
一种多镜头多线激光雷达测距系统及其测距方法.pdf

一吃****昕靓


1/10
2/10

3/10
4/10

5/10
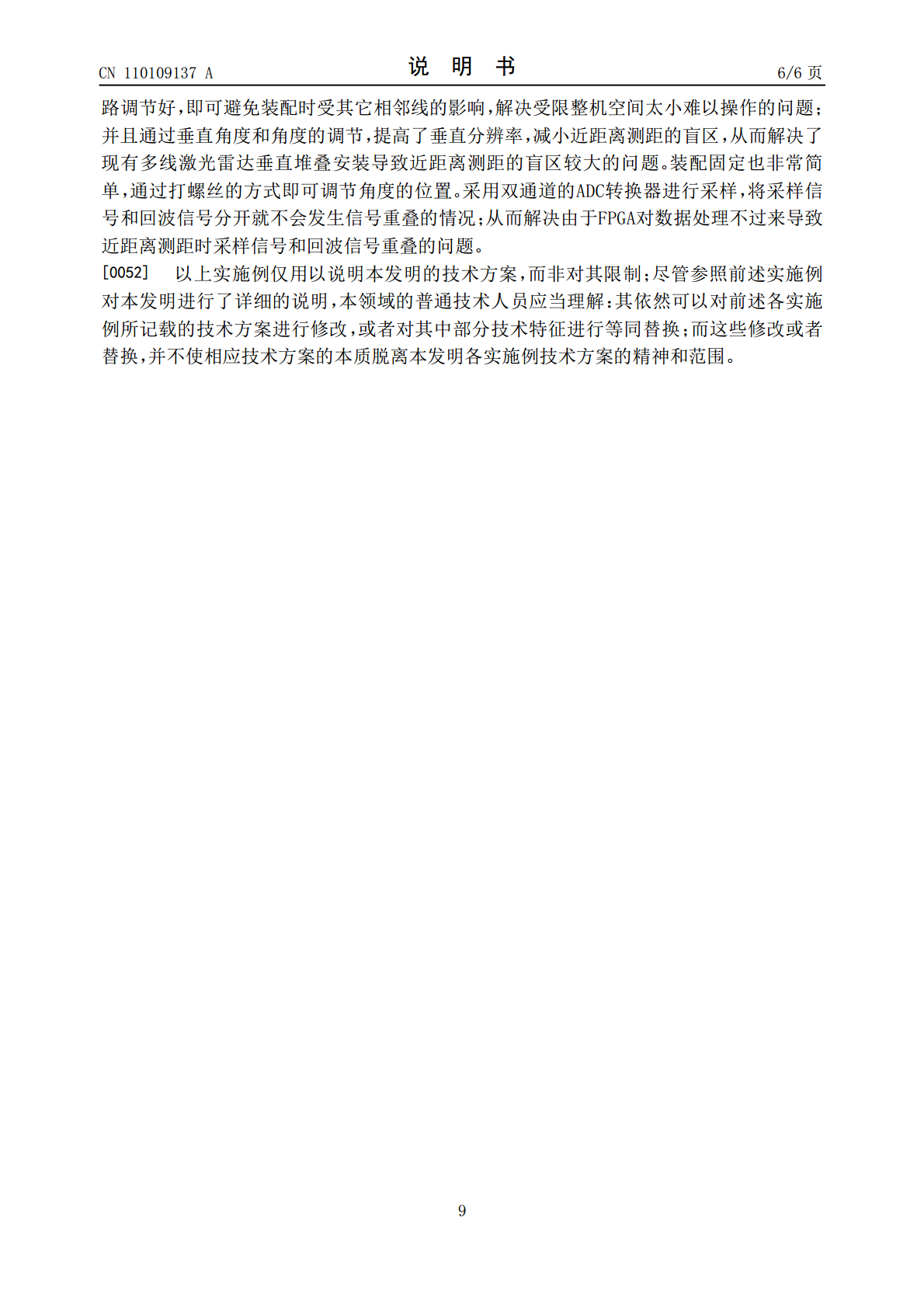
6/10
7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种多镜头多线激光雷达测距系统及其测距方法.pdf
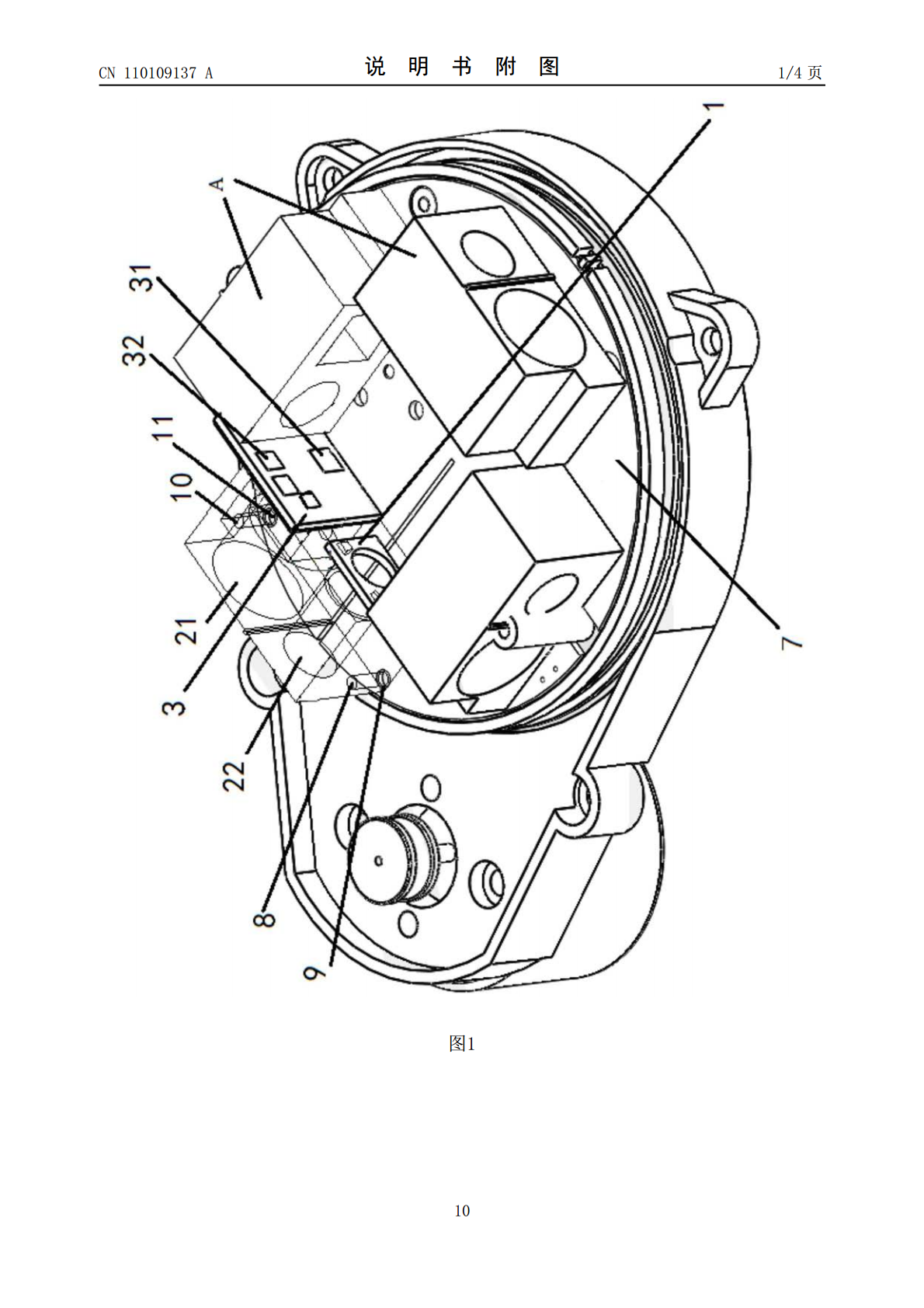
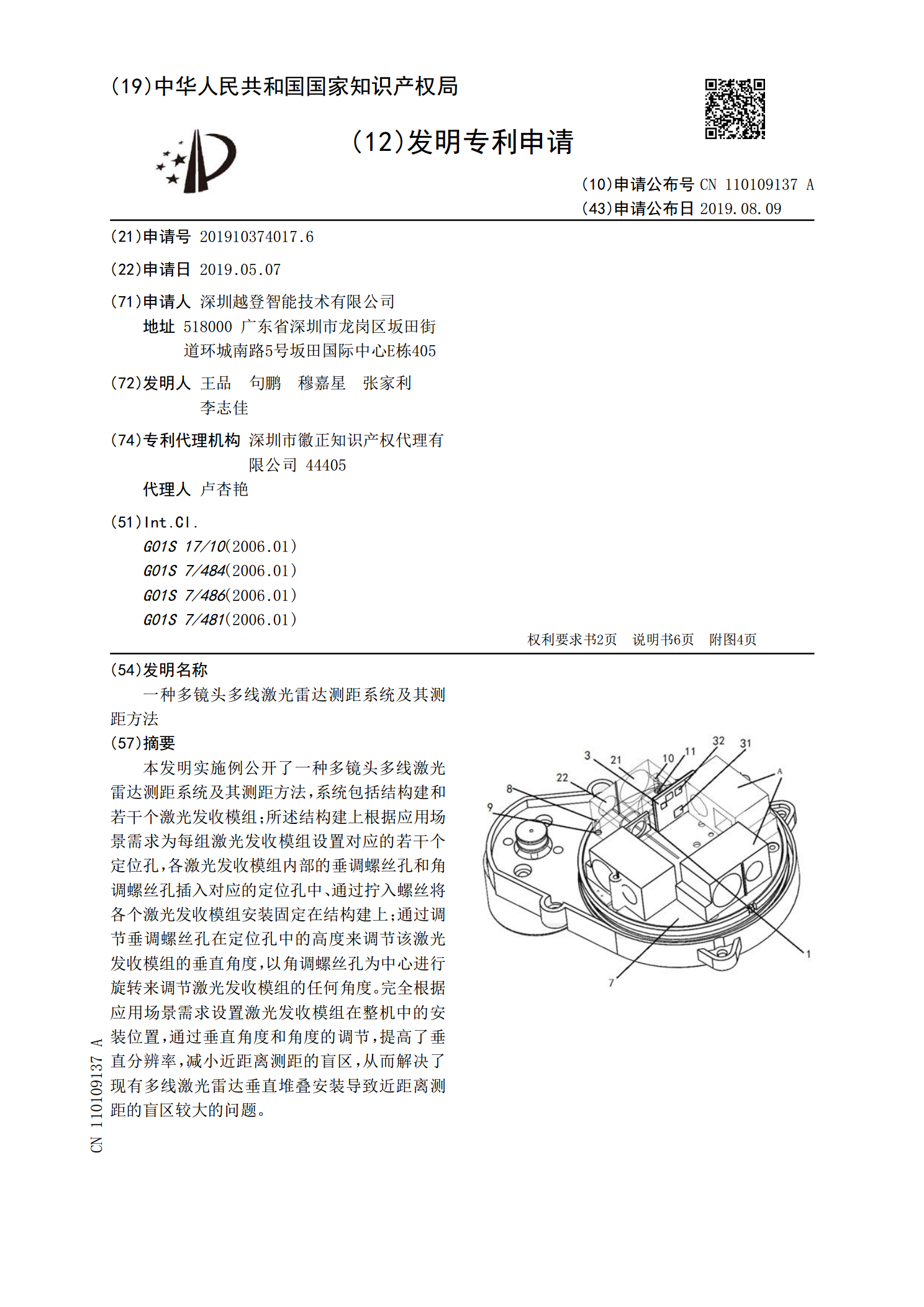
本发明实施例公开了一种多镜头多线激光雷达测距系统及其测距方法,系统包括结构建和若干个激光发收模组;所述结构建上根据应用场景需求为每组激光发收模组设置对应的若干个定位孔,各激光发收模组内部的垂调螺丝孔和角调螺丝孔插入对应的定位孔中、通过拧入螺丝将各个激光发收模组安装固定在结构建上;通过调节垂调螺丝孔在定位孔中的高度来调节该激光发收模组的垂直角度,以角调螺丝孔为中心进行旋转来调节激光发收模组的任何角度。完全根据应用场景需求设置激光发收模组在整机中的安装位置,通过垂直角度和角度的调节,提高了垂直分辨率,减小近距
激光测距方法、激光测距系统及其激光雷达系统.pdf
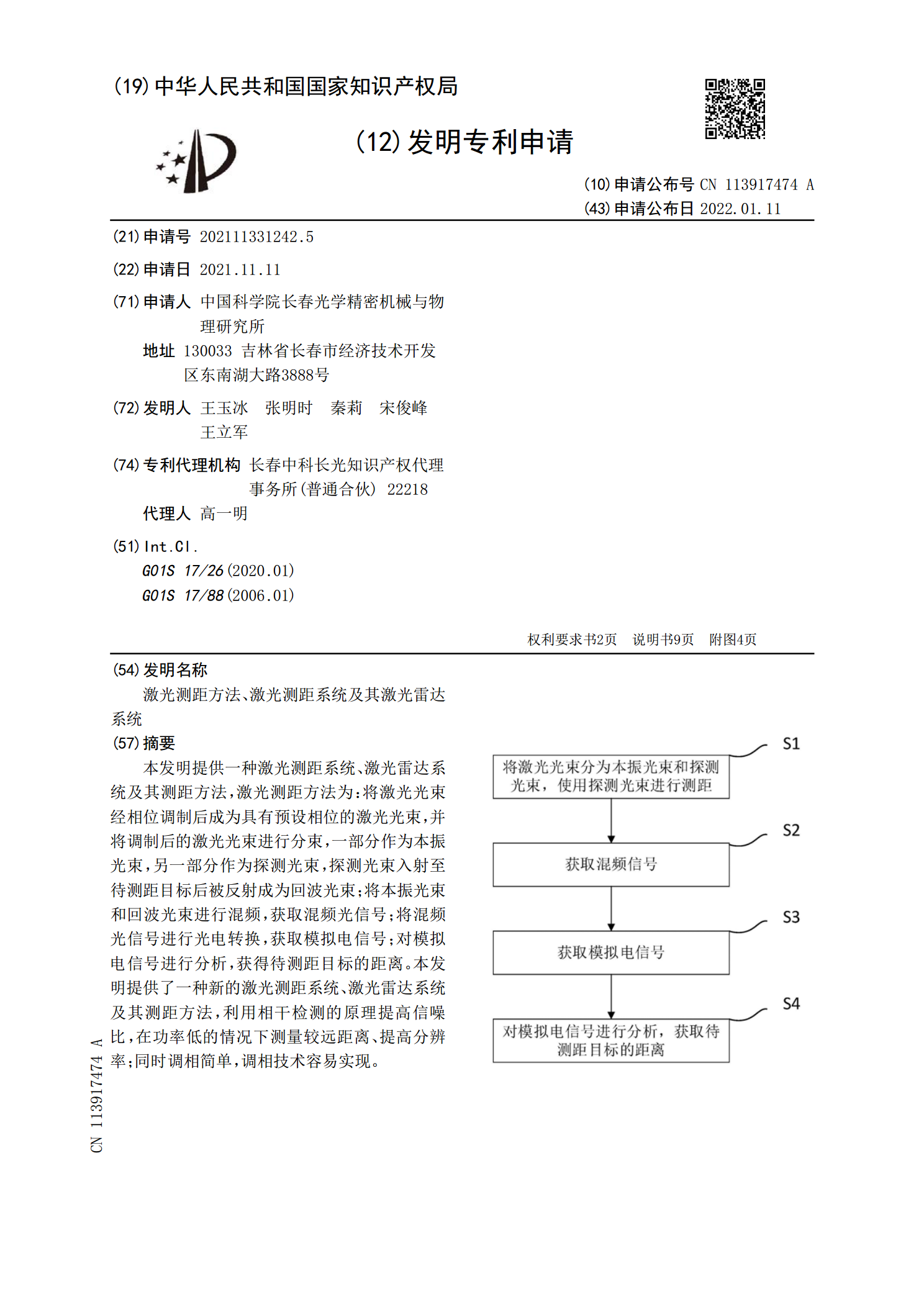
本发明提供一种激光测距系统、激光雷达系统及其测距方法,激光测距方法为:将激光光束经相位调制后成为具有预设相位的激光光束,并将调制后的激光光束进行分束,一部分作为本振光束,另一部分作为探测光束,探测光束入射至待测距目标后被反射成为回波光束;将本振光束和回波光束进行混频,获取混频光信号;将混频光信号进行光电转换,获取模拟电信号;对模拟电信号进行分析,获得待测距目标的距离。本发明提供了一种新的激光测距系统、激光雷达系统及其测距方法,利用相干检测的原理提高信噪比,在功率低的情况下测量较远距离、提高分辨率;同时调相
一种多线光学扫描测距装置及其方法.pdf
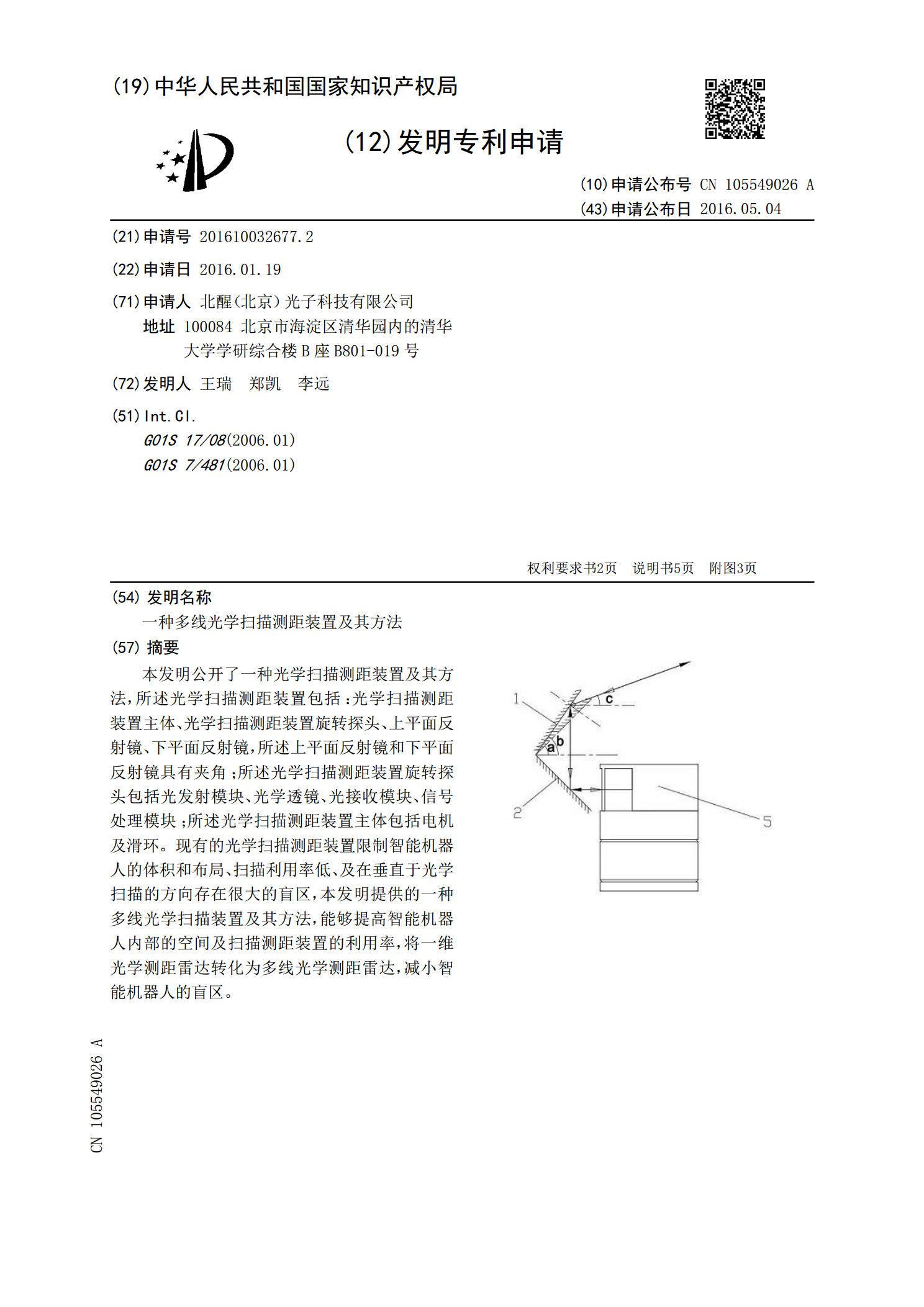
本发明公开了一种光学扫描测距装置及其方法,所述光学扫描测距装置包括:光学扫描测距装置主体、光学扫描测距装置旋转探头、上平面反射镜、下平面反射镜,所述上平面反射镜和下平面反射镜具有夹角;所述光学扫描测距装置旋转探头包括光发射模块、光学透镜、光接收模块、信号处理模块;所述光学扫描测距装置主体包括电机及滑环。现有的光学扫描测距装置限制智能机器人的体积和布局、扫描利用率低、及在垂直于光学扫描的方向存在很大的盲区,本发明提供的一种多线光学扫描装置及其方法,能够提高智能机器人内部的空间及扫描测距装置的利用率,将一维光
一种消除激光雷达盲区的测距方法及测距系统.pdf
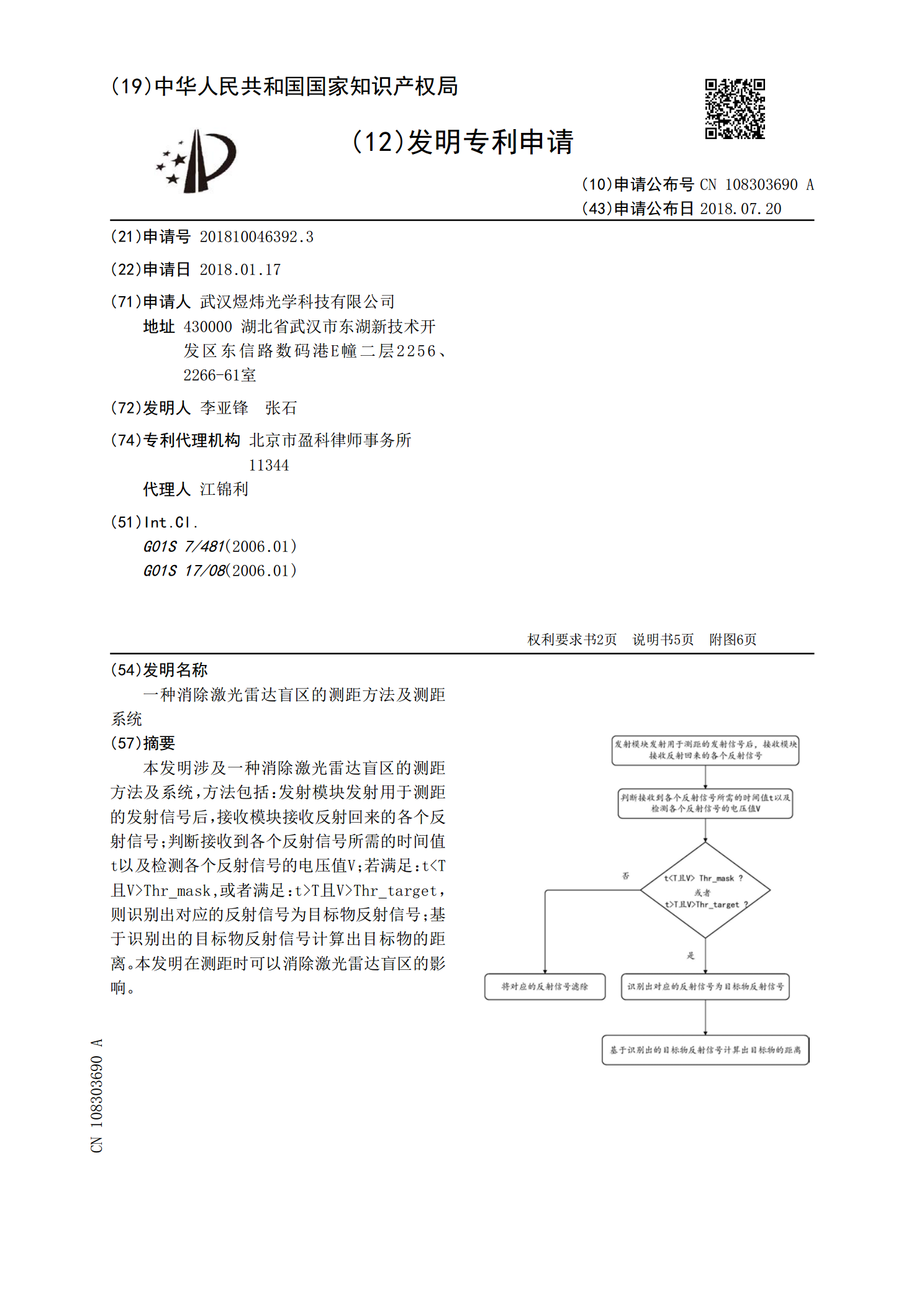
本发明涉及一种消除激光雷达盲区的测距方法及系统,方法包括:发射模块发射用于测距的发射信号后,接收模块接收反射回来的各个反射信号;判断接收到各个反射信号所需的时间值t以及检测各个反射信号的电压值V;若满足:tThr_mask,或者满足:t>T且V>Thr_target,则识别出对应的反射信号为目标物反射信号;基于识别出的目标物反射信号计算出目标物的距离。本发明在测距时可以消除激光雷达盲区的影响。
激光雷达及其测距方法.pdf
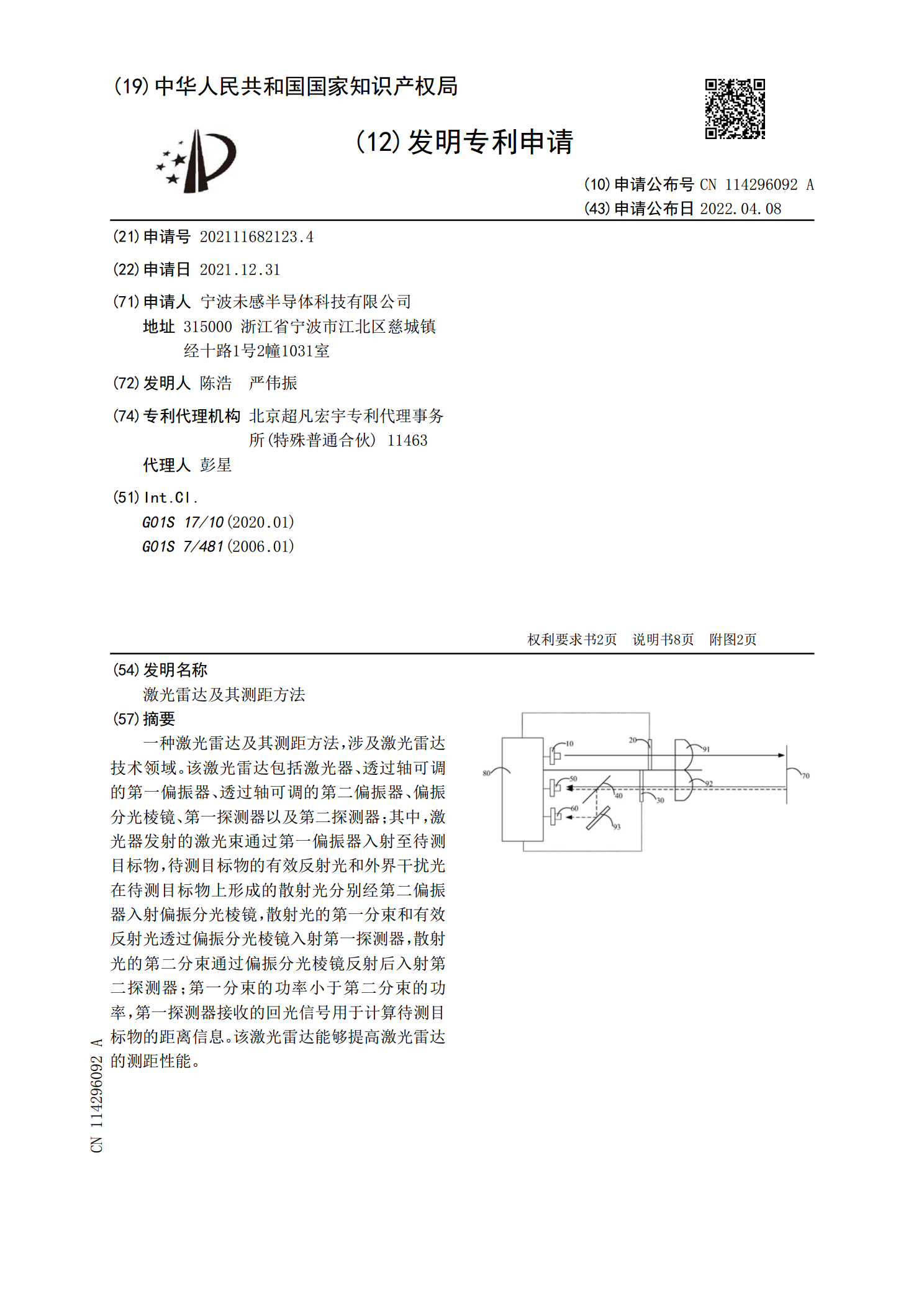
一种激光雷达及其测距方法,涉及激光雷达技术领域。该激光雷达包括激光器、透过轴可调的第一偏振器、透过轴可调的第二偏振器、偏振分光棱镜、第一探测器以及第二探测器;其中,激光器发射的激光束通过第一偏振器入射至待测目标物,待测目标物的有效反射光和外界干扰光在待测目标物上形成的散射光分别经第二偏振器入射偏振分光棱镜,散射光的第一分束和有效反射光透过偏振分光棱镜入射第一探测器,散射光的第二分束通过偏振分光棱镜反射后入射第二探测器;第一分束的功率小于第二分束的功率,第一探测器接收的回光信号用于计算待测目标物的距离信息。