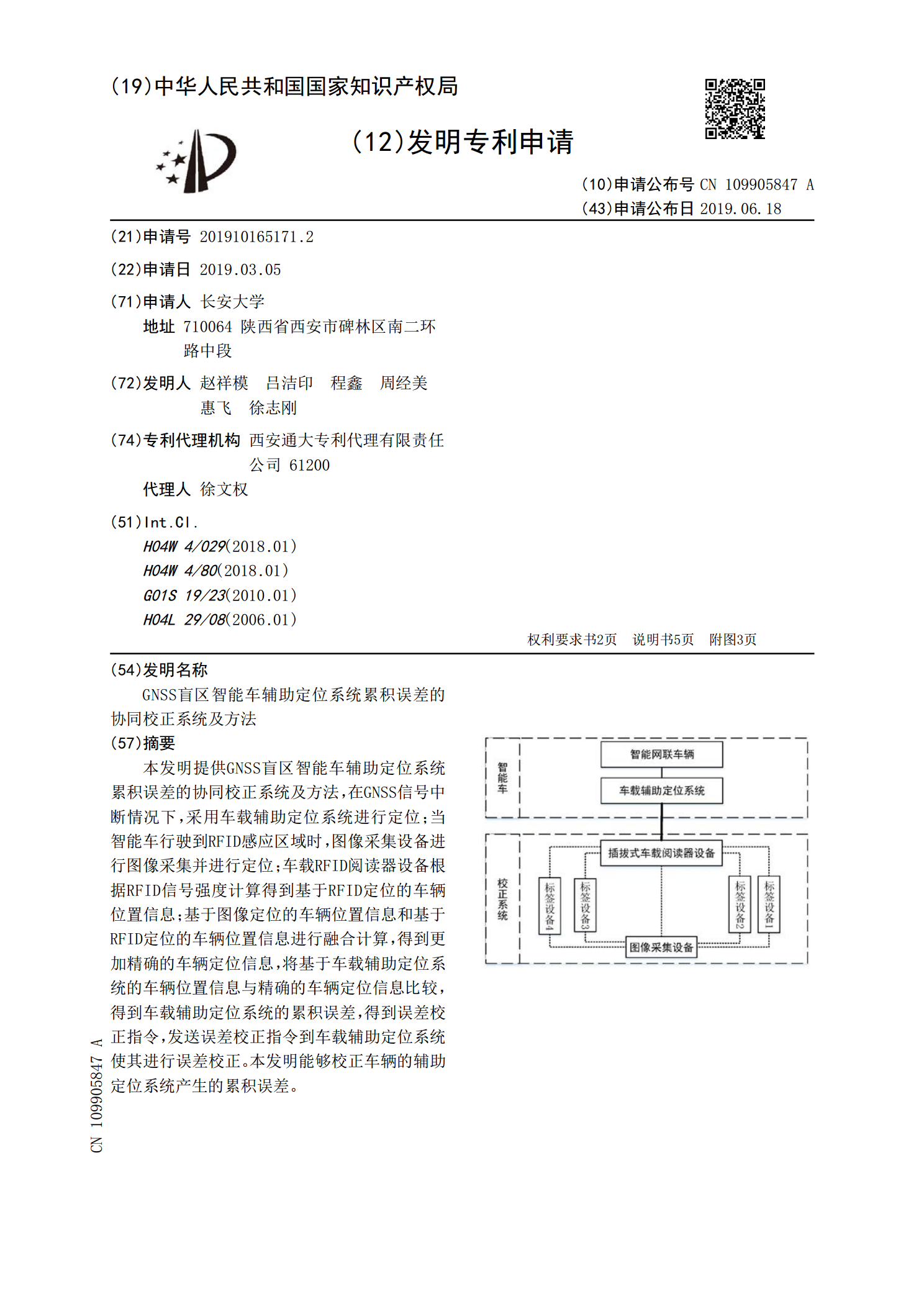
本发明提供GNSS盲区智能车辅助定位系统累积误差的协同校正系统及方法,在GNSS信号中断情况下,采用车载辅助定位系统进行定位;当智能车行驶到RFID感应区域时,图像采集设备进行图像采集并进行定位;车载RFID阅读器设备根据RFID信号强度计算得到基于RFID定位的车辆位置信息;基于图像定位的车辆位置信息和基于RFID定位的车辆位置信息进行融合计算,得到更加精确的车辆定位信息,将基于车载辅助定位系统的车辆位置信息与精确的车辆定位信息比较,得到车载辅助定位系统的累积误差,得到误差校正指令,发送误差校正指令到车

基于智能车路协同系统的差分定位方法及智能车路协同系统.pdf
本发明提供一种基于智能车路协同系统的差分定位方法及智能车路协同系统,其中,所述系统包括:路侧单元,用于获取差分定位修正参数,并将所述差分定位修正参数广播至预设范围内的车载单元;车载单元,用于获取所述车载单元的原始定位数据,并基于所述差分定位修正参数,对所述原始定位数据进行修正,得到所述车载单元的最终定位数据。本发明可以在车路协同系统中实现差分定位的功能,不需要额外部署基站,不需要额外增加网络接入设备,不需要经过移动运营商或者因特网,保证了网络状态的稳定性,节省了设备费用以及流量费用。

智能车多模式协同定位系统、方法及智能车辆.pdf
本发明提供智能车多模式协同定位系统及方法,采集车辆行驶路段的路面图像和场景图像,并获取GNSS位置信息;如果接收到GNSS位置信息,则以GNSS位置信息作为定位信息;如果接收不到GNSS位置信息,则检查车辆行驶路段是否预先建立视觉地图数据库,如果否,则根据采集到的路面图像采用基于视觉里程计的车辆定位技术进行位置获取;如果是,则根据采集到的场景图像采用基于视觉地图数据库构建的车辆定位技术进行位置获取;或者,将基于视觉地图数据库构建的车辆定位技术和基于视觉里程计的车辆定位技术得到的位置信息进行融合。本发明融合
适用GNSS的车辆在VSYR盲区定位误差修正方法.pdf
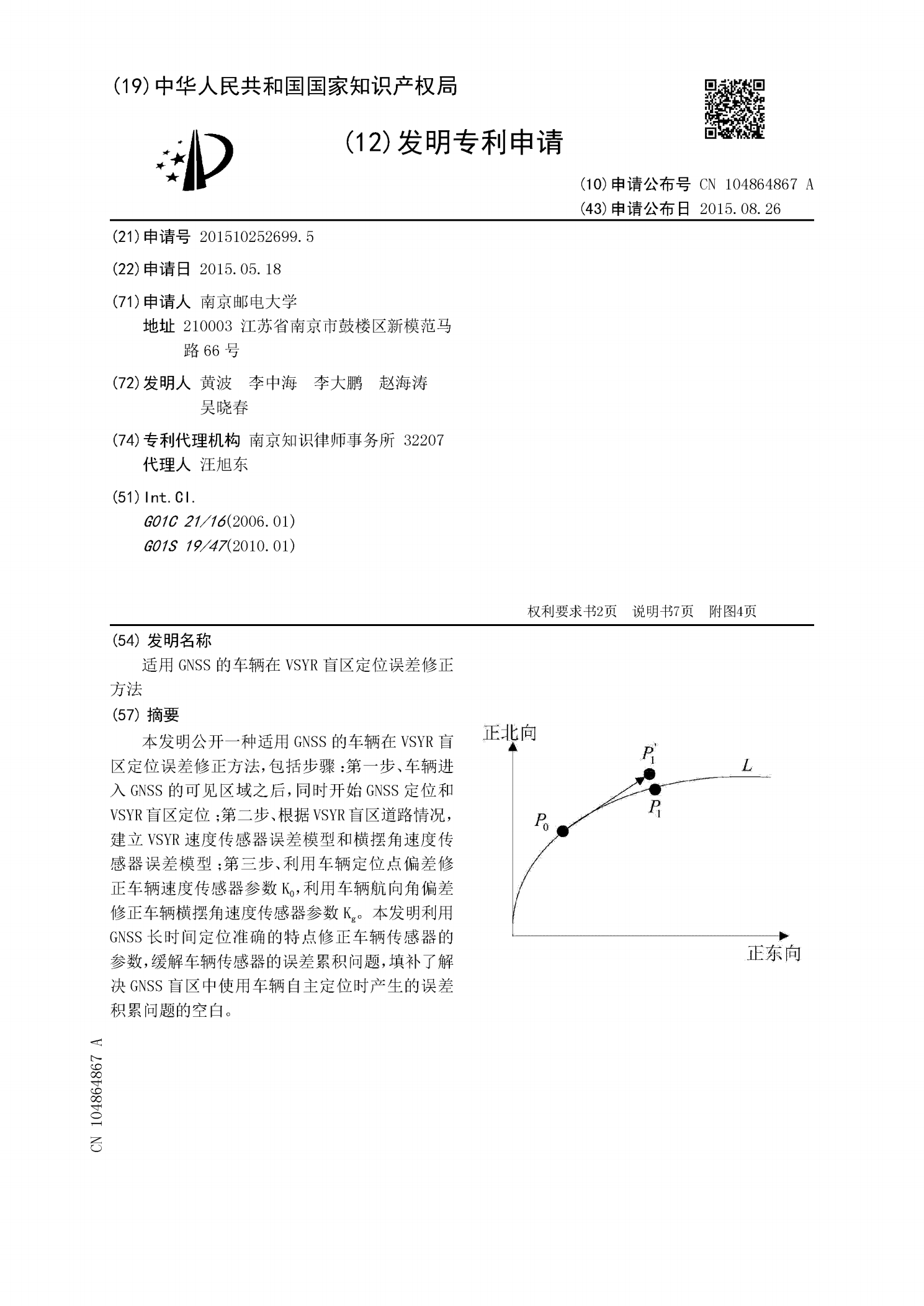
本发明公开一种适用GNSS的车辆在VSYR盲区定位误差修正方法,包括步骤:第一步、车辆进入GNSS的可见区域之后,同时开始GNSS定位和VSYR盲区定位;第二步、根据VSYR盲区道路情况,建立VSYR速度传感器误差模型和横摆角速度传感器误差模型;第三步、利用车辆定位点偏差修正车辆速度传感器参数K

GNSS定位系统在智能塔机的应用.docx
GNSS定位系统在智能塔机的应用GNSS是全球导航卫星系统(GlobalNavigationSatelliteSystem)的缩写,它是一种基于卫星和地面设备的定位导航系统。智能塔机是一种现代化的建筑设备,用于在建筑工地上进行高效的物料搬运和施工作业。本论文将探讨GNSS在智能塔机中的应用,包括其原理、技术特点以及在塔机定位、作业控制和安全监控方面的作用。首先,我们将介绍GNSS定位系统的原理和技术特点。GNSS系统由一组卫星,地面控制站和用户接收器组成。卫星通过发射信号和定时器提供准确的时间和位置信息。