
一种船舶辅助驾驶数据的处理方法和系统.pdf

一只****iu


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种船舶辅助驾驶数据的处理方法和系统.pdf
本发明公开了一种船舶辅助驾驶数据的处理方法和系统,所述方法包括以下步骤:获取驾驶员的头部视频数据;根据头部视频数据计算驾驶员的视觉盲区位置信息;根据视觉盲区位置信息获取视觉盲区位置的视频数据;对视觉盲区位置的视频数据内的船舶信息和周围环境信息进行处理;将处理后的船舶信息和周围环境信息发送到LED显示屏进行显示。本发明能使得LED显示屏显示的视频图像跟随驾驶员视角方向的变化而变化,从而保证显示的视频图像与驶员视角方向的图像相匹配,以提高驾驶员对盲区位置环境信息的判断速度和准确性,降低事故发生的概率。本发明可
一种船舶驾驶室的还原数据处理方法、系统和存储介质.pdf
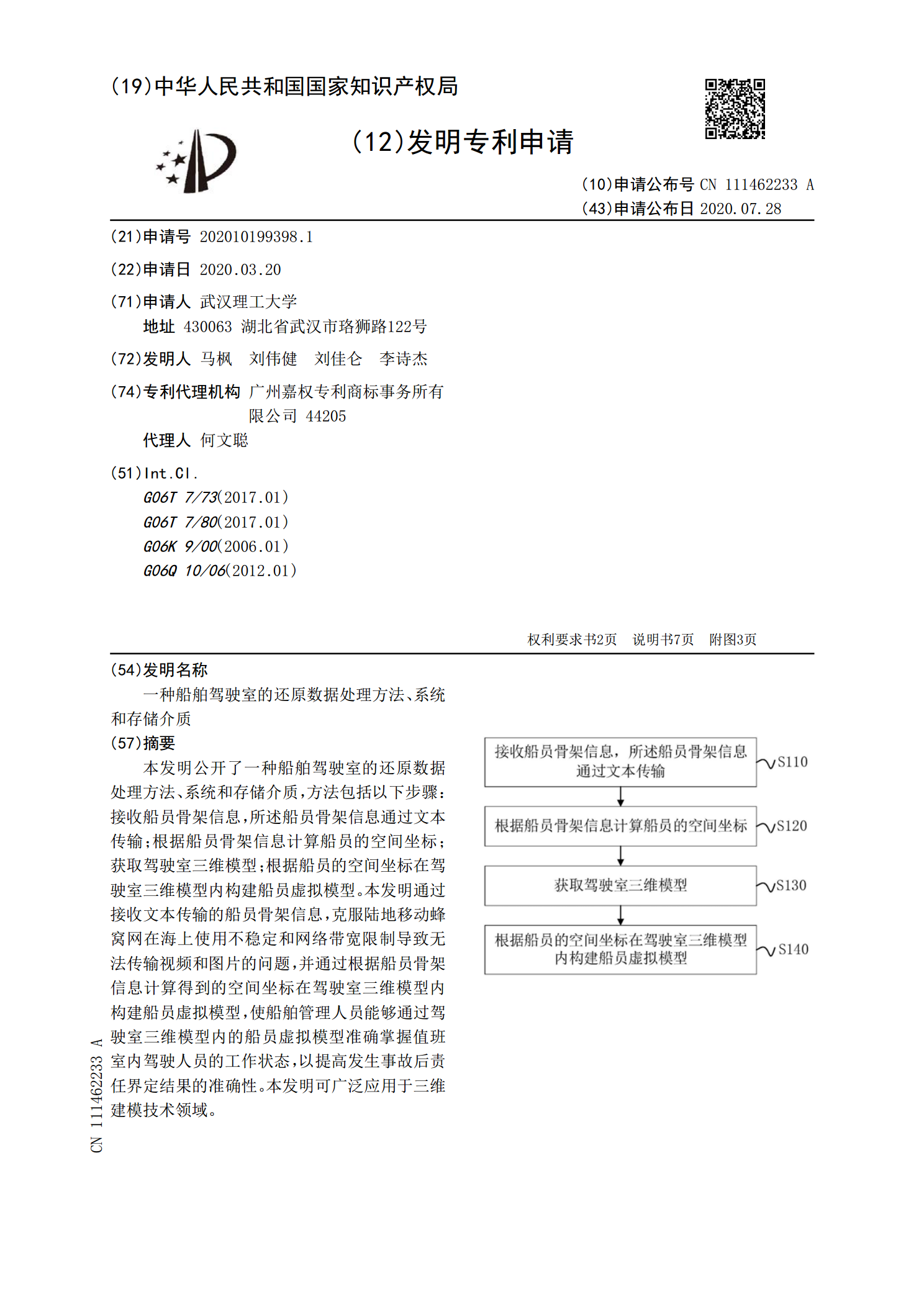
本发明公开了一种船舶驾驶室的还原数据处理方法、系统和存储介质,方法包括以下步骤:接收船员骨架信息,所述船员骨架信息通过文本传输;根据船员骨架信息计算船员的空间坐标;获取驾驶室三维模型;根据船员的空间坐标在驾驶室三维模型内构建船员虚拟模型。本发明通过接收文本传输的船员骨架信息,克服陆地移动蜂窝网在海上使用不稳定和网络带宽限制导致无法传输视频和图片的问题,并通过根据船员骨架信息计算得到的空间坐标在驾驶室三维模型内构建船员虚拟模型,使船舶管理人员能够通过驾驶室三维模型内的船员虚拟模型准确掌握值班室内驾驶人员的工

一种船舶辅助泊岸方法和系统.pdf
本发明提供了一种船舶辅助泊岸方法和系统,其特点在于:利用日盲紫外成像法确定船舶相对于泊位的位置信息;同时利用GPS法,采用至少两个GPS接收器,确定船舶相对于泊位的姿态角,可有效地解决在能见度很低时,使船舶在贴近岸边时能安全泊岸。进一步地,本发明的方法和装置中,还可优选地采用归一化自相关算法和数据融合算法对日盲紫外成像模块和GPS信号接收模块所接收到的坐标数据以及角度数据进行整合处理,以提高定位精度。通过引用本发明所述船舶辅助泊岸方法和系统,能明显解决现行技术下船舶在雾天靠泊难度大以及现行技术中船舶引航靠

一种船舶辅助泊岸方法和系统.pdf
本发明提供了一种船舶辅助泊岸方法和系统。该泊岸方法采用日盲紫外光成像法,包括采用至少两个日盲紫外光成像模块,根据其从预先在岸上设置的日盲紫外光源阵列所接收的光信号,计算船舶在泊岸过程中,相对于港口泊位岸线的位置和姿态。进一步地,当采用三个以上日盲紫外光成像模块时,本发明的方法和装置采用归一化自相关算法以及数据融合算法,用以提高船舶位置和姿态数据的精度。通过引用本发明所述船舶辅助泊岸方法和系统,能明显解决现行技术下船舶在雾天靠泊难度大以及现行技术中船舶引航靠泊装置受天气、环境等影响大的问题。
驾驶辅助方法和系统.pdf
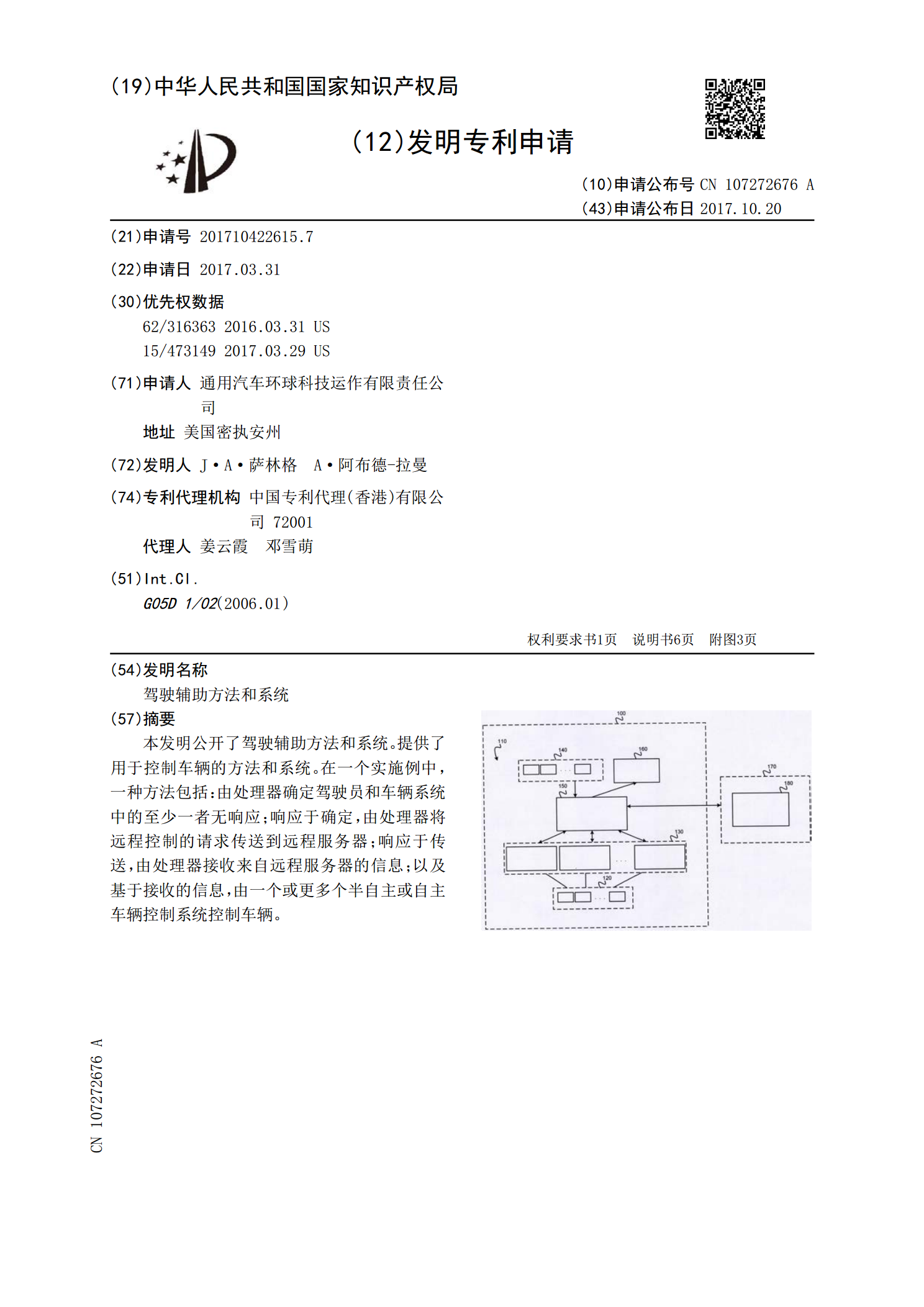
本发明公开了驾驶辅助方法和系统。提供了用于控制车辆的方法和系统。在一个实施例中,一种方法包括:由处理器确定驾驶员和车辆系统中的至少一者无响应;响应于确定,由处理器将远程控制的请求传送到远程服务器;响应于传送,由处理器接收来自远程服务器的信息;以及基于接收的信息,由一个或更多个半自主或自主车辆控制系统控制车辆。