
一种车辆盲区提示方法、系统、可读存储介质及汽车.pdf

灵波****ng


1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车辆盲区提示方法、系统、可读存储介质及汽车.pdf
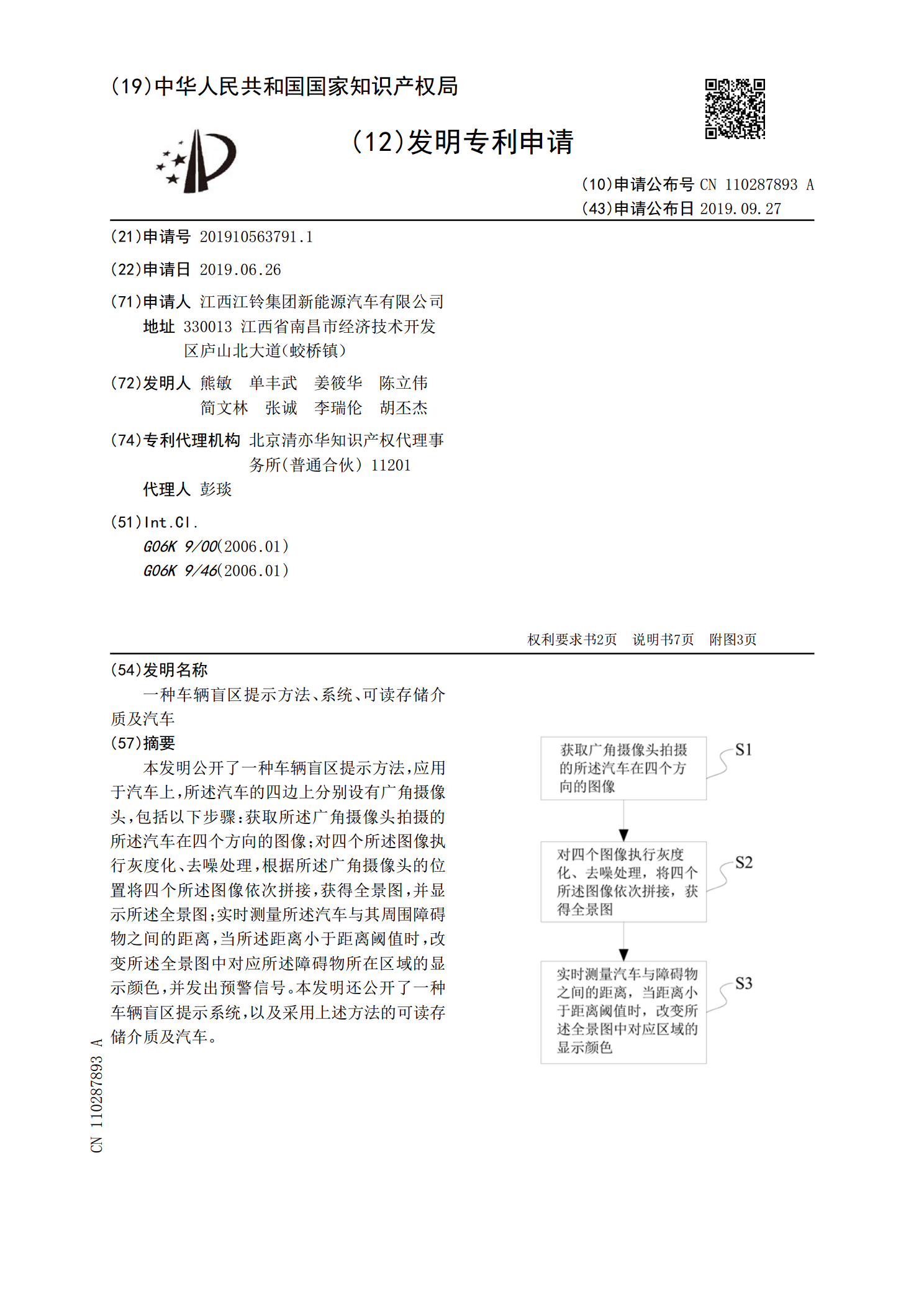
本发明公开了一种车辆盲区提示方法,应用于汽车上,所述汽车的四边上分别设有广角摄像头,包括以下步骤:获取所述广角摄像头拍摄的所述汽车在四个方向的图像;对四个所述图像执行灰度化、去噪处理,根据所述广角摄像头的位置将四个所述图像依次拼接,获得全景图,并显示所述全景图;实时测量所述汽车与其周围障碍物之间的距离,当所述距离小于距离阈值时,改变所述全景图中对应所述障碍物所在区域的显示颜色,并发出预警信号。本发明还公开了一种车辆盲区提示系统,以及采用上述方法的可读存储介质及汽车。
一种车辆安全提示方法、系统、可读存储介质及车辆.pdf
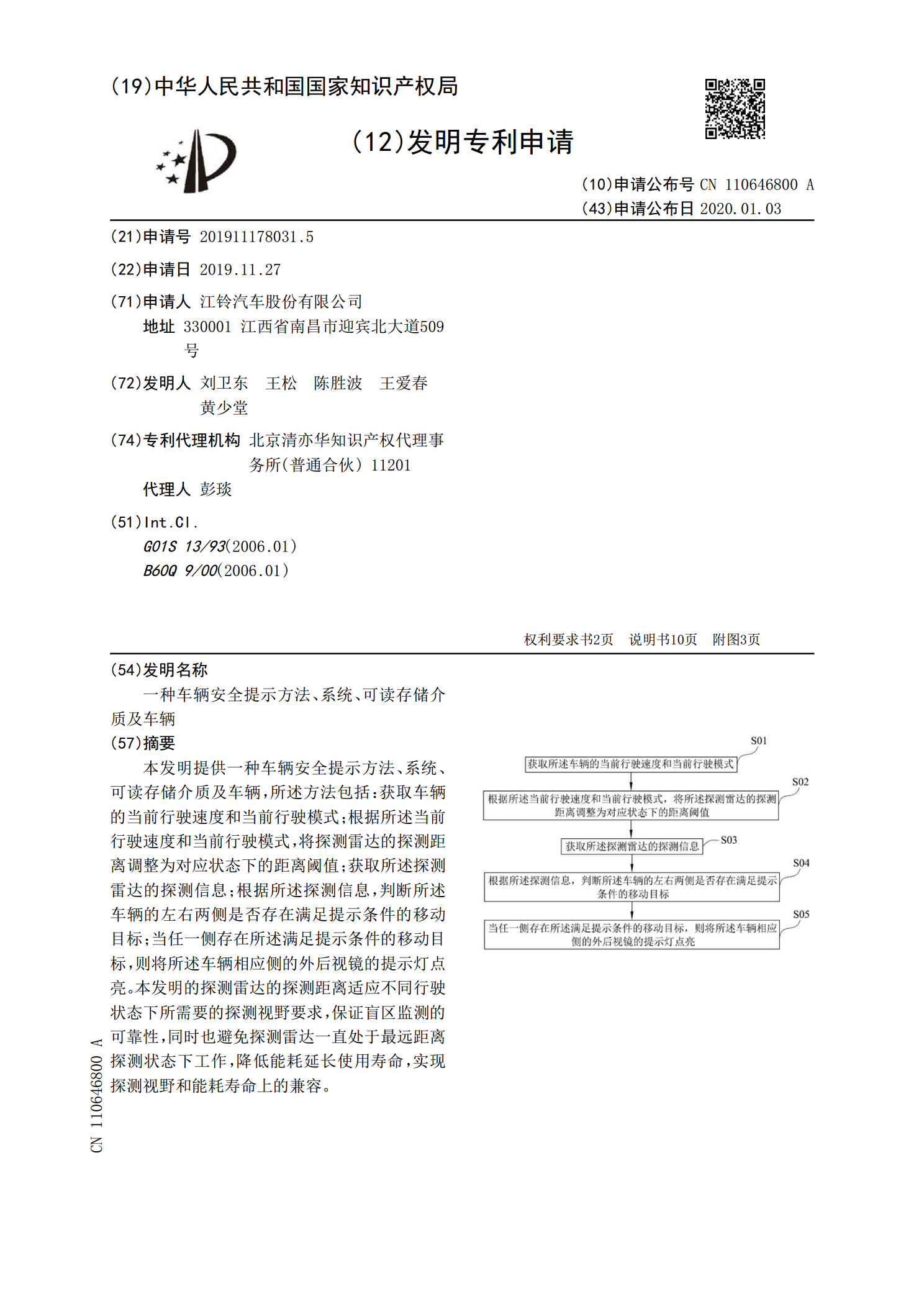
本发明提供一种车辆安全提示方法、系统、可读存储介质及车辆,所述方法包括:获取车辆的当前行驶速度和当前行驶模式;根据所述当前行驶速度和当前行驶模式,将探测雷达的探测距离调整为对应状态下的距离阈值;获取所述探测雷达的探测信息;根据所述探测信息,判断所述车辆的左右两侧是否存在满足提示条件的移动目标;当任一侧存在所述满足提示条件的移动目标,则将所述车辆相应侧的外后视镜的提示灯点亮。本发明的探测雷达的探测距离适应不同行驶状态下所需要的探测视野要求,保证盲区监测的可靠性,同时也避免探测雷达一直处于最远距离探测状态下工
车辆盲区提示方法、装置、设备及计算机可读存储介质.pdf
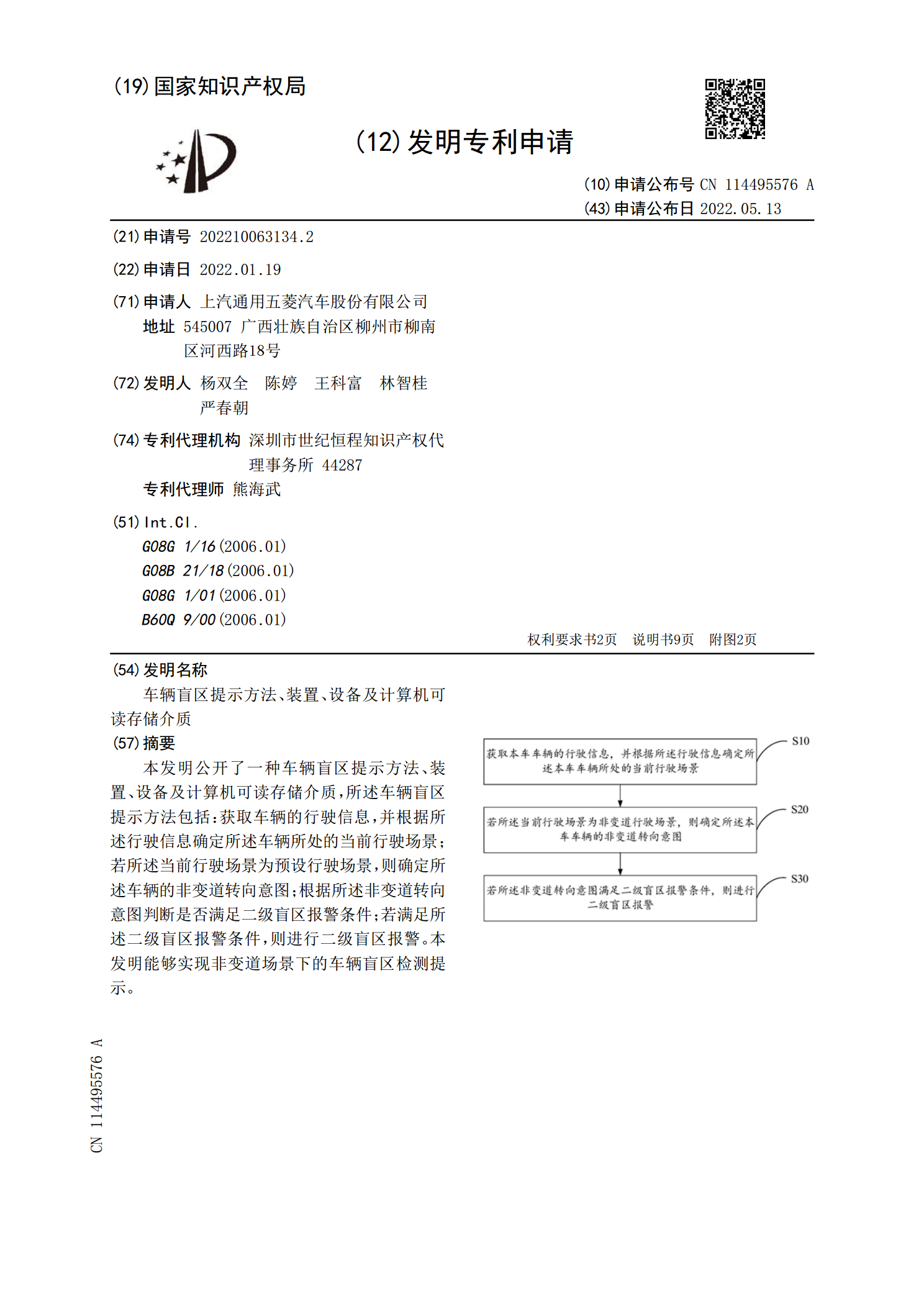
本发明公开了一种车辆盲区提示方法、装置、设备及计算机可读存储介质,所述车辆盲区提示方法包括:获取车辆的行驶信息,并根据所述行驶信息确定所述车辆所处的当前行驶场景;若所述当前行驶场景为预设行驶场景,则确定所述车辆的非变道转向意图;根据所述非变道转向意图判断是否满足二级盲区报警条件;若满足所述二级盲区报警条件,则进行二级盲区报警。本发明能够实现非变道场景下的车辆盲区检测提示。
一种提示灯控制方法、系统、可读存储介质及车辆.pdf
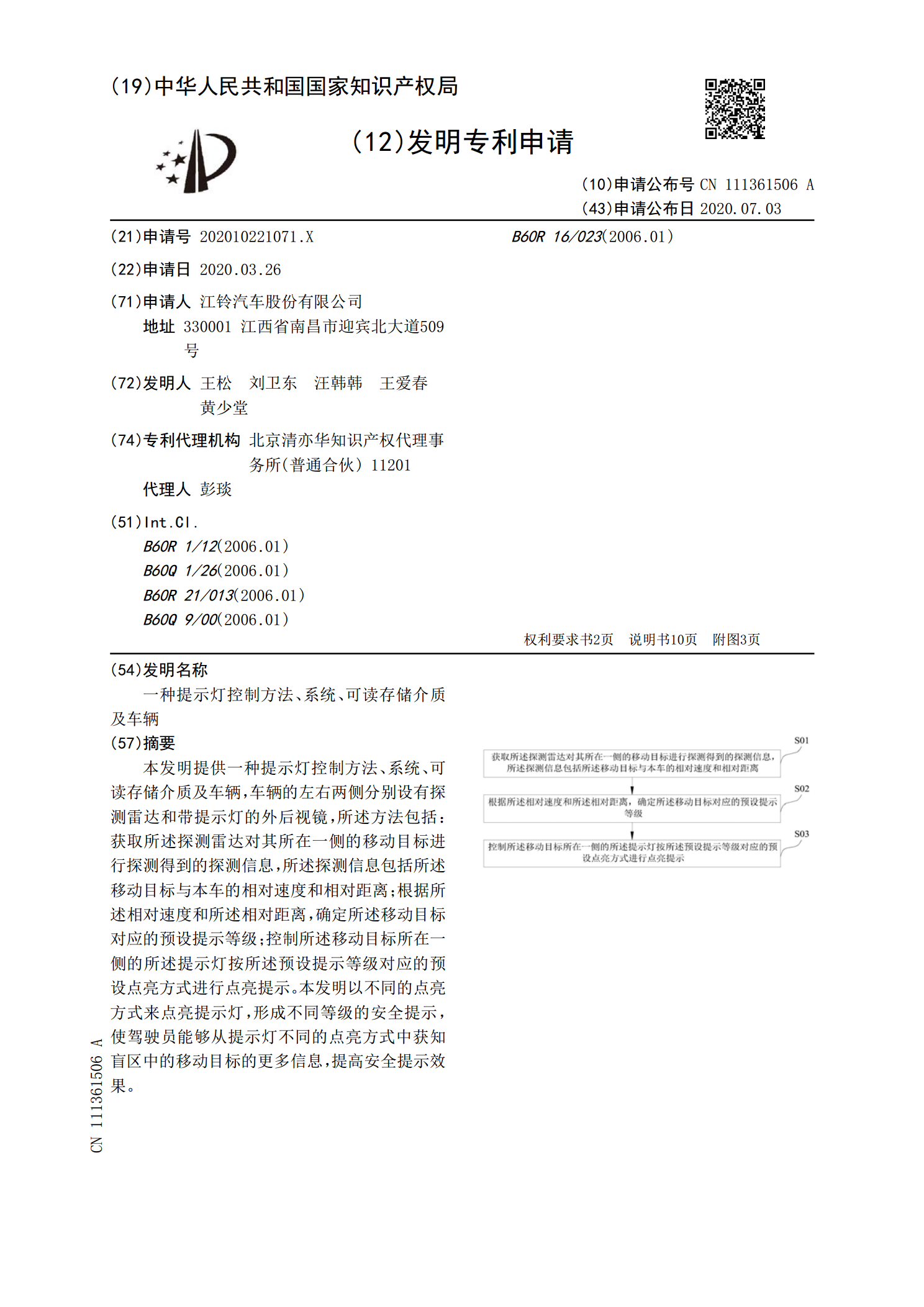
本发明提供一种提示灯控制方法、系统、可读存储介质及车辆,车辆的左右两侧分别设有探测雷达和带提示灯的外后视镜,所述方法包括:获取所述探测雷达对其所在一侧的移动目标进行探测得到的探测信息,所述探测信息包括所述移动目标与本车的相对速度和相对距离;根据所述相对速度和所述相对距离,确定所述移动目标对应的预设提示等级;控制所述移动目标所在一侧的所述提示灯按所述预设提示等级对应的预设点亮方式进行点亮提示。本发明以不同的点亮方式来点亮提示灯,形成不同等级的安全提示,使驾驶员能够从提示灯不同的点亮方式中获知盲区中的移动目标
车辆制动提示方法、系统、终端设备及可读存储介质.pdf
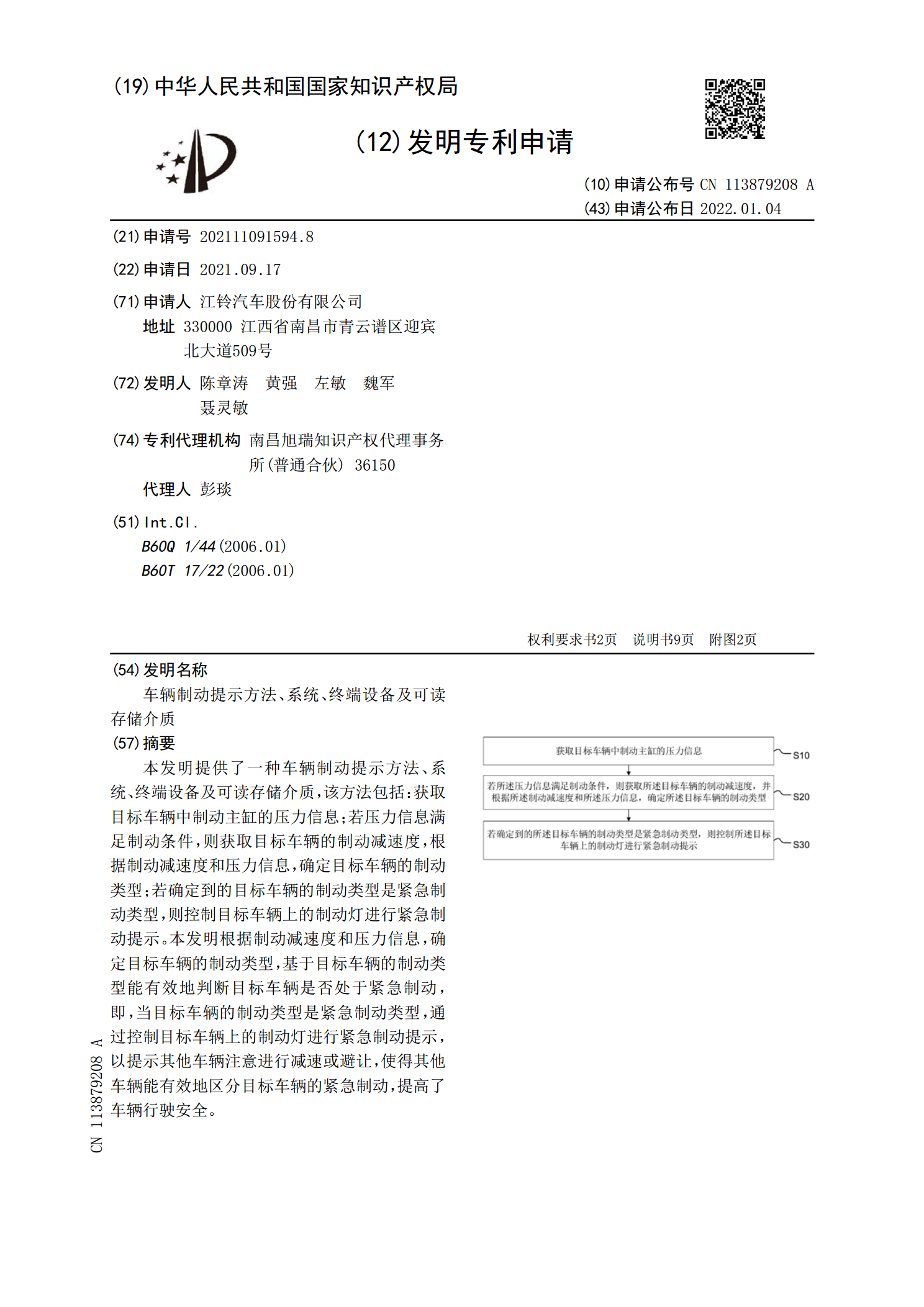
本发明提供了一种车辆制动提示方法、系统、终端设备及可读存储介质,该方法包括:获取目标车辆中制动主缸的压力信息;若压力信息满足制动条件,则获取目标车辆的制动减速度,根据制动减速度和压力信息,确定目标车辆的制动类型;若确定到的目标车辆的制动类型是紧急制动类型,则控制目标车辆上的制动灯进行紧急制动提示。本发明根据制动减速度和压力信息,确定目标车辆的制动类型,基于目标车辆的制动类型能有效地判断目标车辆是否处于紧急制动,即,当目标车辆的制动类型是紧急制动类型,通过控制目标车辆上的制动灯进行紧急制动提示,以提示其他车