
汽车盲区障碍物的检测方法、系统、存储介质和汽车.pdf

春兰****89


1/9
2/9

3/9
4/9
5/9

6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
汽车盲区障碍物的检测方法、系统、存储介质和汽车.pdf
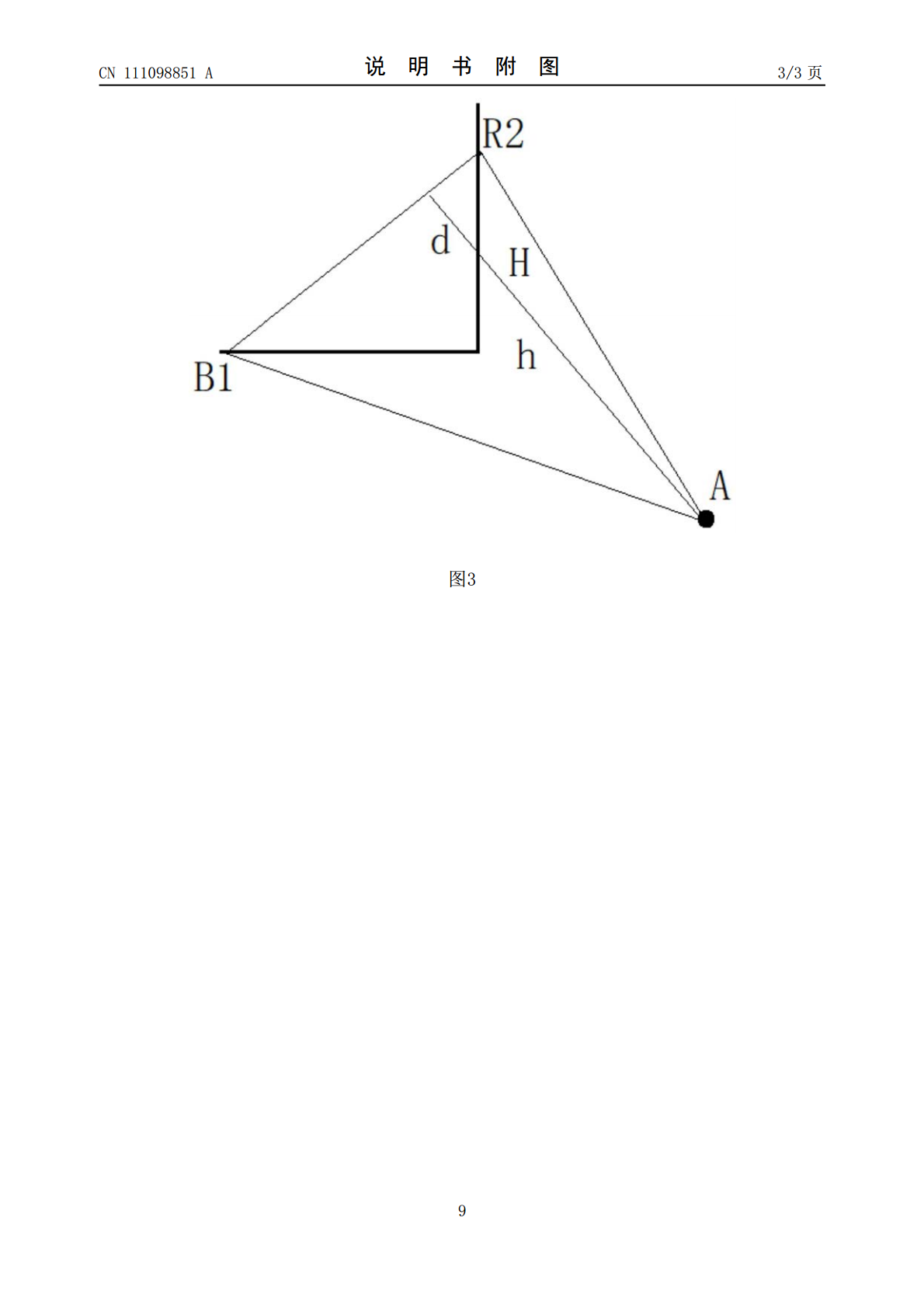
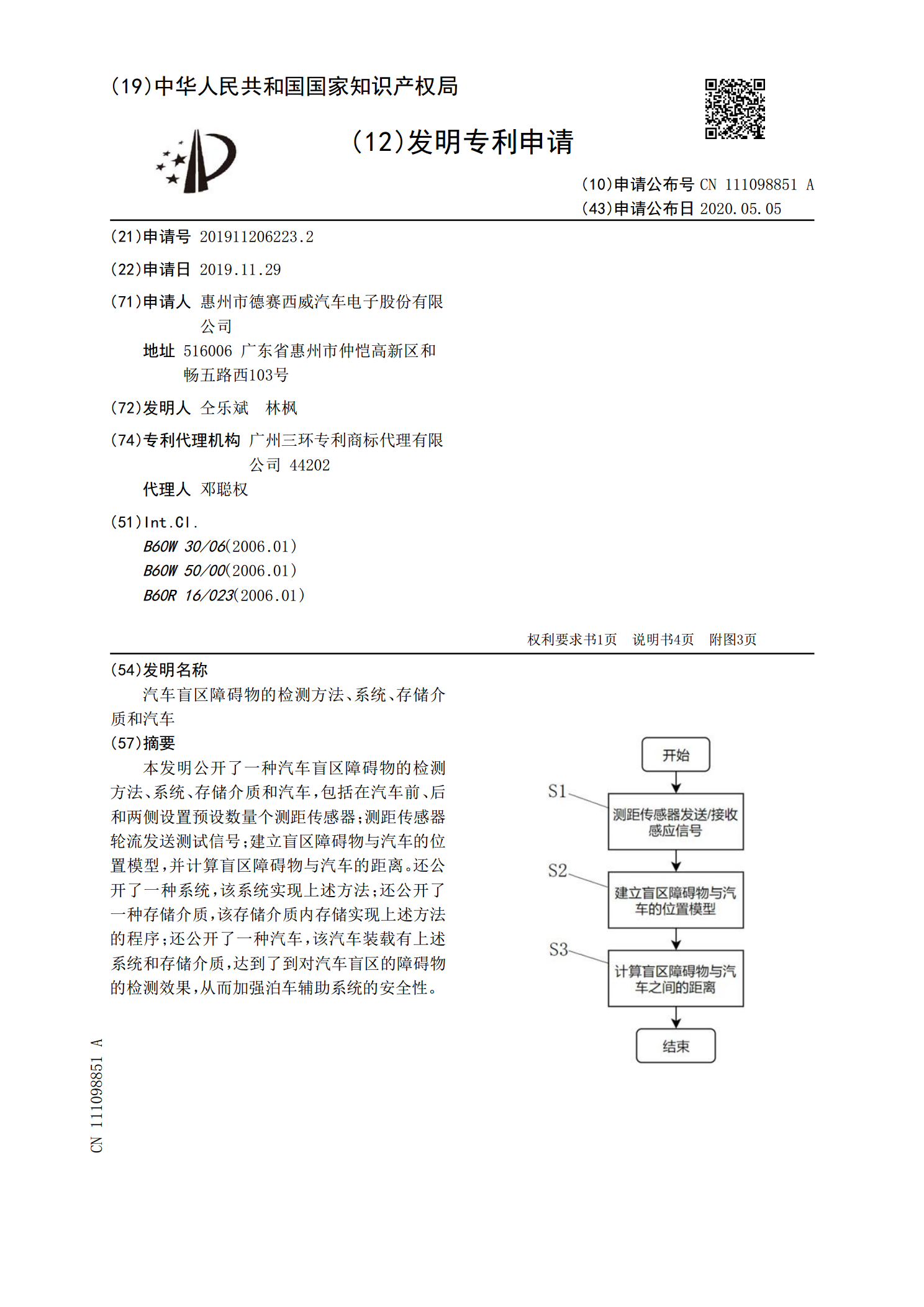
本发明公开了一种汽车盲区障碍物的检测方法、系统、存储介质和汽车,包括在汽车前、后和两侧设置预设数量个测距传感器;测距传感器轮流发送测试信号;建立盲区障碍物与汽车的位置模型,并计算盲区障碍物与汽车的距离。还公开了一种系统,该系统实现上述方法;还公开了一种存储介质,该存储介质内存储实现上述方法的程序;还公开了一种汽车,该汽车装载有上述系统和存储介质,达到了到对汽车盲区的障碍物的检测效果,从而加强泊车辅助系统的安全性。

汽车A柱盲区的评价方法、系统、存储介质及设备.pdf
本发明提供一种汽车A柱盲区的评价方法、系统、存储介质及设备,方法包括:根据盲点修正表对目标车辆的预设座椅状态下的左右A柱盲点进行修正以得到修正点的位置信息;以经过修正点的水平面为基准面向车前方分别构建第一平面和第二平面;提取目标车辆的任一A柱结构的外轮廓面,并构建经过修正点且分别与A柱结构的外轮廓面两侧相切的外切面,设为第三平面和第四平面;构建以修正点为球心及r为半径的球面,且与第一平面、第二平面、第三平面和第四平面组建合围区域,并获取合围区域的最大宽度;将合围区域的最大宽度与预设宽度进行对比分析以判断A
一种车辆盲区提示方法、系统、可读存储介质及汽车.pdf
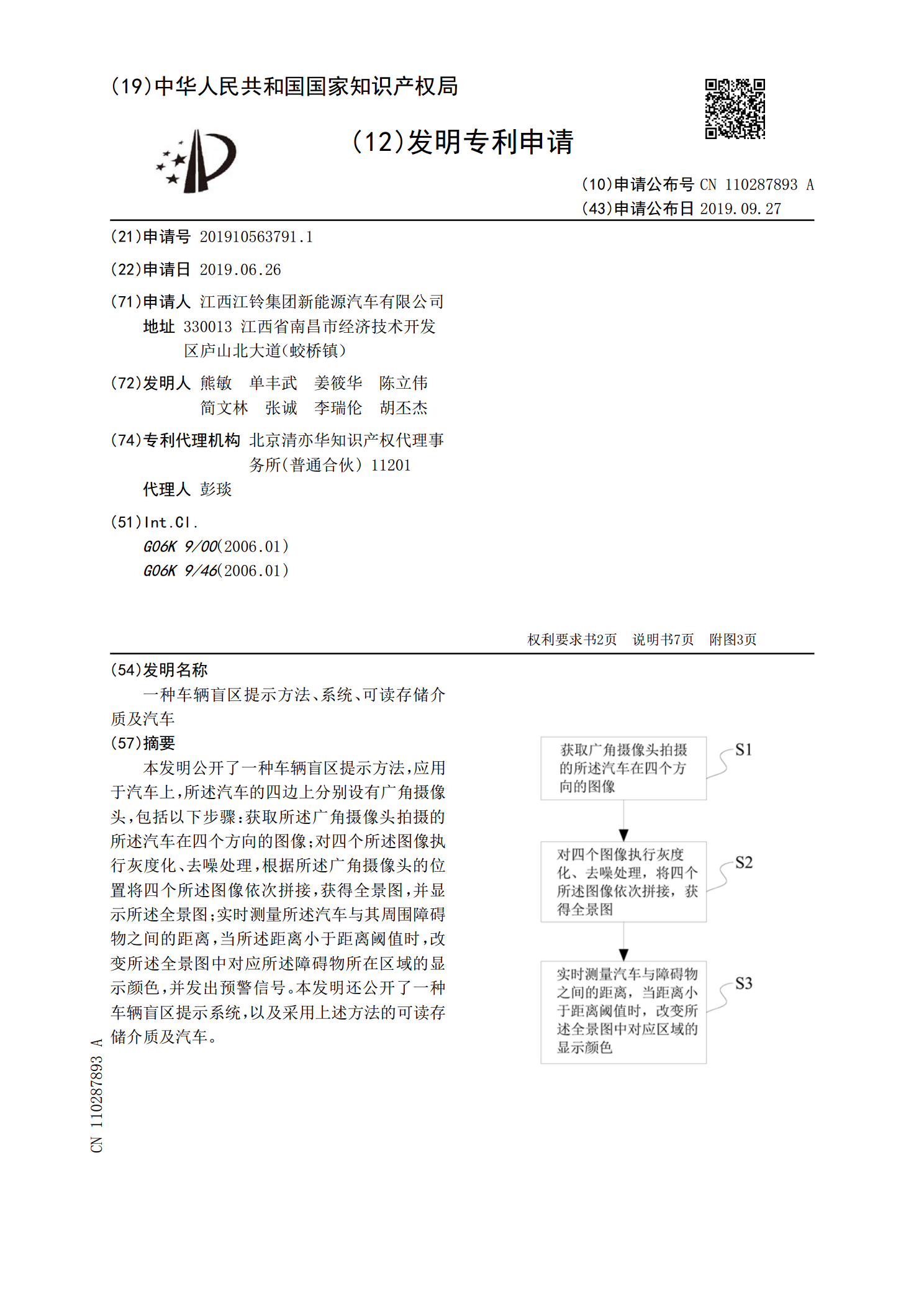
本发明公开了一种车辆盲区提示方法,应用于汽车上,所述汽车的四边上分别设有广角摄像头,包括以下步骤:获取所述广角摄像头拍摄的所述汽车在四个方向的图像;对四个所述图像执行灰度化、去噪处理,根据所述广角摄像头的位置将四个所述图像依次拼接,获得全景图,并显示所述全景图;实时测量所述汽车与其周围障碍物之间的距离,当所述距离小于距离阈值时,改变所述全景图中对应所述障碍物所在区域的显示颜色,并发出预警信号。本发明还公开了一种车辆盲区提示系统,以及采用上述方法的可读存储介质及汽车。
盲区行人检测方法、系统、车辆及存储介质.pdf
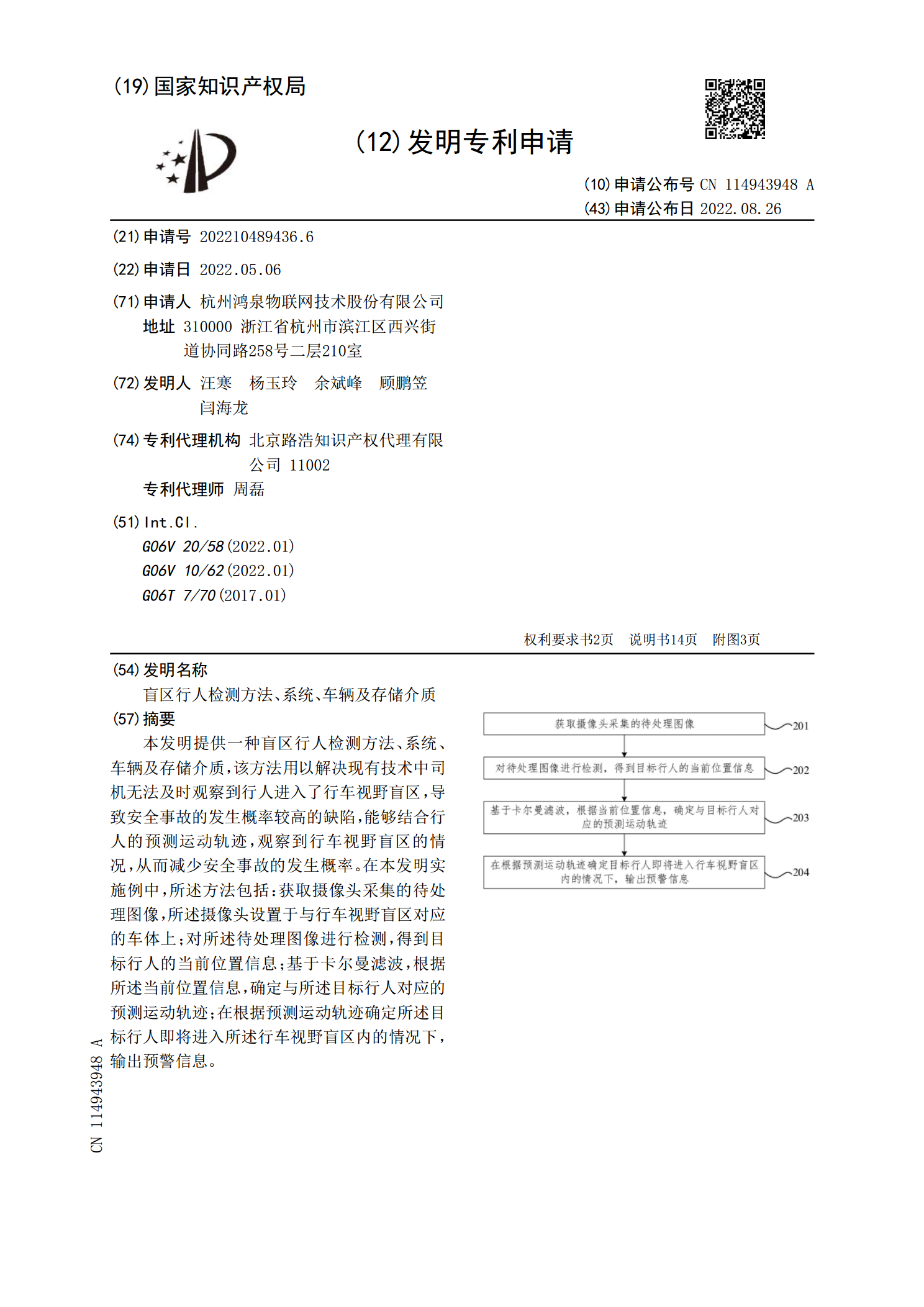
本发明提供一种盲区行人检测方法、系统、车辆及存储介质,该方法用以解决现有技术中司机无法及时观察到行人进入了行车视野盲区,导致安全事故的发生概率较高的缺陷,能够结合行人的预测运动轨迹,观察到行车视野盲区的情况,从而减少安全事故的发生概率。在本发明实施例中,所述方法包括:获取摄像头采集的待处理图像,所述摄像头设置于与行车视野盲区对应的车体上;对所述待处理图像进行检测,得到目标行人的当前位置信息;基于卡尔曼滤波,根据所述当前位置信息,确定与所述目标行人对应的预测运动轨迹;在根据预测运动轨迹确定所述目标行人即将进
盲区障碍物提醒方法、车辆及存储介质.pdf
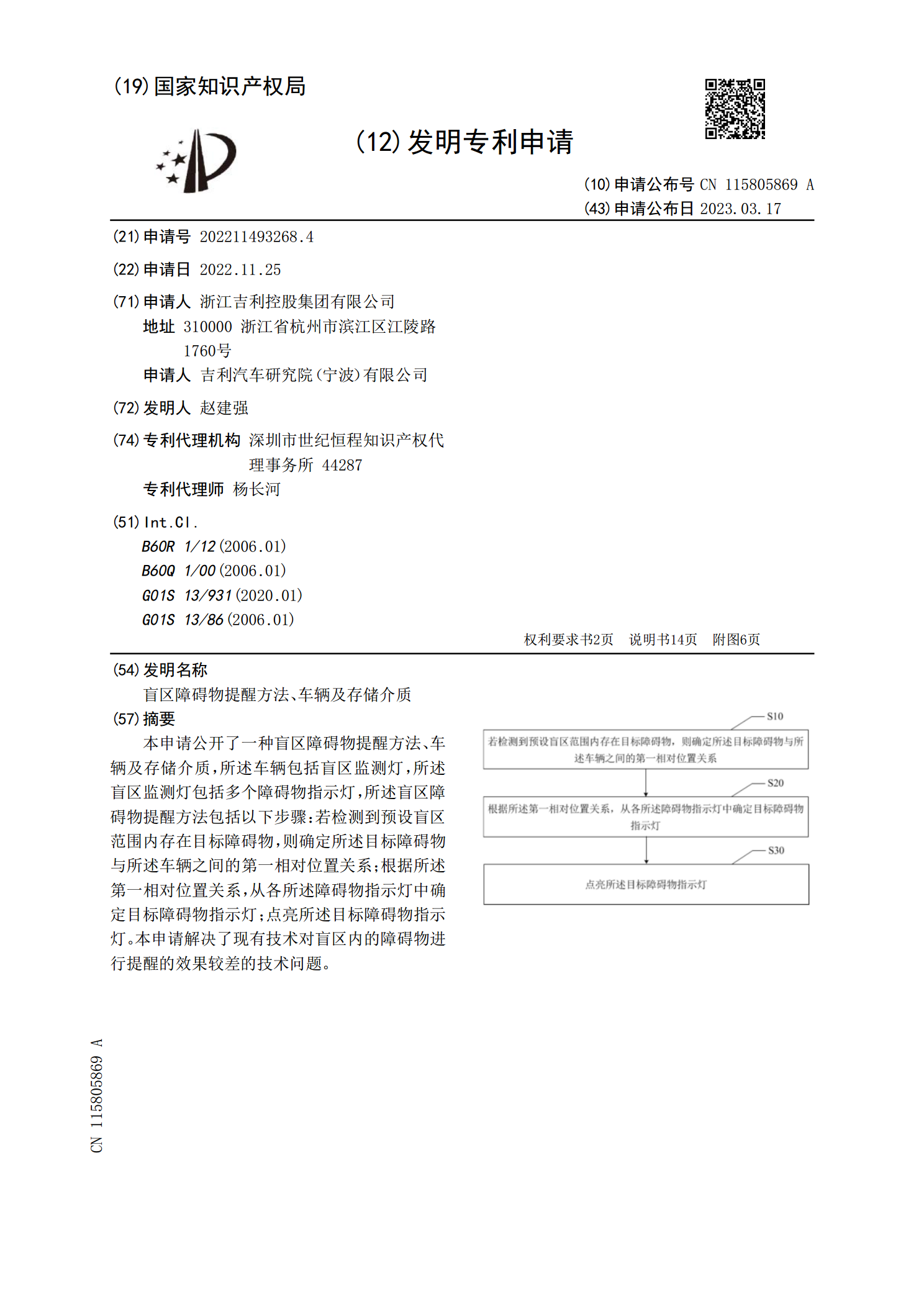
本申请公开了一种盲区障碍物提醒方法、车辆及存储介质,所述车辆包括盲区监测灯,所述盲区监测灯包括多个障碍物指示灯,所述盲区障碍物提醒方法包括以下步骤:若检测到预设盲区范围内存在目标障碍物,则确定所述目标障碍物与所述车辆之间的第一相对位置关系;根据所述第一相对位置关系,从各所述障碍物指示灯中确定目标障碍物指示灯;点亮所述目标障碍物指示灯。本申请解决了现有技术对盲区内的障碍物进行提醒的效果较差的技术问题。